También podría gustarte
- Working ModelDocumento15 páginasWorking ModelAdrián Criollo RiosAún no hay calificaciones
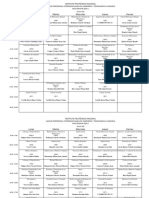
- HORARIOS 2024-1v2Documento71 páginasHORARIOS 2024-1v2Humberto RodAún no hay calificaciones
- Ejercicios EstadisticasDocumento9 páginasEjercicios EstadisticasJavier TrocelAún no hay calificaciones
- Taller N 1 Cálculo Diferencial: Clasificación de Problemas: N Básico, Medio, F RetoDocumento3 páginasTaller N 1 Cálculo Diferencial: Clasificación de Problemas: N Básico, Medio, F RetobreinerAún no hay calificaciones
- 3 Consideraciones de CálculoDocumento21 páginas3 Consideraciones de CálculoRicardo Armijo TroncosoAún no hay calificaciones
- Plan de Contingencia Hospedaje El Eden Final AcabadoDocumento37 páginasPlan de Contingencia Hospedaje El Eden Final AcabadoJhoel Bautista GómezAún no hay calificaciones
- Soluciones A Exámenes de Ciencias ExactasDocumento55 páginasSoluciones A Exámenes de Ciencias Exactasriemma0% (2)
- Inecuaciones de Primer Grado y Segundo Grado PDFDocumento4 páginasInecuaciones de Primer Grado y Segundo Grado PDFRoy VasquezAún no hay calificaciones
- MAT2P - U1 - Ficha de Refuerzo Logica Proposicional PDFDocumento1 páginaMAT2P - U1 - Ficha de Refuerzo Logica Proposicional PDFMario Roberto SacacaAún no hay calificaciones
- 1° Sec.Documento164 páginas1° Sec.Cynthia Salinas CaryAún no hay calificaciones
- Pavimento ClaseDocumento21 páginasPavimento ClaseRem PrexAún no hay calificaciones
- 1 Plan Curricular MDocumento34 páginas1 Plan Curricular MManuel SalcedoAún no hay calificaciones
- HernandezFelipe GabrielAlejandro M12S2AI3Documento6 páginasHernandezFelipe GabrielAlejandro M12S2AI3laura hernandez felipe0% (1)
- Cuestionario 2Documento21 páginasCuestionario 2Gleitze RamosAún no hay calificaciones
- Ajuste Razonable Concuprise SextoDocumento7 páginasAjuste Razonable Concuprise SextoDaniela DelirioAún no hay calificaciones
- (Sociedad y Estado) Apuntes Rodrigo Araya Chandía - 180318Documento11 páginas(Sociedad y Estado) Apuntes Rodrigo Araya Chandía - 180318javiera santibañezAún no hay calificaciones
- La Brújula de La Competitividad - Basado en CMIDocumento84 páginasLa Brújula de La Competitividad - Basado en CMIEcoserviciosAún no hay calificaciones
- La Expresividad Poetica Analisis Del Signo Del Alba de Pedro Perez Clotet PDFDocumento378 páginasLa Expresividad Poetica Analisis Del Signo Del Alba de Pedro Perez Clotet PDFFernando SantosAún no hay calificaciones
- Caracteristicas de Las MatematicasDocumento9 páginasCaracteristicas de Las MatematicasRuth Heiidii BC33% (3)
- Evaluación de Estadística Primer Periodo Grado OctavoDocumento2 páginasEvaluación de Estadística Primer Periodo Grado OctavoJuan Gabriel Murcia0% (1)
- 4.3 Proyeccion Estereografica: 4.3.2 Falsilla de WulffDocumento53 páginas4.3 Proyeccion Estereografica: 4.3.2 Falsilla de WulffPaulina Tapia CastilloAún no hay calificaciones
- A2 Opp1Documento3 páginasA2 Opp1sergio herreraAún no hay calificaciones
- Error EstandarDocumento4 páginasError EstandarMarcoAún no hay calificaciones
- Saber 11 AC201710200956Documento4 páginasSaber 11 AC201710200956norma santosAún no hay calificaciones
- Triángulos CongruentesDocumento5 páginasTriángulos Congruentesgohanuhernandes hernandesAún no hay calificaciones
- Historia de Ingeneria EconomicaDocumento2 páginasHistoria de Ingeneria Economicaanon_497465990% (1)
- Sesión de MatemáticaDocumento9 páginasSesión de MatemáticaSánchezRebecaAún no hay calificaciones
- Canal, Vertedero, TunelDocumento50 páginasCanal, Vertedero, TunelJhon Anderzo Diaz Garcia100% (1)
- Practica VI - Dinámica LinealDocumento7 páginasPractica VI - Dinámica LinealEdwin FrancoAún no hay calificaciones
- Tangible Intangible, Empirismo, Valor, Computación y InformáticaDocumento18 páginasTangible Intangible, Empirismo, Valor, Computación y InformáticaLaura Maritza Ari FloresAún no hay calificaciones