También podría gustarte
- Hipno - LovecraftDocumento11 páginasHipno - LovecraftSamantha Mejia100% (1)
- Mapa Conceptual ARHDocumento3 páginasMapa Conceptual ARHJimmy Anderson Huaman Llanos100% (1)
- PDF de La Antigua California Al Desierto de Atacama DLDocumento152 páginasPDF de La Antigua California Al Desierto de Atacama DLEryen FernandaAún no hay calificaciones
- Gustavo Adolfo Becquer - RimasDocumento38 páginasGustavo Adolfo Becquer - RimasCristian SalamancaAún no hay calificaciones
- Presentación Paneles SolaresDocumento5 páginasPresentación Paneles SolaresgiovanniAún no hay calificaciones
- Juan Carlos Lopez 11-1 Fisica 5Documento2 páginasJuan Carlos Lopez 11-1 Fisica 5Juan Carlos LopezAún no hay calificaciones
- 5.-Educación y Medios La Incidencia de Las Mediatizaciones en Las Formas de Conocer y EnseñarDocumento15 páginas5.-Educación y Medios La Incidencia de Las Mediatizaciones en Las Formas de Conocer y EnseñarWashingtonAún no hay calificaciones
- Propuesta de Tesis Doctoral-EspDocumento6 páginasPropuesta de Tesis Doctoral-EspYogeiris MedinaAún no hay calificaciones
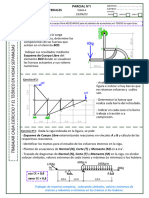
- Dibujo Mecanico Ii Examen Parcial 19-Mayo-2017Documento9 páginasDibujo Mecanico Ii Examen Parcial 19-Mayo-2017Wilder Fernando Vilca OreAún no hay calificaciones
- Plantilla DeshidratadoraDocumento7 páginasPlantilla DeshidratadoraGema del CarmenAún no hay calificaciones
- Articulo - Nuevos Perros, Los Mismos Collares-La Introduccion de Los Cachorros en La Casa.Documento6 páginasArticulo - Nuevos Perros, Los Mismos Collares-La Introduccion de Los Cachorros en La Casa.Lina PVAún no hay calificaciones
- Proyecto Aulas ConflictivasDocumento46 páginasProyecto Aulas ConflictivasPascualClementeAlonsoAún no hay calificaciones
- Violencia en El Lugar de TrabajoDocumento23 páginasViolencia en El Lugar de TrabajoEstefaníaAún no hay calificaciones
- Antecedente 2Documento29 páginasAntecedente 2Angie Melissa Osorio GomezAún no hay calificaciones
- Informe Rsu FinalDocumento42 páginasInforme Rsu FinalRafael Antonio Vilcherres LopezAún no hay calificaciones
- Capitulo IVDocumento54 páginasCapitulo IVmiriandelcarmenAún no hay calificaciones
- 1er P 2023 - Tema A Con SOLUCIONDocumento4 páginas1er P 2023 - Tema A Con SOLUCIONmaxmall 1Aún no hay calificaciones
- Temario para Examen de Suficiencia Dº Inmobiliario Reg.Documento8 páginasTemario para Examen de Suficiencia Dº Inmobiliario Reg.Esteban ValleAún no hay calificaciones
- Tarea 7,8,9Documento21 páginasTarea 7,8,9Edwin Leon VasquezAún no hay calificaciones
- Ensayo EscuelasDocumento4 páginasEnsayo EscuelasCristian PovedaAún no hay calificaciones
- QFD EjemploDocumento12 páginasQFD EjemploKEVIN ARNOLD GUEVARA TUMBAJULCAAún no hay calificaciones
- La Educación Física y El Deporte en La Escuela en-EC3013469ESNDocumento4 páginasLa Educación Física y El Deporte en La Escuela en-EC3013469ESNMacarenaAún no hay calificaciones
- LIDERAZGODocumento30 páginasLIDERAZGOhenryAún no hay calificaciones
- Tarea 1, Ciencias Sociales.Documento8 páginasTarea 1, Ciencias Sociales.marcosvidart28Aún no hay calificaciones
- Memorias - HyD Gerenciales - ULIBRE 2016-2Documento4 páginasMemorias - HyD Gerenciales - ULIBRE 2016-2SintecontaAún no hay calificaciones
- Balbín Molina, José Antonio TesisDocumento202 páginasBalbín Molina, José Antonio TesisAlex PorteroAún no hay calificaciones
- Salas 2019Documento2 páginasSalas 2019mirela MariateguiAún no hay calificaciones
- Ensayo Sobre Trabajos Con Tensión y Sin TensiónDocumento4 páginasEnsayo Sobre Trabajos Con Tensión y Sin TensiónGabriel TobarAún no hay calificaciones
- Paso - 1 - Reconocimiento de Presaberes.Documento7 páginasPaso - 1 - Reconocimiento de Presaberes.Mich Gil G.Aún no hay calificaciones
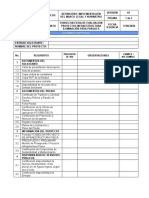
- Anexo 9. Fonsecon Ficha de Evaluacion Proyectos Infraestructura Iluminacion para ParquesDocumento2 páginasAnexo 9. Fonsecon Ficha de Evaluacion Proyectos Infraestructura Iluminacion para ParquesfanyAún no hay calificaciones