También podría gustarte
- Reporte Final Robotica V2 PDFDocumento19 páginasReporte Final Robotica V2 PDFYairAún no hay calificaciones
- Reporte Final RoboticaDocumento34 páginasReporte Final RoboticaYairAún no hay calificaciones
- Robótica EvolutivaDocumento8 páginasRobótica EvolutivaDELMORE ORTIZ GAMALIELAún no hay calificaciones
- Estado Del Arte ManipulaciónDocumento6 páginasEstado Del Arte ManipulaciónFlabio Dario Mirelez DelgadoAún no hay calificaciones
- Aprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraDe EverandAprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraAún no hay calificaciones
- Introduccion A La RoboticaDocumento5 páginasIntroduccion A La RoboticaGanimedes EstelarAún no hay calificaciones
- Diseño Conceptual Brazo RoboticoDocumento26 páginasDiseño Conceptual Brazo RoboticoOrlando Zech Ramos100% (1)
- 60743Documento7 páginas60743Ernesto Lex VazquezAún no hay calificaciones
- Aplicacion de La RoboticaDocumento2 páginasAplicacion de La RoboticaMarcos Espinoza100% (1)
- Fase 6Documento16 páginasFase 6carolina pereiraAún no hay calificaciones
- SimulaciónDocumento8 páginasSimulaciónhombredehieloAún no hay calificaciones
- Informe - Robotica.Documento18 páginasInforme - Robotica.JhanniferAún no hay calificaciones
- Plataforma StewartDocumento12 páginasPlataforma StewartJoseph Jason Gomez QuispeAún no hay calificaciones
- SimulacionDocumento36 páginasSimulacionjoel armando Gómez Hernández'sAún no hay calificaciones
- Robot PUMA 560Documento28 páginasRobot PUMA 560itzel macAún no hay calificaciones
- Robots en Paralelo y PlanaresDocumento21 páginasRobots en Paralelo y Planaresjhon celis mendezAún no hay calificaciones
- Cinemática de Robot OmnidireccionalDocumento6 páginasCinemática de Robot OmnidireccionalMario Pilco SosaAún no hay calificaciones
- PROYECTO DE RoboticaDocumento52 páginasPROYECTO DE RoboticaGutierrez Juan Eduardo100% (1)
- Estado Del ArteDocumento4 páginasEstado Del ArteFabian German RodriguezAún no hay calificaciones
- AscensorDocumento14 páginasAscensorSneyder ZabalaAún no hay calificaciones
- Robotica - Brazo Robotico Con Pic'sDocumento9 páginasRobotica - Brazo Robotico Con Pic'sRaul Alberto Valdez BarreraAún no hay calificaciones
- Informe SemafooroDocumento9 páginasInforme SemafooroWanda ReyesAún no hay calificaciones
- Software de Simulacion para Ingenieria Quimica-1Documento15 páginasSoftware de Simulacion para Ingenieria Quimica-1Anonymous 1MjHWwAún no hay calificaciones
- Elaboracion de Prototipos, Rad y Programacion ExtremaDocumento19 páginasElaboracion de Prototipos, Rad y Programacion ExtremaRicardo PerezAún no hay calificaciones
- Posicion de RobotsDocumento16 páginasPosicion de RobotsAlexxsAún no hay calificaciones
- Los Robots Móviles Están Provistos de Un Sistema de AutomociónDocumento8 páginasLos Robots Móviles Están Provistos de Un Sistema de AutomociónCYNTHIA CHACONAún no hay calificaciones
- Diseño de Un Brazo Robotico de Configuracion CilindricaDocumento33 páginasDiseño de Un Brazo Robotico de Configuracion CilindricaMayc HerreraAún no hay calificaciones
- Diseño de Celdas RobóticasDocumento5 páginasDiseño de Celdas RobóticasJuan Carlos Barberán MuñozAún no hay calificaciones
- Presentacion Artículos de RobóticaDocumento21 páginasPresentacion Artículos de RobóticaIvanArizmendiAún no hay calificaciones
- Impacto de La Robotica en La Industria - WordDocumento22 páginasImpacto de La Robotica en La Industria - WordCristhiam De LeónAún no hay calificaciones
