También podría gustarte
- Interpretación de planos en la fabricación de tuberías. FMEC0108De EverandInterpretación de planos en la fabricación de tuberías. FMEC0108Calificación: 1 de 5 estrellas1/5 (1)
- Ondasmecanicas2 101029150422 Phpapp01Documento21 páginasOndasmecanicas2 101029150422 Phpapp01fredirevAún no hay calificaciones
- Composición Rectangular en El PlanoDocumento2 páginasComposición Rectangular en El PlanoPercy PérezAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa ConceptualYina Vanesa Gonzales RivasAún no hay calificaciones
- Mapa Conceptual Modelo Cantidad Eoq PedidooDocumento1 páginaMapa Conceptual Modelo Cantidad Eoq PedidooAngie Florez Gonzalez100% (1)
- Graficar Funciones Raíz CuadradaDocumento9 páginasGraficar Funciones Raíz CuadradaedwinAún no hay calificaciones
- Mapa Conceptual DiferencialesDocumento2 páginasMapa Conceptual DiferencialesPaola BellakaAún no hay calificaciones
- Taller IntroducciónDocumento3 páginasTaller IntroducciónMariaFernandaAcevedoOrtizAún no hay calificaciones
- Quiz Unidad 2Documento7 páginasQuiz Unidad 2Willington ReyAún no hay calificaciones
- Diagrama TDocumento4 páginasDiagrama TWlâdïimir CándöAún no hay calificaciones
- Pruebas Estadisticas No ParametricasDocumento4 páginasPruebas Estadisticas No ParametricasFELIX FARFANAún no hay calificaciones
- Cuadro Sinóptico Probabilidad - Cuadro Sinóptico en BlancoDocumento1 páginaCuadro Sinóptico Probabilidad - Cuadro Sinóptico en BlancoMARIA FERNANDA CASTELLANOS RODRIGUEZAún no hay calificaciones
- Cuadro de 4 Entradas de Organizacion y Admon Escolar.Documento2 páginasCuadro de 4 Entradas de Organizacion y Admon Escolar.fermangtAún no hay calificaciones
- Proyecto Parcial BLOQUE IVDocumento32 páginasProyecto Parcial BLOQUE IVKatia CamposAún no hay calificaciones
- Transmision AnalogicaDocumento6 páginasTransmision AnalogicaFernando CofeliceAún no hay calificaciones
- Actividad 1. Segundo Bimestre ABCDocumento2 páginasActividad 1. Segundo Bimestre ABCRoberto PiuriAún no hay calificaciones
- Algebra Ejercicios 100Documento4 páginasAlgebra Ejercicios 100cristhianAún no hay calificaciones
- Regresión Lineal MúltipleDocumento1 páginaRegresión Lineal MúltipleMARIANA LAMBAREN SOSAAún no hay calificaciones
- Triptico Diagrama de ParetoDocumento2 páginasTriptico Diagrama de ParetonaiAún no hay calificaciones
- S03 - PPT Método Simplex - MaximizaciónDocumento22 páginasS03 - PPT Método Simplex - MaximizaciónImer Rodríguez GuevaraAún no hay calificaciones
- Unidad 3-Trabajo, Potencia y Energía PARTE IIIDocumento6 páginasUnidad 3-Trabajo, Potencia y Energía PARTE IIIkarina huayhua0% (1)
- Informe LOTDocumento18 páginasInforme LOTJonathan MeraAún no hay calificaciones
- 2 SumativaDocumento4 páginas2 SumativaMaría GuevaraAún no hay calificaciones
- Exposicion Funciones Cuadratica SDocumento10 páginasExposicion Funciones Cuadratica SJohn HilasacaAún no hay calificaciones
- Infografia FinalDocumento1 páginaInfografia FinalGabriel RomeroAún no hay calificaciones
- Capitulo II. Como Elaborar El Marco Teorico.Documento1 páginaCapitulo II. Como Elaborar El Marco Teorico.Tesis y MonograficosAún no hay calificaciones
- Segunda Generación de La RobóticaDocumento5 páginasSegunda Generación de La Robóticadiana dazaAún no hay calificaciones
- Mapa Conceptual de Estadística InferencialDocumento1 páginaMapa Conceptual de Estadística InferencialLuisAún no hay calificaciones
- 1.3 Infografía Clasificación de Sistemas de ProducciónDocumento1 página1.3 Infografía Clasificación de Sistemas de ProducciónAlicia García100% (1)
