También podría gustarte
- Manual Chrysler 200 Modelo 2015 PDFDocumento425 páginasManual Chrysler 200 Modelo 2015 PDFJulio Cesar Capra100% (1)
- Pumasunta Deber01Documento11 páginasPumasunta Deber01Gabriel PumasuntaAún no hay calificaciones
- Castro Alex - Deber N 1Documento10 páginasCastro Alex - Deber N 1Gabriel PumasuntaAún no hay calificaciones
- 4 Pumasunta Examenu1Documento3 páginas4 Pumasunta Examenu1Gabriel PumasuntaAún no hay calificaciones
- Intriago Richier Trabajo 01Documento13 páginasIntriago Richier Trabajo 01Gabriel PumasuntaAún no hay calificaciones
- La Naturaleza y Comportamiento de Los FluidosDocumento6 páginasLa Naturaleza y Comportamiento de Los FluidosGabriel PumasuntaAún no hay calificaciones
- 18 Prueba U2 PUMASUNTADocumento4 páginas18 Prueba U2 PUMASUNTAGabriel PumasuntaAún no hay calificaciones
- Ingeniería Del Mantenimiento: Categorías de Los Modos de FallaDocumento13 páginasIngeniería Del Mantenimiento: Categorías de Los Modos de FallaGabriel PumasuntaAún no hay calificaciones
- Informe Variador de FrecuenciaDocumento12 páginasInforme Variador de FrecuenciaGabriel PumasuntaAún no hay calificaciones
- PUMASUNTA CHICAIZA JUAN GABRIEL MollierDocumento5 páginasPUMASUNTA CHICAIZA JUAN GABRIEL MollierGabriel PumasuntaAún no hay calificaciones
- G2-Tarea4-Sistema EscapeDocumento10 páginasG2-Tarea4-Sistema EscapeGabriel PumasuntaAún no hay calificaciones
- Sistema RCM Modulo 1 de 4: Jorge MartinezDocumento21 páginasSistema RCM Modulo 1 de 4: Jorge MartinezGabriel PumasuntaAún no hay calificaciones
- PresasDocumento18 páginasPresasGabriel PumasuntaAún no hay calificaciones
- Evaluación Segundo ParcialDocumento6 páginasEvaluación Segundo ParcialGabriel PumasuntaAún no hay calificaciones
- Biela Manivela PDFDocumento8 páginasBiela Manivela PDFGabriel PumasuntaAún no hay calificaciones
- Caso N 1Documento1 páginaCaso N 1Gabriel PumasuntaAún no hay calificaciones
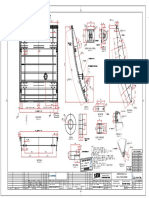
- Plano CompuertaDocumento1 páginaPlano CompuertacristianAún no hay calificaciones
- Catalogo Llantas 2024Documento29 páginasCatalogo Llantas 2024DIAZ DiazAún no hay calificaciones
- Motor CopesDocumento1 páginaMotor CopesEfrain JuarezAún no hay calificaciones
- Manual C-200-2008Documento42 páginasManual C-200-2008Lalo ChgAún no hay calificaciones
- Tablero de Problemas MatematicosDocumento4 páginasTablero de Problemas MatematicosAna ZamoraAún no hay calificaciones
- Carrera: Mecánico Automotriz Curso: AMOD-511 Mantenimiento Del Sistema Eléctrico Del VehículoDocumento4 páginasCarrera: Mecánico Automotriz Curso: AMOD-511 Mantenimiento Del Sistema Eléctrico Del VehículoEnrique MedranoAún no hay calificaciones
- Formato Inspección Programa Mecánico Herramienta EquiposDocumento5 páginasFormato Inspección Programa Mecánico Herramienta Equiposleidyyuliethjaramillo7Aún no hay calificaciones
- Irb Swivel Pin Bearings 2016Documento21 páginasIrb Swivel Pin Bearings 2016grupa2904Aún no hay calificaciones
- Ficha de Producto Envasadora Al Vacio Se 606ccDocumento2 páginasFicha de Producto Envasadora Al Vacio Se 606ccestuardo suarAún no hay calificaciones
- Automatización Del Sistema de Lavado On-Line para El Compresor Axial de La Turbina A GasDocumento98 páginasAutomatización Del Sistema de Lavado On-Line para El Compresor Axial de La Turbina A GasJose Bruno Adco0% (1)
- Alta TensionDocumento28 páginasAlta Tensioningrid peredaAún no hay calificaciones
- SORT 2017 Brochure ES WebDocumento16 páginasSORT 2017 Brochure ES WebAnon PAún no hay calificaciones
- Inscrito W0 LTG633225003987Documento1 páginaInscrito W0 LTG633225003987Qoxolatheluxe RIivaz de TumorroAún no hay calificaciones
- lmx02025 Flyer Serie TpiDocumento2 páginaslmx02025 Flyer Serie TpiJosé Gregorio González TorresAún no hay calificaciones
- Ficha Tecnica HRV 2022Documento3 páginasFicha Tecnica HRV 2022Luis MirandaAún no hay calificaciones
- Caso Practico TPDDocumento2 páginasCaso Practico TPDRody Elliot LeonAún no hay calificaciones
- 14-CHOFER OdiDocumento2 páginas14-CHOFER OdiRespetoPorTiMismoAún no hay calificaciones
- HSE-TF-F-67 Check List de StokaDocumento2 páginasHSE-TF-F-67 Check List de Stokareinaldo cruzAún no hay calificaciones
- Tanque Hidroneumático 100 LDocumento6 páginasTanque Hidroneumático 100 Lav xmAún no hay calificaciones
- Solicitud para Certificado de Título Garantizado: InstruccionesDocumento4 páginasSolicitud para Certificado de Título Garantizado: Instruccionesenoc quiñonesAún no hay calificaciones
- YuliDocumento7 páginasYuliHenry PastuñaAún no hay calificaciones
- Fo-Op-07 Hoja de Vida de VehiculosDocumento4 páginasFo-Op-07 Hoja de Vida de VehiculosHAún no hay calificaciones
- A51caf09fe4b9fdc Fhrcummins30 bj1045Documento2 páginasA51caf09fe4b9fdc Fhrcummins30 bj1045Andres GomezAún no hay calificaciones
- Examen de Retroexcavadora - StraconDocumento4 páginasExamen de Retroexcavadora - StraconhectorAún no hay calificaciones
- Caracteristicas Tecnicas de Planta de Fraccionamiento de GasDocumento4 páginasCaracteristicas Tecnicas de Planta de Fraccionamiento de GasISMAEL ROBERTO TICONA JAVIERAún no hay calificaciones
- Diferencial MecanicaDocumento7 páginasDiferencial MecanicaJeneth RosadoAún no hay calificaciones
- Tarea 5 Capitulo 6 ResnickDocumento2 páginasTarea 5 Capitulo 6 ResnickAlberto Arias BeltranAún no hay calificaciones
- LB ST Sss SLB 0009 Uso de CuñasDocumento6 páginasLB ST Sss SLB 0009 Uso de CuñasyurisAún no hay calificaciones
- Revisión Vehicular Antes de La Compra de Un VehículoDocumento4 páginasRevisión Vehicular Antes de La Compra de Un Vehículojeffer guarderasAún no hay calificaciones