También podría gustarte
- Problemas Resueltos de Maquinas Electricas - Motores AsincronosDocumento7 páginasProblemas Resueltos de Maquinas Electricas - Motores AsincronosJhoel Quispe Ticona33% (3)
- Yasmin ....Documento5 páginasYasmin ....Jhoel Quispe TiconaAún no hay calificaciones
- Examen Logica MatematicaDocumento12 páginasExamen Logica Matematicagarcpov50% (2)
- Laboratorio Final#2 Control DigitalDocumento13 páginasLaboratorio Final#2 Control DigitalMichel Perez CamargoAún no hay calificaciones
- Informe 9 Grupo 6 PDFDocumento17 páginasInforme 9 Grupo 6 PDFPAUL ESAU NARVAEZ GILERAún no hay calificaciones
- Ep 2022 1Documento3 páginasEp 2022 1ANGELA CAMILA JIMENA BONILLA BRAVOAún no hay calificaciones
- Informe 11 Resonancia - Jesus Angel Quispe SunturaDocumento14 páginasInforme 11 Resonancia - Jesus Angel Quispe SunturaJesus QuispeAún no hay calificaciones
- Ejercicios Lalangui PañiDocumento24 páginasEjercicios Lalangui PañiKEvinLalanGuiAún no hay calificaciones
- Portafolio Final Circuitos 2Documento207 páginasPortafolio Final Circuitos 2jesus2306castilloAún no hay calificaciones
- Unidad I Analisis FrecDocumento33 páginasUnidad I Analisis FrecSimon HernandezAún no hay calificaciones
- J K LDocumento6 páginasJ K LYenny Alexandra Bacca CuasapazAún no hay calificaciones
- 3-.Funciones Vectoriales y Curvas en El EspacioDocumento13 páginas3-.Funciones Vectoriales y Curvas en El EspacioJONATAN ALEX LEIVA BAUTISTAAún no hay calificaciones
- Vector Tangente Normal BinormalDocumento9 páginasVector Tangente Normal BinormalpepeAún no hay calificaciones
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDocumento20 páginasUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriAún no hay calificaciones
- Lectura 6 PDFDocumento13 páginasLectura 6 PDFFerchoGonzalezAún no hay calificaciones
- Lab 01 - SOLDocumento26 páginasLab 01 - SOLAldair Bravo YarlequeAún no hay calificaciones
- Texto Plano 2p - 3s - 1cDocumento6 páginasTexto Plano 2p - 3s - 1cChristopher MateoAún no hay calificaciones
- Ejercicio-Nyquist ControlDocumento5 páginasEjercicio-Nyquist Controlsmith muñozAún no hay calificaciones
- Tarea 2 - Sandoval - VillalobosDocumento11 páginasTarea 2 - Sandoval - VillalobosFELIPE CAMILO SANDOVAL PAINENAún no hay calificaciones
- Mate 3 Practida Dirigida Final PDFDocumento19 páginasMate 3 Practida Dirigida Final PDFMartin AlonsoAún no hay calificaciones
- Tarea 3 - Calculo - Vectorial - Ejercicio - BDocumento14 páginasTarea 3 - Calculo - Vectorial - Ejercicio - BavilezcastrogustavoAún no hay calificaciones
- Solucion P03 - 20230502Documento3 páginasSolucion P03 - 20230502Jose Carlos Jimenez AlburquequeAún no hay calificaciones
- Informe Corriente AlternaDocumento4 páginasInforme Corriente Alternaantony usecheAún no hay calificaciones
- Trabajo N°1 de Electrónica de PotenciaDocumento17 páginasTrabajo N°1 de Electrónica de PotenciaAlex RiveraAún no hay calificaciones
- Practica 1 v1Documento5 páginasPractica 1 v1ANA HUANCAAún no hay calificaciones
- BCMV U3 A2 AdmrDocumento5 páginasBCMV U3 A2 AdmrÂdolfo MenesesAún no hay calificaciones
