También podría gustarte
- Pravana-FICHAS-T - CNICAS-2018.pdf Filename UTF-8''Pravana-FICHAS-TÉCNICAS-2018Documento26 páginasPravana-FICHAS-T - CNICAS-2018.pdf Filename UTF-8''Pravana-FICHAS-TÉCNICAS-2018Mario Alfonso Peña ArancibiaAún no hay calificaciones
- 6 Perspectivas Personales - Manual Del EstudianteDocumento50 páginas6 Perspectivas Personales - Manual Del EstudianteAngie InfanzonAún no hay calificaciones
- Simulacro-2-Parcial-2-Geometria Vectorial ItmDocumento2 páginasSimulacro-2-Parcial-2-Geometria Vectorial ItmJuan Pablo RebolledoAún no hay calificaciones
- Ventilador - Manual de Operacion y Mantenimiento ZITRONDocumento134 páginasVentilador - Manual de Operacion y Mantenimiento ZITRONAlbeiro Henao Gómez100% (1)
- Estadística 1 IE 124 Parcial 1 11 05 2021Documento18 páginasEstadística 1 IE 124 Parcial 1 11 05 2021Luis BernalAún no hay calificaciones
- Guia de Estudio de Psicologia de Las Diferencias IndividualesDocumento226 páginasGuia de Estudio de Psicologia de Las Diferencias IndividualesOscar Javier Gaitan Trujillo100% (3)
- Epílogo de La Estructura de Las Revoluciones Científicas - KuhnDocumento6 páginasEpílogo de La Estructura de Las Revoluciones Científicas - KuhnRuck CésarAún no hay calificaciones
- Muestreadores y Retenedores - Control Digital - Tarea OpcionalDocumento10 páginasMuestreadores y Retenedores - Control Digital - Tarea OpcionalBoris Benites CalenzaniAún no hay calificaciones
- Programa Sintetico Mecanica ClasicaDocumento2 páginasPrograma Sintetico Mecanica ClasicaLuis Barbaciega EnriqueAún no hay calificaciones
- OptimizacionDocumento22 páginasOptimizacionGenaro HernandezAún no hay calificaciones
- Practica 4Documento1 páginaPractica 4MAURICIO TORO VASCOAún no hay calificaciones
- UntitledDocumento49 páginasUntitledMAYCk ALEXANDER100% (1)
- Medición de Densidades y Aplicación de La Teoría de ErroresDocumento7 páginasMedición de Densidades y Aplicación de La Teoría de ErroresKristy HernandezAún no hay calificaciones
- Laboratorio FisicaDocumento9 páginasLaboratorio FisicaJd Barahona100% (1)
- Trabajo Final Quimica OrganicaDocumento9 páginasTrabajo Final Quimica OrganicaYeseniaAún no hay calificaciones
- Lab02-Regresion Lineal-AlfaroDocumento15 páginasLab02-Regresion Lineal-AlfaroDiego GilbertoAún no hay calificaciones
- PrimerParcialModelosSimulacion Alejandro Alcalá GranjaDocumento4 páginasPrimerParcialModelosSimulacion Alejandro Alcalá GranjaAlejandro Mario Alcala GranjaAún no hay calificaciones
- Movimiento de ProyectilesDocumento7 páginasMovimiento de ProyectilesDennis BenitezAún no hay calificaciones
- A Través de La GUERRADocumento17 páginasA Través de La GUERRAEdwin GilAún no hay calificaciones
- Taller 2Documento4 páginasTaller 2WilliamAún no hay calificaciones
- Capítulo 5-MatlabDocumento52 páginasCapítulo 5-MatlabMaría AngélicaAún no hay calificaciones
- Práctica 7. Estudio de TiemposDocumento15 páginasPráctica 7. Estudio de TiemposAMANDA VALERIA MIGOYA SUAREZAún no hay calificaciones
- EstadísticaDocumento13 páginasEstadísticaRogelio RosasAún no hay calificaciones
- LABORATORIODocumento4 páginasLABORATORIOJesus Armando PapamijaAún no hay calificaciones
- Ejercicios de PlaneaciónDocumento52 páginasEjercicios de PlaneaciónJUAN DAVID ALAVA RAMIREZAún no hay calificaciones
- Tallerevaluacion 2Documento1 páginaTallerevaluacion 2Neider AragonAún no hay calificaciones
