También podría gustarte
- P-2783 Kola Real, Soplador 4hpDocumento2 páginasP-2783 Kola Real, Soplador 4hpWillyAún no hay calificaciones
- TC-2112 Buenaventura Tambo RDocumento2 páginasTC-2112 Buenaventura Tambo RWillyAún no hay calificaciones
- PDM Group 150717-1 Rev 0 - Tecnifajas - Servicio de Balanceo de Ventilador en AntaminaDocumento1 páginaPDM Group 150717-1 Rev 0 - Tecnifajas - Servicio de Balanceo de Ventilador en Antaminacesar abantoAún no hay calificaciones
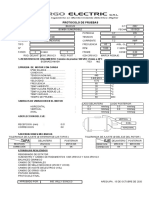
- Pruebas y Liberacion de Generador Electrico Taller Externo Sertesa (20-03 - 2014) PDFDocumento6 páginasPruebas y Liberacion de Generador Electrico Taller Externo Sertesa (20-03 - 2014) PDFVelasquez DavisAún no hay calificaciones
- ManualDocumento53 páginasManualvalentincondori100% (1)
- Manual de MantenimientoDocumento15 páginasManual de MantenimientoLeandro IvánAún no hay calificaciones
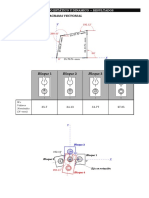
- Descomposición vectorial y balanceo de vibracionesDocumento17 páginasDescomposición vectorial y balanceo de vibracionesSergio MiguelAún no hay calificaciones
- Empresas de formación práctica en electrotecnia en ArequipaDocumento8 páginasEmpresas de formación práctica en electrotecnia en ArequipaChristhian Mauricio Hancco Quispe0% (1)
- Reporte de Gastos PDM - Servicio de Balanceo DinamicoDocumento2 páginasReporte de Gastos PDM - Servicio de Balanceo Dinamicocesar abantoAún no hay calificaciones
- Inventario Repuestos Honda PeruDocumento30 páginasInventario Repuestos Honda PeruJuan José Falcon Ponce0% (1)
- BalanceadoraDocumento28 páginasBalanceadoraPao JibaAún no hay calificaciones
- Silabo Anatomia I 2018-IDocumento22 páginasSilabo Anatomia I 2018-IVanessa AvilaAún no hay calificaciones
- Extrator de AireDocumento5 páginasExtrator de AireYenjis H. AimitumaAún no hay calificaciones
- Inf. 20210300167 Bomba Sandy Inox N 03 KolpaDocumento4 páginasInf. 20210300167 Bomba Sandy Inox N 03 KolpaJames Robladillo TiconaAún no hay calificaciones
- TC-1819 Alicorp MDocumento2 páginasTC-1819 Alicorp MWillyAún no hay calificaciones
- Informe Técnico J. Baldeon - Abb 110KWDocumento4 páginasInforme Técnico J. Baldeon - Abb 110KWfrankoAún no hay calificaciones
- Balanceo dinámico rotor turbina vaporDocumento2 páginasBalanceo dinámico rotor turbina vaporjairo enrique silva rAún no hay calificaciones
- 4°TAREA - Analisis VibracionalDocumento47 páginas4°TAREA - Analisis VibracionalomarAún no hay calificaciones
- Luis Saldarriaga 90GDocumento14 páginasLuis Saldarriaga 90GMarcelo Saldarriaga RiveraAún no hay calificaciones
- Alineaci N y Balanceo de M Quinas RotativasDocumento12 páginasAlineaci N y Balanceo de M Quinas Rotativasleobayona5Aún no hay calificaciones
- P-2220 Motor 15hp-MetsoDocumento2 páginasP-2220 Motor 15hp-MetsowillyAún no hay calificaciones
- Balanceo Estático y DinámicoDocumento8 páginasBalanceo Estático y DinámicoRodrigo VelásteguiAún no hay calificaciones
- Capacidad de CargaDocumento2 páginasCapacidad de Carganikita_tabaresAún no hay calificaciones
- Cotización SB000136 - Molino B PDFDocumento2 páginasCotización SB000136 - Molino B PDFjosechr6Aún no hay calificaciones