- 3 Trabajo y EnergiaDocumento61 páginas3 Trabajo y EnergiaAnita GutiérrezAún no hay calificaciones
- Tipos de EstadisticaDocumento4 páginasTipos de EstadisticaMiky EstefyAún no hay calificaciones
- CLASE1 - Exponentes Páginas 1 9 PDFDocumento9 páginasCLASE1 - Exponentes Páginas 1 9 PDFJosvellSaintclairAún no hay calificaciones
- Cuadro Sinóptico Funciones MatemáticasDocumento28 páginasCuadro Sinóptico Funciones MatemáticasSandra Rocío Rodríguez AcostaAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa ConceptualWilder Fabian BaqueroAún no hay calificaciones
- Numeros ComplejosDocumento16 páginasNumeros ComplejosFelipe AndreauAún no hay calificaciones
- InfografiaDocumento1 páginaInfografiaIsrael De La TorreAún no hay calificaciones
- Componente Práctico MatesDocumento18 páginasComponente Práctico Mates310716gkmp100% (1)
- Visión Esquemática Del Proceso de InvestigaciónDocumento1 páginaVisión Esquemática Del Proceso de InvestigaciónJosué Rodriguez0% (1)
- Coeficiente de CurtosisDocumento3 páginasCoeficiente de CurtosispamelaAún no hay calificaciones
- Lenguaje y Pensamiento. A. A. Smirnov, S. L. Rubinstein, A. N. Leontiev y B. M. TieplovDocumento76 páginasLenguaje y Pensamiento. A. A. Smirnov, S. L. Rubinstein, A. N. Leontiev y B. M. TieplovMaye GarcíaAún no hay calificaciones
- Infografia de MatricesDocumento1 páginaInfografia de Matricesmichell pomacarhua asto100% (1)
- Conceptos-Basicos EstadisticaDocumento4 páginasConceptos-Basicos Estadisticadeiver garciaAún no hay calificaciones
- Definición y Clasificación de VariablesDocumento5 páginasDefinición y Clasificación de VariablesRey EsAún no hay calificaciones
- Indicadores HTDocumento1 páginaIndicadores HTKarla Cabrera Soeth RivasAún no hay calificaciones
- Problemario de Probabilidad y EstadisticaDocumento4 páginasProblemario de Probabilidad y Estadisticamariachi sangre mexicanaAún no hay calificaciones
- Métodos de Localización de Planta - Ingeniería IndustrialDocumento6 páginasMétodos de Localización de Planta - Ingeniería IndustrialarnaldodsAún no hay calificaciones
- Cuadro ComparativoDocumento1 páginaCuadro ComparativoZoiila HernandezAún no hay calificaciones
- Infografia Medidas y EscalasDocumento2 páginasInfografia Medidas y EscalasMario Jimenez100% (1)
- Base OrtonormalDocumento10 páginasBase OrtonormalJennifer Estrella Verdin SanchezAún no hay calificaciones
- Mapa Conceptual Clasificacion Sistemas PDFDocumento2 páginasMapa Conceptual Clasificacion Sistemas PDFCristóbal LeonelAún no hay calificaciones
- Mapa Conceptual de Las FuncionesDocumento1 páginaMapa Conceptual de Las FuncionesANGELICA MARIA GUZMAN VALLEAún no hay calificaciones
- Aula Virtual de Física 4to Año NivelacionDocumento12 páginasAula Virtual de Física 4to Año NivelacionGonzález Tiapa ValeriaAún no hay calificaciones
- 1.9 Programa de Actividades, Calendarización y Presupuesto SolicitadoDocumento1 página1.9 Programa de Actividades, Calendarización y Presupuesto SolicitadoHildeberto CortinaAún no hay calificaciones
- Act1-Estadistica DescriptivaDocumento13 páginasAct1-Estadistica DescriptivaJORGE AGUILERAAún no hay calificaciones
- Silabo Estadistica General - 2021-IiDocumento8 páginasSilabo Estadistica General - 2021-IiKamila Almanza AchahuiAún no hay calificaciones
- Trabajo de Investigación 4Documento5 páginasTrabajo de Investigación 4Jose Ignacio FloresAún no hay calificaciones