- Pauta Certamen 1Documento5 páginasPauta Certamen 1Victor ValdebenitoAún no hay calificaciones
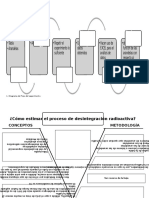
- V de Gowin - Desintegración RadioactivaDocumento3 páginasV de Gowin - Desintegración RadioactivaBrayanMatosAún no hay calificaciones
- Taller Movimiento Ondulatorio Fisica 2Documento17 páginasTaller Movimiento Ondulatorio Fisica 2Jesús Mamani TuyoAún no hay calificaciones
- Compilacion EjerciciosDocumento5 páginasCompilacion Ejerciciosalvaro alarcon100% (1)
- Fisica Basica IDocumento5 páginasFisica Basica IrobefiAún no hay calificaciones
- Informe 2 Lab Fis110-2Documento3 páginasInforme 2 Lab Fis110-2BastyReyesAún no hay calificaciones
- InformeDocumento5 páginasInformeSteel ArtAún no hay calificaciones
- Lab. de Fisica 1 LaboratorDocumento16 páginasLab. de Fisica 1 LaboratorJoselyn Katherinne Cusi ChaisaAún no hay calificaciones
- Laboratorio 1 CALV - 1Documento17 páginasLaboratorio 1 CALV - 1fabianprd9Aún no hay calificaciones
- Practica 1 Fisica QuiñonesDocumento7 páginasPractica 1 Fisica Quiñonesvictor emanuelAún no hay calificaciones
- Taller Ecuaciones Diferenciales - 2019 PDFDocumento6 páginasTaller Ecuaciones Diferenciales - 2019 PDFyair muñozAún no hay calificaciones
- Trabajo 10% - Ejercicios Solidos de Revolución y Secciones TransversalesDocumento2 páginasTrabajo 10% - Ejercicios Solidos de Revolución y Secciones TransversalesGABRIEL HERRERA LATORREAún no hay calificaciones
- Metodo RaveorDocumento14 páginasMetodo RaveorErik EscorciaAún no hay calificaciones
- Guia Ejercicios Quim224 2022 20 PartebDocumento69 páginasGuia Ejercicios Quim224 2022 20 Partebmatias bastiasAún no hay calificaciones
- Clase Taller 2 C IntegralDocumento19 páginasClase Taller 2 C IntegralSara Hoyos0% (1)
- Taller 1 S7Documento2 páginasTaller 1 S7San Maycol FielAún no hay calificaciones
- Ensayo Del El Tío Petros y La Conjetura de GoldbachDocumento14 páginasEnsayo Del El Tío Petros y La Conjetura de GoldbachChris Lpg ProañoAún no hay calificaciones
- Metodo RAVEOR Diseño de Un ServicioDocumento9 páginasMetodo RAVEOR Diseño de Un ServicioRobb L Montes RAún no hay calificaciones
- ColisionesDocumento7 páginasColisionesSharin Andrea Acevedo GómezAún no hay calificaciones
- Taller 3 DeterminantesDocumento4 páginasTaller 3 DeterminantesCristian VelandiaAún no hay calificaciones
- Tarea Derivación VectorialDocumento18 páginasTarea Derivación Vectorialcristiansaigua11Aún no hay calificaciones
- Termo 1Documento6 páginasTermo 1Fernanda EspinosaAún no hay calificaciones
- Primer Taller de EstadisticaDocumento1 páginaPrimer Taller de EstadisticaCatalina Buitrago0% (1)
- Lab I. Fisica MedicionesDocumento5 páginasLab I. Fisica MedicionesAlejandra GuerreroAún no hay calificaciones
- Taller Seleccion Sensor de Proximidad Sistemas MecatrónicosDocumento3 páginasTaller Seleccion Sensor de Proximidad Sistemas MecatrónicosRonnie GenezAún no hay calificaciones
- PenduloDocumento9 páginasPenduloEfrenAún no hay calificaciones
- Guia de Ejercicios Simulación-Temas 1-2Documento4 páginasGuia de Ejercicios Simulación-Temas 1-2Miguel A. CuicasAún no hay calificaciones
- P6 CondensadoresDocumento15 páginasP6 CondensadoresBrian Estacio100% (1)
- Entalpía de Fusión Del HieloDocumento5 páginasEntalpía de Fusión Del HieloPaula MaféAún no hay calificaciones