- Balanceo Dinámico Ventilador Transporte Molino 1Documento3 páginasBalanceo Dinámico Ventilador Transporte Molino 1victor perdomoAún no hay calificaciones
- FT Protectores Auditivos Tipo Tapon TPR Ep t06c CajaDocumento2 páginasFT Protectores Auditivos Tipo Tapon TPR Ep t06c CajaRAMIRO JUNIOR CHAUCA ALTAMIRANOAún no hay calificaciones
- Memoria Su - I.E. Señor de La MesiricordiaDocumento95 páginasMemoria Su - I.E. Señor de La MesiricordiaCarlos Humberto Sanchez PalominoAún no hay calificaciones
- Repuestos para motocicletas y scootersDocumento305 páginasRepuestos para motocicletas y scootersJorge GonzalesAún no hay calificaciones
- Chistes de DoctoresDocumento7 páginasChistes de DoctoresluihungsaAún no hay calificaciones
- Informe Tecnico TermografiaDocumento28 páginasInforme Tecnico TermografiaJosé AntonioAún no hay calificaciones
- Solupred-20211108-22 - Sensor Vibrometro Avanzado SKF Quickcollect - HaydukDocumento6 páginasSolupred-20211108-22 - Sensor Vibrometro Avanzado SKF Quickcollect - HaydukErnie Gomez ColquichaguaAún no hay calificaciones
- Catalogo PolipastosDocumento10 páginasCatalogo Polipastosjesocamx2057Aún no hay calificaciones
- Motores de Minera Catalina HuancaDocumento22 páginasMotores de Minera Catalina HuancaTheZniper100% (1)
- P-2189 Motorfreno 1.1kw-AlicorpDocumento2 páginasP-2189 Motorfreno 1.1kw-AlicorpWillyAún no hay calificaciones
- Balanceo Excitatriz Piloto U29Documento2 páginasBalanceo Excitatriz Piloto U29bernacasbasAún no hay calificaciones
- Analisis de Vibracion Grupo ElectrogenoDocumento9 páginasAnalisis de Vibracion Grupo ElectrogenogatoluisAún no hay calificaciones
- S35 014-024 Analisis Espectral Chumaceras (29.08.21)Documento6 páginasS35 014-024 Analisis Espectral Chumaceras (29.08.21)Daniel Alonso Luna MermaAún no hay calificaciones
- Ot 003 Motor 37 Kw-P17-La RinconadaDocumento6 páginasOt 003 Motor 37 Kw-P17-La RinconadaWilly100% (1)
- Análisis Vibracional Turbogenerador Siemens 35MWDocumento1 páginaAnálisis Vibracional Turbogenerador Siemens 35MWhomeroAún no hay calificaciones
- Lista Precios Industrial Legrand 2022Documento108 páginasLista Precios Industrial Legrand 2022Gustavo Jose Gonzalez ParodyAún no hay calificaciones
- Particulas y Liquidos PenetrantesDocumento9 páginasParticulas y Liquidos PenetrantesJose Manuel Carcamo SaezAún no hay calificaciones
- Informe Detallado de Termografia Planta Malabrigo Chi Op2021-1Documento19 páginasInforme Detallado de Termografia Planta Malabrigo Chi Op2021-1Ernie Gomez ColquichaguaAún no hay calificaciones
- Mot-A-B Protocolo Final Motores Dipper Trips 3HP DC General Electric (V&B Industrial Iqq)Documento5 páginasMot-A-B Protocolo Final Motores Dipper Trips 3HP DC General Electric (V&B Industrial Iqq)Mauricio Donoso100% (1)
- Plan de Accion Sim1Documento3 páginasPlan de Accion Sim1victorberrospiAún no hay calificaciones
- Manual de Instrucciones (1) BalanceadoraDocumento11 páginasManual de Instrucciones (1) BalanceadoraCamilo CardonaAún no hay calificaciones
- Informe de Almacén Octubre 2021Documento11 páginasInforme de Almacén Octubre 2021Ellen SmithAún no hay calificaciones
- Inventario Ventiladores FebreroDocumento6 páginasInventario Ventiladores FebreroALEX CAJAHUANCAAún no hay calificaciones