- Cuadro Sinóptico Diseños de InvestigaciónDocumento2 páginasCuadro Sinóptico Diseños de InvestigaciónLibeanAún no hay calificaciones
- Graficas de MasonDocumento8 páginasGraficas de MasonJulio ValverdeAún no hay calificaciones
- Flujos de Señal en Sistemas de Control ModernoDocumento9 páginasFlujos de Señal en Sistemas de Control ModernoEduardo Lopez AntonioAún no hay calificaciones
- Diagrama de Flujo de SeñalDocumento24 páginasDiagrama de Flujo de SeñalJoffre CalleAún no hay calificaciones
- CaratulaDocumento1 páginaCaratulaDavid Isaac Ruiz ChaconAún no hay calificaciones
- Evidencias Laboratorio NDocumento2 páginasEvidencias Laboratorio NDavid Isaac Ruiz ChaconAún no hay calificaciones
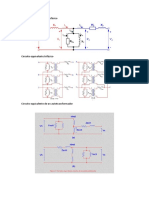
- Circuitos Equivalentes de TransformadoresDocumento1 páginaCircuitos Equivalentes de TransformadoresDavid Isaac Ruiz ChaconAún no hay calificaciones
- Equemasrealesdetrnasformador RUIZDocumento3 páginasEquemasrealesdetrnasformador RUIZDavid Isaac Ruiz ChaconAún no hay calificaciones
- Ensayos 2Documento1 páginaEnsayos 2David Isaac Ruiz ChaconAún no hay calificaciones
- Control de Sistemas DiscretosDocumento174 páginasControl de Sistemas Discretosflores floresAún no hay calificaciones
- Centrales MiltonQuimbitaDocumento4 páginasCentrales MiltonQuimbitaDavid Isaac Ruiz ChaconAún no hay calificaciones
- Evidencias Laboratorio NDocumento2 páginasEvidencias Laboratorio NDavid Isaac Ruiz ChaconAún no hay calificaciones
- Transformada Discreta CosenoDocumento8 páginasTransformada Discreta CosenoDavid Isaac Ruiz ChaconAún no hay calificaciones
- Departamento de Eléctrica Y Electrónica Carrera de Ing. en Electrónica E InstrumentaciónDocumento6 páginasDepartamento de Eléctrica Y Electrónica Carrera de Ing. en Electrónica E InstrumentaciónDavid Isaac Ruiz ChaconAún no hay calificaciones
- Mi Parte SsmecanicoDocumento1 páginaMi Parte SsmecanicoDavid Isaac Ruiz ChaconAún no hay calificaciones
- Informe 3.1 DRuiz PDFDocumento9 páginasInforme 3.1 DRuiz PDFDavid Isaac Ruiz ChaconAún no hay calificaciones
- Ejer2 8Documento2 páginasEjer2 8David Isaac Ruiz ChaconAún no hay calificaciones
- Componentes Sistemas ControlDocumento12 páginasComponentes Sistemas ControlDavid Isaac Ruiz ChaconAún no hay calificaciones
- ConclusionDocumento1 páginaConclusionDavid Isaac Ruiz ChaconAún no hay calificaciones
- Conexiones Tranfomadores DRUIZDocumento3 páginasConexiones Tranfomadores DRUIZDavid Isaac Ruiz ChaconAún no hay calificaciones
- Deber 2.1 DRuizDocumento4 páginasDeber 2.1 DRuizDavid Isaac Ruiz ChaconAún no hay calificaciones
- Informe 1.1 DRUIZDocumento10 páginasInforme 1.1 DRUIZDavid Isaac Ruiz ChaconAún no hay calificaciones
- Druiz Guia 4Documento7 páginasDruiz Guia 4David Isaac Ruiz ChaconAún no hay calificaciones
- ContDocumento2 páginasContDavid Isaac Ruiz ChaconAún no hay calificaciones
- Informe 3.1 DRuiz PDFDocumento9 páginasInforme 3.1 DRuiz PDFDavid Isaac Ruiz ChaconAún no hay calificaciones
- Manejo GLCDDocumento6 páginasManejo GLCDDavid Isaac Ruiz ChaconAún no hay calificaciones
- Hoja de DatosDocumento2 páginasHoja de DatosDavid Isaac Ruiz ChaconAún no hay calificaciones
- DRuiz Informe 1.1Documento13 páginasDRuiz Informe 1.1David Isaac Ruiz ChaconAún no hay calificaciones
- Tarea1 RUIZ DAVIDDocumento2 páginasTarea1 RUIZ DAVIDDavid Isaac Ruiz ChaconAún no hay calificaciones
- 0 FuturosDocumento2 páginas0 FuturosDavid Isaac Ruiz ChaconAún no hay calificaciones
- Diagramas de FlujoDocumento12 páginasDiagramas de FlujoDavid Isaac Ruiz ChaconAún no hay calificaciones