- Reporte de Práctica No. 2. Mechero de Bunsen - Lab. Quimica General I (LLENA)Documento2 páginasReporte de Práctica No. 2. Mechero de Bunsen - Lab. Quimica General I (LLENA)juanAún no hay calificaciones
- Taller Transistores 1Documento14 páginasTaller Transistores 1bastiAún no hay calificaciones
- Formulario+de+Calculo IDocumento2 páginasFormulario+de+Calculo IDaal GoanAún no hay calificaciones
- Fundamentos de Señales y Sistemas Capitulo 1Documento7 páginasFundamentos de Señales y Sistemas Capitulo 1Rogel AlfaroAún no hay calificaciones
- Actividad 3 ApaDocumento16 páginasActividad 3 ApaRenzoAún no hay calificaciones
- Act 3Documento13 páginasAct 3Gom CarletteAún no hay calificaciones
- Ejercicios Varios Calculo VectorialDocumento10 páginasEjercicios Varios Calculo VectorialMiguel Antonio Bula PicónAún no hay calificaciones
- Trabajo 3Documento15 páginasTrabajo 3Joinner AcostaAún no hay calificaciones
- G6 2 PDFDocumento12 páginasG6 2 PDFsaciAún no hay calificaciones
- 15 Minutos Dentro de Un Electron PDFDocumento3 páginas15 Minutos Dentro de Un Electron PDFYokedet ValdesAún no hay calificaciones
- Sistemas de Control 2 Labo1-4Documento7 páginasSistemas de Control 2 Labo1-4Iván Fernando Mayorga Hilario100% (2)
- Laboratorio-Sistemas Control Digital-3 PDFDocumento5 páginasLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio 3-Es711-Circuitos de Radiocomunicacion 07-11-2020 PDFDocumento1 páginaLaboratorio 3-Es711-Circuitos de Radiocomunicacion 07-11-2020 PDFBoris Benites CalenzaniAún no hay calificaciones
- Benites Calenzani - Practica - Circuitos de Radio PDFDocumento1 páginaBenites Calenzani - Practica - Circuitos de Radio PDFBoris Benites CalenzaniAún no hay calificaciones
- Practica Figueroa - Inchicaqui AlejandroDocumento1 páginaPractica Figueroa - Inchicaqui AlejandroBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio 1 - Sistema de Control Digital - 01Documento19 páginasLaboratorio 1 - Sistema de Control Digital - 01Boris Benites CalenzaniAún no hay calificaciones
- Laboratorio-Sistemas Control Digital-3 PDFDocumento5 páginasLaboratorio-Sistemas Control Digital-3 PDFBoris Benites CalenzaniAún no hay calificaciones
- Ejercicios para Resolver en LadderDocumento2 páginasEjercicios para Resolver en LadderBoris Benites Calenzani100% (1)
- Levitador Magnetico - Sistemas de Control LLDocumento9 páginasLevitador Magnetico - Sistemas de Control LLBoris Benites CalenzaniAún no hay calificaciones
- 25 Diap Guia para Ingresar Al PLC ZelioDocumento25 páginas25 Diap Guia para Ingresar Al PLC ZelioBoris Benites CalenzaniAún no hay calificaciones
- 23 Diap Programacion Ladder PLCDocumento24 páginas23 Diap Programacion Ladder PLCBoris Benites CalenzaniAún no hay calificaciones
- Monografia - Electronica de Potencia IiDocumento21 páginasMonografia - Electronica de Potencia IiBoris Benites CalenzaniAún no hay calificaciones
- Examen Final - Sistemas de Control IiDocumento10 páginasExamen Final - Sistemas de Control IiBoris Benites CalenzaniAún no hay calificaciones
- Tarea - Sistemas de Control IiDocumento21 páginasTarea - Sistemas de Control IiBoris Benites CalenzaniAún no hay calificaciones
- Laboratorio de Procesamiento Digital de SeñalesDocumento4 páginasLaboratorio de Procesamiento Digital de SeñalesBoris Benites CalenzaniAún no hay calificaciones
