También podría gustarte
- Wuolah Free NotasTema2unlockedDocumento36 páginasWuolah Free NotasTema2unlockedCeçar J. Newton LAún no hay calificaciones
- Wuolah Free Tema1Documento16 páginasWuolah Free Tema1Ceçar J. Newton LAún no hay calificaciones
- Wuolah Free NotasTema4unlockedDocumento10 páginasWuolah Free NotasTema4unlockedCeçar J. Newton LAún no hay calificaciones
- Wuolah Free Tema3Documento14 páginasWuolah Free Tema3Ceçar J. Newton LAún no hay calificaciones
- Wuolah Free Entregable2ResueltoDocumento3 páginasWuolah Free Entregable2ResueltoCeçar J. Newton LAún no hay calificaciones
- Problemas para ResolverDocumento1 páginaProblemas para ResolverCeçar J. Newton LAún no hay calificaciones
- Wuolah Free EjerciciosMC2SolucionesDocumento18 páginasWuolah Free EjerciciosMC2SolucionesCeçar J. Newton LAún no hay calificaciones
- Conceptos EntrevistaDocumento3 páginasConceptos EntrevistaGómez Torres Javier JesúsAún no hay calificaciones
- Catalogo V Setiembre 2020Documento35 páginasCatalogo V Setiembre 2020JoE Albujar TantaAún no hay calificaciones
- Caso TopitopDocumento4 páginasCaso TopitopPatricia GutierrezAún no hay calificaciones
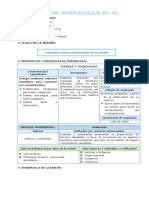
- SESION MODELO - Cyt 6°Documento4 páginasSESION MODELO - Cyt 6°ALFREDO LUNA MADARIAGAAún no hay calificaciones
- Supuesto TecnologiaDocumento3 páginasSupuesto TecnologiaJaviAún no hay calificaciones
- Perla 340035864 Entregable1Documento5 páginasPerla 340035864 Entregable1Aq0916502Aún no hay calificaciones
- PARADIGMA COMPLEJO, TEORÍA DE LOS SISTEMAS (Bozán INAF)Documento18 páginasPARADIGMA COMPLEJO, TEORÍA DE LOS SISTEMAS (Bozán INAF)Eduardo BarahonaAún no hay calificaciones
- U 3 - B - Aplicaciones - Leyes - de - NewtonDocumento3 páginasU 3 - B - Aplicaciones - Leyes - de - NewtonJere GxAún no hay calificaciones
- Unidad Ii La ParticionDocumento63 páginasUnidad Ii La Particionfatima perezAún no hay calificaciones
- Plan de Seguridad AlimentariaDocumento3 páginasPlan de Seguridad AlimentariaNorayma Maria García ParadaAún no hay calificaciones
- Amparo Directo en Revisión Derecho FamiliarDocumento59 páginasAmparo Directo en Revisión Derecho Familiar2963-PAULINA MONSERRAT KANTUN CUEVASAún no hay calificaciones
- Contrato de Concesión para La Explotacion Del Pool BarDocumento17 páginasContrato de Concesión para La Explotacion Del Pool BarjoseAún no hay calificaciones
- Reglamento CIRSOC 302 - Julio 2005 PDFDocumento115 páginasReglamento CIRSOC 302 - Julio 2005 PDFGonzalo Abarca100% (1)
- INMUNIZACIÓN EN NIÑOS MENORES DE 5 AÑOS FinalDocumento20 páginasINMUNIZACIÓN EN NIÑOS MENORES DE 5 AÑOS FinalDianita Cruz CastroAún no hay calificaciones
- Diseño de CunetasDocumento6 páginasDiseño de CunetasalexanderAún no hay calificaciones
- Identidad Benedicto XVIDocumento40 páginasIdentidad Benedicto XVIInmer ValentinAún no hay calificaciones
- Cuestionario Semana 4Documento8 páginasCuestionario Semana 4Jenniffer GonzálezAún no hay calificaciones
- Cascada y Avanacción Power PDocumento34 páginasCascada y Avanacción Power PGon Negro AlfredAún no hay calificaciones
- Guias de Trabajo MatematicasDocumento5 páginasGuias de Trabajo MatematicasLiliana SanabriaAún no hay calificaciones
- Mejoramiento Genético Participativo Lectura 1 - B2020Documento6 páginasMejoramiento Genético Participativo Lectura 1 - B2020ANGIE LORENA PENA DIAZAún no hay calificaciones
- IntroduccionDocumento12 páginasIntroduccionCesar Romero AriasAún no hay calificaciones
- 34 Hidalgo Apicola VFDocumento54 páginas34 Hidalgo Apicola VFCely San JuanAún no hay calificaciones
- Métodos para Calcular La Poblacion FuturaDocumento8 páginasMétodos para Calcular La Poblacion FuturaDante C. Marca100% (1)
- Manual de Mac 101 - BásicoDocumento85 páginasManual de Mac 101 - BásicoJesus Ruiz100% (1)
- Metodología de La Didáctica TecnológicaDocumento23 páginasMetodología de La Didáctica TecnológicaDonna LopAún no hay calificaciones
- Interpretación NotamsDocumento1 páginaInterpretación NotamsSammy Anthony Chavez MacedoAún no hay calificaciones
- Prueba de SensorDocumento10 páginasPrueba de SensorPaul CoralAún no hay calificaciones
- La Iglesia Inicio Su Vida Con Los Testigos de Cristo - Primera ParteDocumento5 páginasLa Iglesia Inicio Su Vida Con Los Testigos de Cristo - Primera PartemenchyzAún no hay calificaciones
- Resumen Cuenta Visa Oct 2021Documento3 páginasResumen Cuenta Visa Oct 2021Pablo Mendez RavelliAún no hay calificaciones