También podría gustarte
- Aplicaciones de Las Ecuaciones DiferencialesDocumento40 páginasAplicaciones de Las Ecuaciones DiferencialesAMYNNXXXX82% (22)
- Ciencias Física 2 - Guía DidácticaDocumento200 páginasCiencias Física 2 - Guía DidácticaIvan Omar Moreno Mena75% (4)
- Ejercicios Tema 2Documento8 páginasEjercicios Tema 2Jose Manuel Castro VaqueroAún no hay calificaciones
- Informe de Control Automático Con PLCDocumento23 páginasInforme de Control Automático Con PLCMinerba ValiehereAún no hay calificaciones
- Trazado de Tubos, Perfiles y ChapasDocumento31 páginasTrazado de Tubos, Perfiles y Chapaseltimo1985100% (3)
- Sistemas de Automatizacion Basicos y VndosDocumento6 páginasSistemas de Automatizacion Basicos y VndosWill Barboza DurangoAún no hay calificaciones
- Sistemas de Control de Lazo CerradoDocumento5 páginasSistemas de Control de Lazo CerradonribonAún no hay calificaciones
- Fundamentos de Control ModernoDocumento11 páginasFundamentos de Control ModernoMarco Antonio CiauAún no hay calificaciones
- Control FuzzyDocumento6 páginasControl FuzzyIngrith BautistaAún no hay calificaciones
- Control AutomaticoDocumento13 páginasControl AutomaticoJadiel Isai100% (2)
- Introduccion Alos Sistemas de ControlDocumento6 páginasIntroduccion Alos Sistemas de ControlRamon PerezAún no hay calificaciones
- Actividad 2 Intro Leonard Lazo Abierto y CerradoDocumento5 páginasActividad 2 Intro Leonard Lazo Abierto y CerradoYAMILE CARDENASAún no hay calificaciones
- 1.1 Marco ConceptualDocumento10 páginas1.1 Marco ConceptualElian GaCuAún no hay calificaciones
- Informe 2 Grupo6 Capitulo1Documento11 páginasInforme 2 Grupo6 Capitulo1Edgar EnriquezAún no hay calificaciones
- Me 5 PDFDocumento31 páginasMe 5 PDFProyectos DecimatensionAún no hay calificaciones
- Estrategias de ControlDocumento25 páginasEstrategias de ControlEdwin Ancota AcoticonaAún no hay calificaciones
- Guía de Estudio N°2 Sistema de Control NOTA 7Documento14 páginasGuía de Estudio N°2 Sistema de Control NOTA 7Nicolas AhumadaAún no hay calificaciones
- Actividad 3 Sistemas AutomatizadosDocumento9 páginasActividad 3 Sistemas Automatizadosyeraldine.valdez228254Aún no hay calificaciones
- Practica 1Documento6 páginasPractica 1Angel HernándezAún no hay calificaciones
- Sistema Lazo Abierto y CerradoDocumento8 páginasSistema Lazo Abierto y CerradoIsma RománAún no hay calificaciones
- Espin Deber1Documento11 páginasEspin Deber1Jonathan Antonio Espín RosalesAún no hay calificaciones
- Cerrado Automatico de Una Cortina y Otros Dispositivos de CorrimientoDocumento9 páginasCerrado Automatico de Una Cortina y Otros Dispositivos de CorrimientoRuddy Calle AlconAún no hay calificaciones
- Tarea 2Documento7 páginasTarea 2Kateryne RochaAún no hay calificaciones
- Tarea 2Documento6 páginasTarea 2AlexVerdugoCabrera100% (1)
- AutomatismosDocumento7 páginasAutomatismosCarlos GonzalezAún no hay calificaciones
- INGENIERÍA MECATRÓNICA Ensayo ControlDocumento10 páginasINGENIERÍA MECATRÓNICA Ensayo ControlchekoronaldoAún no hay calificaciones
- Dinámica Aplicada y Teoría de Control-Tarea #2Documento10 páginasDinámica Aplicada y Teoría de Control-Tarea #2Juan HawkinsAún no hay calificaciones
- S1 IniaDocumento8 páginasS1 IniaKenia PáezAún no hay calificaciones
- TA1 NaulaDocumento5 páginasTA1 NaulaEDISON MANUEL NAULA MOROCHOAún no hay calificaciones
- 06 Quisbert AutomatizacionDocumento9 páginas06 Quisbert AutomatizacionPaul SaldiasAún no hay calificaciones
- Practica 1 de Control Automatico 1Documento10 páginasPractica 1 de Control Automatico 1carlosAún no hay calificaciones
- UNIDAD 1. Control ClasicoDocumento13 páginasUNIDAD 1. Control ClasicoJoaquin Celaya GarciaAún no hay calificaciones
- Introducción A Control de ProcesosDocumento6 páginasIntroducción A Control de ProcesosLUIS F. ZACATZONTEL GONZALEZAún no hay calificaciones
- 21507-14 TECNOLOGÍA de CONTROL - Introducción Al Modelado de Sistemas FísicosDocumento20 páginas21507-14 TECNOLOGÍA de CONTROL - Introducción Al Modelado de Sistemas FísicosPaola MasaAún no hay calificaciones