- República Bolivariana de Venezuela Instituto Universitario Politécnico "Santiago Mariño" Escuela de Ingeniería Eléctrica Extensión MaturínDocumento18 páginasRepública Bolivariana de Venezuela Instituto Universitario Politécnico "Santiago Mariño" Escuela de Ingeniería Eléctrica Extensión Maturínperro locoAún no hay calificaciones
- Verdadero: Tercera Práctica Calificada de Cálculo Diferencial - Bma-01Documento3 páginasVerdadero: Tercera Práctica Calificada de Cálculo Diferencial - Bma-01Murrieta Salvatierra RenzoAún no hay calificaciones
- Derivadas de Funciones VariablesDocumento19 páginasDerivadas de Funciones VariablesPablo GutierrezAún no hay calificaciones
- Solución P5 PDFDocumento5 páginasSolución P5 PDFFiorela ArellanoAún no hay calificaciones
- Paso2 Eduardo SantosDocumento14 páginasPaso2 Eduardo SantosRafael PajaroAún no hay calificaciones
- Vibraciones y Ondas (UNED) - PED 2022Documento13 páginasVibraciones y Ondas (UNED) - PED 2022Santiago Anarcoiris HerederoAún no hay calificaciones
- Sef Ee615m-N 2019-1Documento7 páginasSef Ee615m-N 2019-1Jorge Luis Espinoza BardalesAún no hay calificaciones
- 121 Tarea2Documento23 páginas121 Tarea2yordy javier saavedra castañedaAún no hay calificaciones
- INFORMEDocumento9 páginasINFORMEAron P Barrios DuranAún no hay calificaciones
- Unidad 3 Cálculo Vectorial Funciones Vectoriales de Una Variable Real.Documento32 páginasUnidad 3 Cálculo Vectorial Funciones Vectoriales de Una Variable Real.Jennifer Zazueta100% (1)
- Curvatura de Una CurvaDocumento8 páginasCurvatura de Una CurvaAndrés HernándezAún no hay calificaciones
- Resolución Examen Parcial 2 Evaluación (Trigonometría) : Cos 30º 8 X 8 Cos 30º 9,24 CMDocumento2 páginasResolución Examen Parcial 2 Evaluación (Trigonometría) : Cos 30º 8 X 8 Cos 30º 9,24 CMEloy RAún no hay calificaciones
- Ejercicios Resueltos Campo y Potencial ElectricoDocumento17 páginasEjercicios Resueltos Campo y Potencial ElectricoPascual D MP100% (3)
- Sistemas en Dominio de La FrecuenciaDocumento33 páginasSistemas en Dominio de La FrecuenciaCarlos HuarcayaAún no hay calificaciones
- Derivada de Una Función VectorialDocumento7 páginasDerivada de Una Función VectorialAndrés Hernández100% (1)
- Examen Parcial Pasado1Documento9 páginasExamen Parcial Pasado1Robinson Castillejo CamposAún no hay calificaciones
- Tarea1 Grupo 203042 91Documento26 páginasTarea1 Grupo 203042 91jarolAún no hay calificaciones
- METODO GENERAL DE DISCRETIZACION c2d MatlabDocumento10 páginasMETODO GENERAL DE DISCRETIZACION c2d MatlabFranzum MamaniAún no hay calificaciones
- 3 TallerDocumento8 páginas3 TallerDanilo LopezAún no hay calificaciones
- Parcial 4 Sem 2023-03 SolucionDocumento7 páginasParcial 4 Sem 2023-03 Soluciondeinerale2004Aún no hay calificaciones
- Ep 2022 2Documento2 páginasEp 2022 2vieriquinte123Aún no hay calificaciones
- Solucionario Ep MB536 2022 2Documento8 páginasSolucionario Ep MB536 2022 2Alfredo FloresAún no hay calificaciones
- Curvas - Parametrizaciones-Recta TangenteDocumento9 páginasCurvas - Parametrizaciones-Recta TangenteIsabel Cristina Perez MatuteAún no hay calificaciones
- Examen AplazadoDocumento6 páginasExamen AplazadoRoy MezaAún no hay calificaciones