- Protesis de Brazo BiomedicoDocumento30 páginasProtesis de Brazo BiomedicomemelucasAún no hay calificaciones
- Reporte de Practicas PLCDocumento26 páginasReporte de Practicas PLCJulio InsunzaAún no hay calificaciones
- Proyecto 2Documento6 páginasProyecto 2Kenny J. Muñiz BellidoAún no hay calificaciones
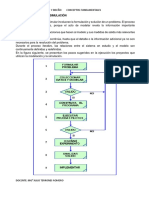
- 3 Metodología de La SimulaciónDocumento4 páginas3 Metodología de La SimulaciónLuis Enrique GuevaraAún no hay calificaciones
- Robot Scara y PumaDocumento3 páginasRobot Scara y PumaCesar Caballero OliveraAún no hay calificaciones
- TFM Antonio Del Abril de MurDocumento57 páginasTFM Antonio Del Abril de MuromarAún no hay calificaciones
- Anteproyecto Diseño de Sistemas MecatrónicosDocumento12 páginasAnteproyecto Diseño de Sistemas MecatrónicosDaniel Barrantes OviedoAún no hay calificaciones
- Aponte Resumen ConferenciaDocumento16 páginasAponte Resumen ConferenciaJavier OrtizAún no hay calificaciones
- Laboratorio 1Documento9 páginasLaboratorio 1Andree CrAún no hay calificaciones
- Proyecto de Tesis - Brazo RobóticoDocumento17 páginasProyecto de Tesis - Brazo RobóticoVíctor Barreto VásquezAún no hay calificaciones
- ConclusionesDocumento2 páginasConclusionesJavier ParodiAún no hay calificaciones
- Trabajo Final RoboticaDocumento10 páginasTrabajo Final RoboticaAlexis SolanoAún no hay calificaciones
- Avance 2Documento9 páginasAvance 2CarlosSantanaAún no hay calificaciones
- Estructura y Funcionamiento de Un Robot SubDocumento5 páginasEstructura y Funcionamiento de Un Robot SubDarwin GMAún no hay calificaciones
- Elaboracion de Un Robot Bipedo de Caminado DinamicoDocumento115 páginasElaboracion de Un Robot Bipedo de Caminado DinamicoPedro Palencia100% (1)
- Presentación 5Documento17 páginasPresentación 5Guillermo Caminero RamírezAún no hay calificaciones
- If FormulaciónDocumento9 páginasIf FormulaciónCARLOS ALONSO GUEVARA MEDINAAún no hay calificaciones
- Aplicacion en MATLAB y SIMULINK PDFDocumento6 páginasAplicacion en MATLAB y SIMULINK PDFchase200385Aún no hay calificaciones
- Investigacion ManipuladoresDocumento6 páginasInvestigacion ManipuladoresenocAún no hay calificaciones
- Casos de Aplicación de La Simulacion...Documento11 páginasCasos de Aplicación de La Simulacion...Heidy Mares Florez100% (1)
- Simulacion de ProcesosDocumento3 páginasSimulacion de ProcesosHoracio RodriguezAún no hay calificaciones
- Estructura Mecánica de Un RobotDocumento13 páginasEstructura Mecánica de Un RobotKevin MontillaAún no hay calificaciones
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDocumento5 páginasLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioAún no hay calificaciones
- Labview para SimulacionDocumento9 páginasLabview para SimulacionAleAún no hay calificaciones
- Robótica IndustrialDocumento8 páginasRobótica IndustrialRenzo Mamani CherresAún no hay calificaciones
- Robotica en La Industria y Regla de JacksonDocumento30 páginasRobotica en La Industria y Regla de JacksonlorenaAún no hay calificaciones
- Robots Manual MitsubishiDocumento23 páginasRobots Manual MitsubishiJose Fernandez100% (1)
- Resumen Examen SelecDocumento60 páginasResumen Examen SelecLeo FariaAún no hay calificaciones
- Proyecto Final - VRAMDocumento15 páginasProyecto Final - VRAMDomms DommsAún no hay calificaciones
- Modelado y simulación de redes. Aplicación de QoS con opnet modelerDe EverandModelado y simulación de redes. Aplicación de QoS con opnet modelerAún no hay calificaciones