- Motores eléctricos 185kw evaluación reparaciónDocumento6 páginasMotores eléctricos 185kw evaluación reparaciónTheZniperAún no hay calificaciones
- Equipos BrocalDocumento16 páginasEquipos BrocalRodríguez EdwardAún no hay calificaciones
- Catalogo Junio 3.2 Aldrich - CompressedDocumento127 páginasCatalogo Junio 3.2 Aldrich - CompressedJorge GonzalesAún no hay calificaciones
- Ejercicio Catalogo SMC1Documento27 páginasEjercicio Catalogo SMC1Rodolfo Tapia RamirezAún no hay calificaciones
- Historial de Fallas Equipos Calera 2023 1.5.2023 CaleraDocumento654 páginasHistorial de Fallas Equipos Calera 2023 1.5.2023 Caleraluis gustavoAún no hay calificaciones
- Proforma 1265 Rebobinado de Motor Electrico de 550 KW y Balanceo Dinamico Ventilador y Rotor G-14102014Documento2 páginasProforma 1265 Rebobinado de Motor Electrico de 550 KW y Balanceo Dinamico Ventilador y Rotor G-14102014Electromecanica AcericoAún no hay calificaciones
- Central Hidroelectrica ChanchaylloDocumento16 páginasCentral Hidroelectrica Chanchayllojhoan moscosoAún no hay calificaciones
- Cálculo cadena transmisión aireDocumento7 páginasCálculo cadena transmisión aireNolberto Sánchez VillarrealAún no hay calificaciones
- P-2949 Yura - Motor 5.5 KWDocumento4 páginasP-2949 Yura - Motor 5.5 KWWillyAún no hay calificaciones
- T3 Ventilador IndustrialDocumento18 páginasT3 Ventilador IndustrialCarlosGálvezAún no hay calificaciones
- P-2867 Bomba 3.7kw BackusDocumento2 páginasP-2867 Bomba 3.7kw BackusWillyAún no hay calificaciones
- Formulario TSF IDocumento2 páginasFormulario TSF IDiego López PérezAún no hay calificaciones
- Solicitudes en estructuras: conceptos y diagramasDocumento8 páginasSolicitudes en estructuras: conceptos y diagramasdianaAún no hay calificaciones
- Ejercicio 3Documento2 páginasEjercicio 3James EchAún no hay calificaciones
- Certificado SeizC2i1aFpRVgnNSxZ LrabattaDocumento2 páginasCertificado SeizC2i1aFpRVgnNSxZ LrabattaJames EchAún no hay calificaciones
- Resultados Balanceo Estático y DinámicoDocumento3 páginasResultados Balanceo Estático y DinámicoJames EchAún no hay calificaciones
- Análisis cinemático de un mecanismo manivela-correderaDocumento6 páginasAnálisis cinemático de un mecanismo manivela-correderaJames EchAún no hay calificaciones
- PRACTICA No 8 SÍNTESIS DE GENERACIÓN DE MOVIMIENTODocumento6 páginasPRACTICA No 8 SÍNTESIS DE GENERACIÓN DE MOVIMIENTOJames EchAún no hay calificaciones
- Balanceo - TeoríaDocumento7 páginasBalanceo - TeoríaJames EchAún no hay calificaciones
- PRACTICA No 7 MOTOR MONOCILINDRICO - BALANCEO Y FUERZAS DE SACUDIMIENTODocumento8 páginasPRACTICA No 7 MOTOR MONOCILINDRICO - BALANCEO Y FUERZAS DE SACUDIMIENTOJames EchAún no hay calificaciones
- Aparato de Fuerza de CoriolisDocumento3 páginasAparato de Fuerza de CoriolisJames EchAún no hay calificaciones
- GUIA DE PRACTICA No 5 BALANCEO ESTÁTICO Y DINÁMICO EQUIPO NUEVODocumento8 páginasGUIA DE PRACTICA No 5 BALANCEO ESTÁTICO Y DINÁMICO EQUIPO NUEVOJames EchAún no hay calificaciones
- PRACTICA No 2 ARTAS SAM PDFDocumento12 páginasPRACTICA No 2 ARTAS SAM PDFJames EchAún no hay calificaciones