- Sistema Lazo Abierto y CerradoDocumento6 páginasSistema Lazo Abierto y Cerradoaide natalyAún no hay calificaciones
- Unidad III y IV Teoria y Asignacion (Autoguardado)Documento25 páginasUnidad III y IV Teoria y Asignacion (Autoguardado)kirito bassAún no hay calificaciones
- Resumen Sistemas de ControlDocumento7 páginasResumen Sistemas de ControlFranklin Morillo100% (3)
- 21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosDocumento15 páginas21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosTGAAún no hay calificaciones
- Ensayo Control 1Documento5 páginasEnsayo Control 1cheo90100% (1)
- Sistemas de Control IiDocumento2 páginasSistemas de Control IiComercializadora LiderAún no hay calificaciones
- Sistemas de Control IDocumento2 páginasSistemas de Control IComercializadora LiderAún no hay calificaciones
- Unidad 1. Conceptos Básicos de ControlDocumento7 páginasUnidad 1. Conceptos Básicos de ControlSaul Perez PerezAún no hay calificaciones
- Introduccion A Los Elementos de Control. Elementos Primarios. Ejemplos.Documento12 páginasIntroduccion A Los Elementos de Control. Elementos Primarios. Ejemplos.Maria Jose Viña CaraballoAún no hay calificaciones
- Guia1 Fundamentos de Control PDFDocumento9 páginasGuia1 Fundamentos de Control PDFEdwin J. OrtegaAún no hay calificaciones
- Control AnalogicoDocumento6 páginasControl Analogicofray1308Aún no hay calificaciones
- Mapa MentalDocumento5 páginasMapa MentalRuth ManriquezAún no hay calificaciones
- Practica 1 Hello World de LabviewDocumento7 páginasPractica 1 Hello World de LabviewJuan Pablo LavalleAún no hay calificaciones
- SISTEMAS ELECTRONICOS DE CONTROL TecnicaDocumento18 páginasSISTEMAS ELECTRONICOS DE CONTROL TecnicaAndres GonzalezAún no hay calificaciones
- Sistema de ControlDocumento16 páginasSistema de Controlluis romeroAún no hay calificaciones
- Concepto de Control en Lazo CerradoDocumento7 páginasConcepto de Control en Lazo CerradoJose Humberto RVAún no hay calificaciones
- 21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFDocumento15 páginas21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFFox NekAún no hay calificaciones
- Unidad 1 Control PDFDocumento8 páginasUnidad 1 Control PDFAdrian Yovanny Gomez DesiderioAún no hay calificaciones
- La Guía Manga de La ElectrónicaDocumento3 páginasLa Guía Manga de La ElectrónicachecoeleguaAún no hay calificaciones
- Unidad 1 Ingeneria ControlDocumento9 páginasUnidad 1 Ingeneria Controlhector quiroz garciaAún no hay calificaciones
- Sistemas de Control en Lazo Abierto y CerradoDocumento26 páginasSistemas de Control en Lazo Abierto y CerradoHomero Esquivel Cedillo100% (1)
- UC - PC - Unidad 1Documento5 páginasUC - PC - Unidad 1juan ruizAún no hay calificaciones
- Actividad 1 Control DigitalDocumento5 páginasActividad 1 Control DigitalCris TianAún no hay calificaciones
- Sistemas de Control - EnsayoDocumento12 páginasSistemas de Control - EnsayoJoan SmithAún no hay calificaciones
- Asignacion N2 Mendieta - PintoDocumento6 páginasAsignacion N2 Mendieta - PintoAxel MendietaAún no hay calificaciones
- Formato Consulta LazosDocumento4 páginasFormato Consulta LazosFred R V. ToapantaAún no hay calificaciones
- Unidad 1 Sistema de Contol Trabajo n1Documento10 páginasUnidad 1 Sistema de Contol Trabajo n1Maria Ivethe Acosta BeyAún no hay calificaciones
- Introducción A Los Sistemas de ControlDocumento24 páginasIntroducción A Los Sistemas de ControlJerri BetancourtAún no hay calificaciones
- Sistemas de ControlDocumento8 páginasSistemas de ControlErick Can PerezAún no hay calificaciones
- Material Formacion 4 PDFDocumento13 páginasMaterial Formacion 4 PDFjaiderAún no hay calificaciones
- Guia Aprendizaje3 PDFDocumento7 páginasGuia Aprendizaje3 PDFjaiderAún no hay calificaciones
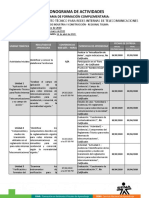
- Cronograma de Actividades: Programa de Formación ComplementariaDocumento2 páginasCronograma de Actividades: Programa de Formación ComplementariajaiderAún no hay calificaciones