- Resolucion Mtess 642-2020Documento14 páginasResolucion Mtess 642-2020Sergio Pereira SánchezAún no hay calificaciones
- Informecerro VerdeDocumento10 páginasInformecerro VerdeRodrigo Torres CuadrosAún no hay calificaciones
- Formas de PrevencionDocumento4 páginasFormas de PrevencionGonzales Carpio SabrinaAún no hay calificaciones
- VRRPDocumento3 páginasVRRPdanilo ortizAún no hay calificaciones
- Formacion Sociocultural-Ana Fernanda Covarrubias SanchezDocumento7 páginasFormacion Sociocultural-Ana Fernanda Covarrubias SanchezFer CovarrubiasAún no hay calificaciones
- Cce 10Documento243 páginasCce 10lecalpeAún no hay calificaciones
- Ejercicio Clases en Java Introduc A La ProgramacionDocumento2 páginasEjercicio Clases en Java Introduc A La ProgramacionKalethistas MonteriaAún no hay calificaciones
- Caracteristicas Del UtpDocumento35 páginasCaracteristicas Del UtpSalvador Osorio50% (6)
- Séptimo Sim Ex Adm UNMSM ASMDocumento20 páginasSéptimo Sim Ex Adm UNMSM ASMranzak uwuAún no hay calificaciones
- PC GamerDocumento4 páginasPC GamerAugustoChotónAlzaAún no hay calificaciones
- Trabajo Final Del CursoDocumento5 páginasTrabajo Final Del CursoCarolay PalaciosAún no hay calificaciones
- PTG-B-CISC 855 Muñoz Zatizabal Henry Xavier, Garcia Salazar Genaro FelipeDocumento186 páginasPTG-B-CISC 855 Muñoz Zatizabal Henry Xavier, Garcia Salazar Genaro FelipeEduar Chambi ApazaAún no hay calificaciones
- Caratula EditarDocumento7 páginasCaratula EditarJosip Palmarez OrdoñezAún no hay calificaciones
- Sem 1Documento17 páginasSem 1Nata AcevedoAún no hay calificaciones
- Comprobante de DomicilioDocumento3 páginasComprobante de DomicilioHaydee BetancourtAún no hay calificaciones
- Caracterizacion Del Proceso EstampadoDocumento1 páginaCaracterizacion Del Proceso EstampadoMadelin Teheran78% (9)
- Aplicaciones Del Georadar de Subsuelo en ObrasDocumento9 páginasAplicaciones Del Georadar de Subsuelo en ObrasArwin TroconisAún no hay calificaciones
- Cuadro Codigo de Etica Equipo #7Documento1 páginaCuadro Codigo de Etica Equipo #7Jesús BarrónAún no hay calificaciones
- 1 PasswordDocumento2 páginas1 PasswordFreddie ChambillaAún no hay calificaciones
- Unidad IIIDocumento24 páginasUnidad IIIAxel Steven Contreras LòpezAún no hay calificaciones
- Igualdad de Oportunidades en El Mundo Digital - DDAADocumento824 páginasIgualdad de Oportunidades en El Mundo Digital - DDAAToni de la Torre100% (1)
- Silabos Telecomunicaciones 2019 PDFDocumento621 páginasSilabos Telecomunicaciones 2019 PDFSherlock BarmellonAún no hay calificaciones
- Cuadro de IncompatibilidadesDocumento3 páginasCuadro de IncompatibilidadesJunior Luizandro Quispe Fernandez100% (1)
- Arranque y ParadaDocumento5 páginasArranque y ParadaBlanqui Vergara GarciaAún no hay calificaciones
- Ejemplos - Sistema ScadaDocumento22 páginasEjemplos - Sistema ScadaFlavio AlxAún no hay calificaciones
- Tesis Corta: Las Plataformas DigitalesDocumento3 páginasTesis Corta: Las Plataformas Digitalesjavier zavalaAún no hay calificaciones
- Paso A PasoDocumento3 páginasPaso A Pasorafa agustAún no hay calificaciones
- Instructivo para El Test de Intereses y Preferencias PersonalesDocumento2 páginasInstructivo para El Test de Intereses y Preferencias PersonalesHatnusen0% (1)
- COM3 U3 S01 Guía Scratch DocenteDocumento6 páginasCOM3 U3 S01 Guía Scratch DocenteMiguel angel de la cruzAún no hay calificaciones
- Building Construction Illustrated by Francis DK Ching PDFDocumento382 páginasBuilding Construction Illustrated by Francis DK Ching PDFraesquivel97% (36)