- Lab Mecanismos 1Documento7 páginasLab Mecanismos 1DavidAún no hay calificaciones
- Practica Caja de Cambios ManualDocumento5 páginasPractica Caja de Cambios ManualJames EchAún no hay calificaciones
- Estudio Cinemático Varias Configuraciones Mecanismo Cuatro BarrasDocumento8 páginasEstudio Cinemático Varias Configuraciones Mecanismo Cuatro BarrasJames EchAún no hay calificaciones
- TEORÍA DE MECANISMOS - Carátula y Paginas InicialesDocumento5 páginasTEORÍA DE MECANISMOS - Carátula y Paginas InicialesJames EchAún no hay calificaciones
- Introducción a los mecanismosDocumento12 páginasIntroducción a los mecanismosSteven PalaciosAún no hay calificaciones
- Caratula Capitulo 1Documento1 páginaCaratula Capitulo 1James EchAún no hay calificaciones
- 02 Nomenclatura Diseño Analítico de LevasDocumento3 páginas02 Nomenclatura Diseño Analítico de LevasJames EchAún no hay calificaciones
- Estudio Cinemático Mecanismo Manivela Corredera 15 - 04 - 2017Documento7 páginasEstudio Cinemático Mecanismo Manivela Corredera 15 - 04 - 2017James EchAún no hay calificaciones
- 03 Ecuaciones para El Diseño Analítico de Levas IIDocumento1 página03 Ecuaciones para El Diseño Analítico de Levas IIJames EchAún no hay calificaciones
- Diapositivas - Capitulo 3 Manivela-CorrederaDocumento3 páginasDiapositivas - Capitulo 3 Manivela-CorrederaCarlosAún no hay calificaciones
- ExamenDocumento1 páginaExamenRobin ChiluisaAún no hay calificaciones
- Síntesis Con Pivotes Fijos DadosDocumento2 páginasSíntesis Con Pivotes Fijos DadosJames EchAún no hay calificaciones
- Deber Síntesis de Mecanismos PDFDocumento2 páginasDeber Síntesis de Mecanismos PDFJames EchAún no hay calificaciones
- Ecuación de Freudenstein - EjemploDocumento1 páginaEcuación de Freudenstein - EjemploJames EchAún no hay calificaciones
- Deber Diseño de Levas PDFDocumento3 páginasDeber Diseño de Levas PDFJonathan NaranjoAún no hay calificaciones
- Introducción a los mecanismosDocumento12 páginasIntroducción a los mecanismosSteven PalaciosAún no hay calificaciones
- Ecuacion de Fredeunstein - DesarrolloDocumento4 páginasEcuacion de Fredeunstein - DesarrolloJames EchAún no hay calificaciones
- Diapositivas - Fuerzas Dinamicas 2 PDFDocumento1 páginaDiapositivas - Fuerzas Dinamicas 2 PDFJames EchAún no hay calificaciones
- Ficha de Producto ROOF TOPDocumento2 páginasFicha de Producto ROOF TOPDavid Daniel Ayala ChiriqueAún no hay calificaciones
- Memoria Reubicacion Cuchillas ADA Sector El BoroDocumento11 páginasMemoria Reubicacion Cuchillas ADA Sector El BoropvaldesvergarAún no hay calificaciones
- Tema 4. La Dilatación Del Tiempo y La Contraccion de La LongitudDocumento4 páginasTema 4. La Dilatación Del Tiempo y La Contraccion de La Longitudcarloslopez85Aún no hay calificaciones
- Seguridad instalaciones industriales propanoDocumento21 páginasSeguridad instalaciones industriales propanoJavier Lozano FontenlaAún no hay calificaciones
- Informe Lab EjemploDocumento3 páginasInforme Lab EjemploCristian ArancibiaAún no hay calificaciones
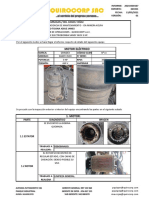