- IE Evidencia Informe Desarrollar Las Rutinas de Control de Los Procesos de Automatizacion PDFDocumento3 páginasIE Evidencia Informe Desarrollar Las Rutinas de Control de Los Procesos de Automatizacion PDFjaiderAún no hay calificaciones
- Evidencia Estudio de Caso Seleccionar Acondicionamiento de Senal PDFDocumento2 páginasEvidencia Estudio de Caso Seleccionar Acondicionamiento de Senal PDFjaiderAún no hay calificaciones
- Evidencia Estudio de Caso Seleccionar Acondicionamiento de Senal PDFDocumento2 páginasEvidencia Estudio de Caso Seleccionar Acondicionamiento de Senal PDFjaiderAún no hay calificaciones
- Evidencia Informe Desarrollar Las Rutinas de Control de Los Procesos de Automatizacion PDFDocumento2 páginasEvidencia Informe Desarrollar Las Rutinas de Control de Los Procesos de Automatizacion PDFjaiderAún no hay calificaciones
- 2 Fuerza HidrostáticaDocumento12 páginas2 Fuerza HidrostáticaDaniel AlejandroAún no hay calificaciones
- Basicos Del Metabolismo Con Frank SuarezDocumento3 páginasBasicos Del Metabolismo Con Frank SuarezJuan Carlos Llanos Perea0% (1)
- Adjuntar Archivos en Correspondencia WordDocumento3 páginasAdjuntar Archivos en Correspondencia Wordlecue0% (1)
- Toma de TierraDocumento18 páginasToma de TierraJorge BravoAún no hay calificaciones
- Informe Sobre Capacitancia en Condensador de Placas Circulares y Paralelas IlianaDocumento4 páginasInforme Sobre Capacitancia en Condensador de Placas Circulares y Paralelas IlianaIliana Hostia GutierrezAún no hay calificaciones
- Programa-Estadística Fundamental 2016Documento2 páginasPrograma-Estadística Fundamental 2016Isabela PiedrasantaAún no hay calificaciones
- 2° Sesion 09 - 09 - 21Documento8 páginas2° Sesion 09 - 09 - 21Agapito Paredes ChavezAún no hay calificaciones
- Katalox Light Manual de OperacionDocumento8 páginasKatalox Light Manual de Operacionluis castellonAún no hay calificaciones
- Modelación de Los Montos Máximos de Siniestros en El SeguroDocumento108 páginasModelación de Los Montos Máximos de Siniestros en El SeguroGustavo MonjeAún no hay calificaciones
- Sitema de Ecuaciones LinealesDocumento9 páginasSitema de Ecuaciones LinealescatalinaAún no hay calificaciones
- 1) Experto en S.I.G 10.2-Mod I-Sesión 11-Establecer Simbología para Una Capa o Layer-1Documento12 páginas1) Experto en S.I.G 10.2-Mod I-Sesión 11-Establecer Simbología para Una Capa o Layer-1Catherin Chelsy Rivera IzquierdoAún no hay calificaciones
- U2 T5 DanielaMercadoDocumento4 páginasU2 T5 DanielaMercadoDaniela Gisel Mercado AparicioAún no hay calificaciones
- Elipse HiperbolaDocumento102 páginasElipse HiperbolaBruno Fabrizio Ortiz CondoriAún no hay calificaciones
- Ciclos Termodinamicos InvestigacionDocumento15 páginasCiclos Termodinamicos InvestigacionRodrigo Delgadillo ArceAún no hay calificaciones
- Examen de Proteinas y Enzimas 2021-IDocumento2 páginasExamen de Proteinas y Enzimas 2021-ICARLA ANDREA RIOS ENRIQUEZAún no hay calificaciones
- Curva de LissajousDocumento4 páginasCurva de LissajousAdrian MagañaAún no hay calificaciones
- Leccion 12 Metodos de Control de ArenaDocumento19 páginasLeccion 12 Metodos de Control de Arenapelusa60Aún no hay calificaciones
- Simpson 1Documento7 páginasSimpson 1Chris Glibert Hans Ttito ToribioAún no hay calificaciones
- Formas NormalesDocumento6 páginasFormas NormalesJulio Lopez-NunezAún no hay calificaciones
- Verano Integral ArimeticaDocumento21 páginasVerano Integral ArimeticaEliseo Tafur FustamanteAún no hay calificaciones
- Contenido Semana 7Documento16 páginasContenido Semana 7Gissel ContrerasAún no hay calificaciones
- 6 Impulso y Cantidad de Movimiento en Canales AbiertosDocumento30 páginas6 Impulso y Cantidad de Movimiento en Canales AbiertosJohana Maria Garcia DuarteAún no hay calificaciones
- L. T. F. Gamut - Introducción A La Lógica-EudebaDocumento20 páginasL. T. F. Gamut - Introducción A La Lógica-EudebaJorge Nicolás LuceroAún no hay calificaciones
- Guia Maap Bms-301 Cálculo IDocumento130 páginasGuia Maap Bms-301 Cálculo IJose Maria Arroyo OrtizAún no hay calificaciones
- Tasaciones Clase 2Documento28 páginasTasaciones Clase 2bassomarcela69Aún no hay calificaciones