- Examen Parcial PDS 2020aDocumento2 páginasExamen Parcial PDS 2020aBoris Benites CalenzaniAún no hay calificaciones
- Los Psicólogos Escolares en Los Centros Educativos Contribuyen Con Estrategias Efectivas para Que Los Estudiantes Logren El Éxito AcadémicoDocumento6 páginasLos Psicólogos Escolares en Los Centros Educativos Contribuyen Con Estrategias Efectivas para Que Los Estudiantes Logren El Éxito AcadémicolnolascopozoAún no hay calificaciones
- 12 Formas de Amar A Su Hijo RebeldeDocumento3 páginas12 Formas de Amar A Su Hijo Rebeldeesteban-tolozaAún no hay calificaciones
- Proceso Estrategico II 1er EntreDocumento15 páginasProceso Estrategico II 1er EntreJose Abel Larrota CasallasAún no hay calificaciones
- Organización Del PresupuestoDocumento18 páginasOrganización Del PresupuestoAlizon LunaAún no hay calificaciones
- Vibraciones PDFDocumento26 páginasVibraciones PDFRichy Garcia100% (2)
- Actvidad 3 - Matriz EFE, EFI y MPCDocumento14 páginasActvidad 3 - Matriz EFE, EFI y MPCMauricio Herrera Sánchez50% (4)
- Informe ..Documento101 páginasInforme ..Nathaly E. Arrieta100% (1)
- Analisis de CovarianzaDocumento15 páginasAnalisis de CovarianzaRolando Villanueva100% (1)
- MAR, Lago, RiosDocumento1 páginaMAR, Lago, RiosArturo VargasAún no hay calificaciones
- Ger SegDocumento14 páginasGer SegBrandon Ñahuin CastroAún no hay calificaciones
- Universidad Nacional de Ingeniería-2Documento90 páginasUniversidad Nacional de Ingeniería-2Ana CardenasAún no hay calificaciones
- Totalizador 20 de Febrero 2014-UltimoDocumento1 páginaTotalizador 20 de Febrero 2014-UltimoMariela MaggioAún no hay calificaciones
- Folleto Lubricantes KIMIK 2.016Documento4 páginasFolleto Lubricantes KIMIK 2.016santiago gonzalezAún no hay calificaciones
- Las Teorías Sociológicas de Pierre Bourdieu y Norbert Elias - Los Conceptos de Campo Social y HabitusDocumento29 páginasLas Teorías Sociológicas de Pierre Bourdieu y Norbert Elias - Los Conceptos de Campo Social y HabitusLorena MesaAún no hay calificaciones
- Nos Preparamos para La Presentacion TeatralDocumento5 páginasNos Preparamos para La Presentacion TeatralMaritza Retamozo VeraAún no hay calificaciones
- Mapa Mental Elkin Fabian Duarte Cod. 80300392019Documento1 páginaMapa Mental Elkin Fabian Duarte Cod. 80300392019Laurita Artunduaga OtavoAún no hay calificaciones
- Colormix 2023 Terra Catalogo SWCA - CompressedDocumento24 páginasColormix 2023 Terra Catalogo SWCA - CompressedAndy RodriguezAún no hay calificaciones
- Informe de Cierre de Obra - Corp. TortolaniDocumento38 páginasInforme de Cierre de Obra - Corp. TortolaniJose Sernaque YoveraAún no hay calificaciones
- Jorge Luis Choque - JOINSDocumento4 páginasJorge Luis Choque - JOINSvelstard amvAún no hay calificaciones
- 05 BiogeografiaysuelosDocumento25 páginas05 BiogeografiaysuelosPablo RosarioAún no hay calificaciones
- Líderazgo TransformacionalDocumento6 páginasLíderazgo TransformacionalFredxVaidesIshlajAún no hay calificaciones
- Bosque de CachilDocumento8 páginasBosque de CachilSegundo QuintanaAún no hay calificaciones
- PoissonDocumento13 páginasPoissonEfra LarAún no hay calificaciones
- (TDS) High School DXD - Vol.06 PDFDocumento126 páginas(TDS) High School DXD - Vol.06 PDFArga ArgaAún no hay calificaciones
- Mapa Peligro Volcanico - FinalDocumento2 páginasMapa Peligro Volcanico - FinalMG Snchez RAún no hay calificaciones