- Pr28996 CIA. MIN. ANTAMINA S.A. REPARACIÓN DE MOTOR DE 1500 HP - 2 Polos - Incluye Suministro de Chumaceras y Hausing (OT. 25713) .RGTDocumento5 páginasPr28996 CIA. MIN. ANTAMINA S.A. REPARACIÓN DE MOTOR DE 1500 HP - 2 Polos - Incluye Suministro de Chumaceras y Hausing (OT. 25713) .RGTproduccion AEIAún no hay calificaciones
- Autoevaluacion Nro 03 - Estadistica - JCS - 20Documento4 páginasAutoevaluacion Nro 03 - Estadistica - JCS - 20JHONAT GUILLERMO NUÑEZ VIVANCOAún no hay calificaciones
- CT 147 - SRP 2040-2050 - 09-2000 PDFDocumento7 páginasCT 147 - SRP 2040-2050 - 09-2000 PDFingenieria dieselAún no hay calificaciones
- Triptico Energía AeolicaDocumento2 páginasTriptico Energía AeolicaYetzabeth LandaetaAún no hay calificaciones
- Analisis Vibraciones Info1Documento12 páginasAnalisis Vibraciones Info1alineAún no hay calificaciones
- Introducción A La Estática - UCV 2022 IIDocumento28 páginasIntroducción A La Estática - UCV 2022 IISAMUEL EDUARDO MOGOLLON GIRONAún no hay calificaciones
- Colision ElasticaDocumento4 páginasColision ElasticaYiceth Carina Mosquera BonillaAún no hay calificaciones
- Cuaderno - de - Informes 2 Automatismo ElectricosDocumento13 páginasCuaderno - de - Informes 2 Automatismo ElectricosMichael Quispe eliasAún no hay calificaciones
- Semiconductores: Modelos, Propiedades y AplicacionesDocumento32 páginasSemiconductores: Modelos, Propiedades y AplicacionesSilvestreSilvaVásquezAún no hay calificaciones
- Cuadro SubestacionesDocumento1 páginaCuadro Subestacionesmadai trejo gomezAún no hay calificaciones
- Tabla de Colores EléctricosDocumento5 páginasTabla de Colores EléctricosTerpsicore EdgeAún no hay calificaciones
- Cueva Meza, Cristopher AlexanderDocumento48 páginasCueva Meza, Cristopher AlexanderGiancarlos Velarde NoaAún no hay calificaciones
- Hoja Instrucciones MTDDocumento10 páginasHoja Instrucciones MTDAINHOAAún no hay calificaciones
- Unidad Educativa Yasuní: SIERRA-AMAZONÍA2022-2023Documento16 páginasUnidad Educativa Yasuní: SIERRA-AMAZONÍA2022-2023Pëñâfîêľ FëřnânđôAún no hay calificaciones
- Semana 01 Sesión 01 Uc Sistemas de Potencia II 0Documento56 páginasSemana 01 Sesión 01 Uc Sistemas de Potencia II 0Walter Torres AvellanedaAún no hay calificaciones
- Purgar Circuito RefgDocumento4 páginasPurgar Circuito RefgFrancisco ArroyoAún no hay calificaciones
- Caída Inclinada - Tipo Saf 5Documento3 páginasCaída Inclinada - Tipo Saf 5Heber Barboza Fustamante100% (1)
- Mediciones y errores: análisis de datos experimentalesDocumento2 páginasMediciones y errores: análisis de datos experimentalesRamón Darío VilteAún no hay calificaciones
- Antología Física IIIDocumento53 páginasAntología Física IIIVictor H. Alcala90% (10)
- Fisica 5 AlexDocumento14 páginasFisica 5 AlexAlexander de la Serna GómezAún no hay calificaciones
- Biofisica UNLP Apo 1Documento13 páginasBiofisica UNLP Apo 1Mariano BaezAún no hay calificaciones
- Cuestionario de MotoresDocumento13 páginasCuestionario de MotoresBart Barto Impson50% (2)
- P7-Movimiento ParabólicoDocumento23 páginasP7-Movimiento Parabólicogustavo vegaAún no hay calificaciones
- Memoria Electrica David Masias 1 29Documento5 páginasMemoria Electrica David Masias 1 29victor almeronAún no hay calificaciones
- ADXL335, Forma de UsarloDocumento11 páginasADXL335, Forma de UsarloCésar Munayco100% (1)