- Malla Cea 201810Documento6 páginasMalla Cea 201810David Isaac Ruiz ChaconAún no hay calificaciones
- Minimos Cuadrados DRuizDocumento9 páginasMinimos Cuadrados DRuizDavid Isaac Ruiz ChaconAún no hay calificaciones
- Curso IDANISDocumento2 páginasCurso IDANISluis barrigaAún no hay calificaciones
- Informe Inecuaciones Q 1.2Documento9 páginasInforme Inecuaciones Q 1.2nixnixnix100% (1)
- Matematica 1 CINU. Ricardo ZamoraDocumento30 páginasMatematica 1 CINU. Ricardo Zamoraricardo javier zamora rengifoAún no hay calificaciones
- Libro Problemas MMAIDocumento123 páginasLibro Problemas MMAIGabriel García NarockiAún no hay calificaciones
- Apuntes Métodos MatemáticosDocumento11 páginasApuntes Métodos MatemáticosKaren SaenzAún no hay calificaciones
- Triángulos RectángulosDocumento11 páginasTriángulos RectángulosCesar SantiagoAún no hay calificaciones
- Taller 1 Calculo IntegralDocumento3 páginasTaller 1 Calculo IntegralSebastián RojasAún no hay calificaciones
- EXAMEN T1 23 1variables BDocumento5 páginasEXAMEN T1 23 1variables BDavid MegaAún no hay calificaciones
- MCCSS T1 2016 PDFDocumento8 páginasMCCSS T1 2016 PDFCristinaPinoBodasAún no hay calificaciones
- Ecuaciones Diferenciales Videos Transformada de LaplaceDocumento3 páginasEcuaciones Diferenciales Videos Transformada de LaplacecarmenAún no hay calificaciones
- ViasDocumento7 páginasViasMauroCarrilloOzunaAún no hay calificaciones
- 3 ARITMÉTICA (13 - 17) 5 SecDocumento46 páginas3 ARITMÉTICA (13 - 17) 5 Sec'Jose Antonio AguilarAún no hay calificaciones
- Integración Por PartesDocumento3 páginasIntegración Por PartesRomario RodriguezAún no hay calificaciones
- Operaciones en ZDocumento18 páginasOperaciones en ZVERITOAún no hay calificaciones
- Artimética 1roDocumento230 páginasArtimética 1roKatherine Otero100% (1)
- Potencias-2º-ESO APOYO AlumnosDocumento2 páginasPotencias-2º-ESO APOYO AlumnosAlvaro AragonAún no hay calificaciones
- Fase 4. Daniel Leiva Literal CDocumento15 páginasFase 4. Daniel Leiva Literal Cdaniel leyva100% (1)
- Operaciones Entre FuncionesDocumento6 páginasOperaciones Entre FuncionesLuciano RosalesAún no hay calificaciones
- Rodolfo AnaliticaDocumento454 páginasRodolfo AnaliticaJohan OspinaAún no hay calificaciones
- Guia Racionales 7Documento8 páginasGuia Racionales 7margarita1979Aún no hay calificaciones
- Operaciones Con ConjuntosDocumento16 páginasOperaciones Con ConjuntosJulio Cesar Avila MossoAún no hay calificaciones
- 916-Módulo 2 - ÁlgebraDocumento15 páginas916-Módulo 2 - Álgebraagu31036Aún no hay calificaciones
- Practica 8 XXXXXXDocumento2 páginasPractica 8 XXXXXXJAún no hay calificaciones
- Taller #14-Gráficas Sencillas Con MatlabDocumento8 páginasTaller #14-Gráficas Sencillas Con MatlabBYRON MIGUEL RAMIREZ NASTACUASAún no hay calificaciones
- Newton Raphson Ecuaciones No LinealesDocumento19 páginasNewton Raphson Ecuaciones No Linealesjota jotaAún no hay calificaciones
- Guia Racionalización 2019 2do MedioDocumento7 páginasGuia Racionalización 2019 2do MedioestelaAún no hay calificaciones
- Guia 1 - Sistemas de Ecuaciones - MetodosDocumento10 páginasGuia 1 - Sistemas de Ecuaciones - MetodosBJR destrodAún no hay calificaciones
- Tema 7Documento4 páginasTema 7Chavez SergioAún no hay calificaciones
- Seminario para El Examen Parcial 2019 2Documento3 páginasSeminario para El Examen Parcial 2019 2JoselineAún no hay calificaciones
- Juegos MatemáticosDocumento20 páginasJuegos MatemáticosCarlos AlvarezAún no hay calificaciones