- CV PD 14 SolucionarioDocumento11 páginasCV PD 14 SolucionariosolAún no hay calificaciones
- Laboratorio 2 MUR.Documento4 páginasLaboratorio 2 MUR.migueroballoAún no hay calificaciones
- JoséRamírez Tarea1Documento5 páginasJoséRamírez Tarea1pruebapruebaprueba03Aún no hay calificaciones
- MÉTODOS Lab N° 7Documento8 páginasMÉTODOS Lab N° 7NOEMI SANDRA ESTEBAN SANTIAGOAún no hay calificaciones
- Taller RL y RF - Sandy Carrera AltamiranoDocumento11 páginasTaller RL y RF - Sandy Carrera AltamiranoJacoboRosasGonzalezAún no hay calificaciones
- Primer Parcial de Analsis Resueltos Por AceroDocumento2 páginasPrimer Parcial de Analsis Resueltos Por AceroCarlos Anselmo100% (2)
- Vivienda UnifilarDocumento1 páginaVivienda UnifilarJhoel Quispe TiconaAún no hay calificaciones
- Proyecto de Cancha DeportivaDocumento1 páginaProyecto de Cancha DeportivaJhoel Quispe TiconaAún no hay calificaciones
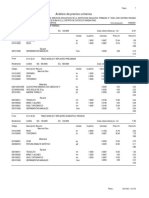
- 001 Plataforma Deportiva APUDocumento6 páginas001 Plataforma Deportiva APUJhoel Quispe TiconaAún no hay calificaciones
- Practica 1 - Wilder Jhoel Quispe TiconaDocumento1 páginaPractica 1 - Wilder Jhoel Quispe TiconaJhoel Quispe TiconaAún no hay calificaciones
- Primer Examen Parcial de Sistemas de Potencia 2021 - IDocumento2 páginasPrimer Examen Parcial de Sistemas de Potencia 2021 - IJhoel Quispe TiconaAún no hay calificaciones
- 745-Texto Del Artículo-3014-1-10-20210405Documento13 páginas745-Texto Del Artículo-3014-1-10-20210405Jhoel Quispe TiconaAún no hay calificaciones
- Proyecto - Unap-2021Documento2 páginasProyecto - Unap-2021Jhoel Quispe TiconaAún no hay calificaciones
- BibliografíaDocumento1 páginaBibliografíaJhoel Quispe TiconaAún no hay calificaciones
- Arranque Estrella TrianguloDocumento1 páginaArranque Estrella TrianguloJhoel Quispe TiconaAún no hay calificaciones
- Calcular La Potencia Necesaria en El TransformadorDocumento1 páginaCalcular La Potencia Necesaria en El TransformadorJhoel Quispe TiconaAún no hay calificaciones
- Inversión de Giro de Un Motor TrifásicoDocumento1 páginaInversión de Giro de Un Motor TrifásicoJhoel Quispe TiconaAún no hay calificaciones
- Winch Electrico KDJ 300EDocumento2 páginasWinch Electrico KDJ 300EJhoel Quispe TiconaAún no hay calificaciones
- 2do Examen de Turbomaquinas 2021Documento2 páginas2do Examen de Turbomaquinas 2021Jhoel Quispe TiconaAún no hay calificaciones
- Examen Sustitutorio Maquinas Electricas Ii - 2021...Documento1 páginaExamen Sustitutorio Maquinas Electricas Ii - 2021...Jhoel Quispe TiconaAún no hay calificaciones
- CV Wilder JhoelDocumento2 páginasCV Wilder JhoelJhoel Quispe TiconaAún no hay calificaciones
- Informe de Las Turbinas Pelton Y FrancisDocumento30 páginasInforme de Las Turbinas Pelton Y FrancisJhoel Quispe TiconaAún no hay calificaciones
- ArchivoDocumento16 páginasArchivoJhoel Quispe TiconaAún no hay calificaciones
- Evaluacion Primero Periodo - Grado SeptimoDocumento3 páginasEvaluacion Primero Periodo - Grado SeptimoGalvacom PorvenirAún no hay calificaciones
- G3C - 5.2 Núcleo e Imagen de Una Transformación Lineal.Documento13 páginasG3C - 5.2 Núcleo e Imagen de Una Transformación Lineal.Daniel CisnerosAún no hay calificaciones
- Musica - Guia Monografia 2013Documento7 páginasMusica - Guia Monografia 2013alexandherreraAún no hay calificaciones
- Números RacionalesDocumento90 páginasNúmeros RacionalesvaleriaxzAún no hay calificaciones
- Taller de Programacion EnteraDocumento8 páginasTaller de Programacion EnteraHamilton MtzAún no hay calificaciones
- Ficha de Reforzamiento Matemàtica 5to Sec. IvbDocumento1 páginaFicha de Reforzamiento Matemàtica 5to Sec. IvbAdrhiam Zamorano V.Aún no hay calificaciones
- Trapping in Self-Avoiding Walks With Nearest-Neighbor Attraction - En.esDocumento9 páginasTrapping in Self-Avoiding Walks With Nearest-Neighbor Attraction - En.espldojcc ccAún no hay calificaciones
- TR 1Documento15 páginasTR 1Emerson CayoAún no hay calificaciones
- 28 - 6to de Primaria UE MARIA INMACULADADocumento11 páginas28 - 6to de Primaria UE MARIA INMACULADACarlos Antonio HuancaAún no hay calificaciones
- Alumno ReporteDocumento1 páginaAlumno ReporteJuárez Manríquez María DanielaAún no hay calificaciones
- Apresto NuméricoDocumento8 páginasApresto NuméricoCamila Alexandra Navarro SanchezAún no hay calificaciones
- 3 - ORGANIZACION DE DATOS - TABULACION - DIAGRAMAS - Parte2Documento57 páginas3 - ORGANIZACION DE DATOS - TABULACION - DIAGRAMAS - Parte2Victor JidAún no hay calificaciones
- Ejercicio 4Documento2 páginasEjercicio 4julieth gaviriaAún no hay calificaciones
- Alren G M8 U4Documento8 páginasAlren G M8 U4Diego AcAún no hay calificaciones
- Límite y ContinuidadDocumento41 páginasLímite y ContinuidadCristóbal NúñezAún no hay calificaciones
- 103-148 Unidad 3 - 1ºDocumento46 páginas103-148 Unidad 3 - 1ºDAMARIS SULCAAún no hay calificaciones
- Guia Matematicas Grado 9º Tercer Periodo 2021Documento15 páginasGuia Matematicas Grado 9º Tercer Periodo 2021esteban garciaAún no hay calificaciones
- ConsultaDocumento5 páginasConsultaGisela Murgas Zuleta100% (1)
- Tesis de Placas y CascarasDocumento162 páginasTesis de Placas y CascarasjmiguelmenaAún no hay calificaciones
- Artmetica 6° IDocumento255 páginasArtmetica 6° ICarlos LariosAún no hay calificaciones
- Lira Muñoz Yael, Definición de CienciaDocumento2 páginasLira Muñoz Yael, Definición de CienciaLira Muñoz Yael AlbertoAún no hay calificaciones
- Una Persona Tiene 368 Soles y La Otra 256 SolesDocumento5 páginasUna Persona Tiene 368 Soles y La Otra 256 SolesArthur Reyes GuevaraAún no hay calificaciones
- Taller Uno Formato BDocumento2 páginasTaller Uno Formato BFelipe Ignacio Duran VargasAún no hay calificaciones
- S03-Ecuaciones e Inecuaciones.Documento32 páginasS03-Ecuaciones e Inecuaciones.VICTOR MANUEL CARLOS GARCIAAún no hay calificaciones
- Repaso RM 1Documento11 páginasRepaso RM 1Richard Denilzo RamirezAún no hay calificaciones
- Resumen IccDocumento52 páginasResumen IccFlorencia GarciaAún no hay calificaciones
- Taller 1-6015-Grupo 5Documento14 páginasTaller 1-6015-Grupo 5Cristian Paúl Casa QuinatoaAún no hay calificaciones
- Informe MatricesDocumento10 páginasInforme Matriceseduard jhon vasquez quintosAún no hay calificaciones
- Producto PuntoDocumento8 páginasProducto Puntocristiansaigua11Aún no hay calificaciones