También podría gustarte
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Tipos de Sistemas de ControlDocumento5 páginasTipos de Sistemas de ControlErick PonceAún no hay calificaciones
- Sistema de ControlDocumento7 páginasSistema de ControlMIREYA BUITRAGO MORAAún no hay calificaciones
- Los Sistemas de Control Son Agrupados en Tres Tipos BásicoDocumento2 páginasLos Sistemas de Control Son Agrupados en Tres Tipos Básicomúsica millerAún no hay calificaciones
- Tipos de Sistemas de ControlDocumento3 páginasTipos de Sistemas de ControlEdgar Wilfrido MenesesAún no hay calificaciones
- 4 Sistemas de ControlDocumento6 páginas4 Sistemas de ControlRAMOS PAREDES Jhanpier PedroAún no hay calificaciones
- Clasificación de Los Sistemas de Control Según Su ComportamientoDocumento10 páginasClasificación de Los Sistemas de Control Según Su Comportamientostand2270% (2)
- Sistema de ControlDocumento16 páginasSistema de Controlluis romeroAún no hay calificaciones
- Sistema de ControlDocumento12 páginasSistema de ControlalupolloAún no hay calificaciones
- Sistemas de Control Lazo Abierto y CerradoDocumento41 páginasSistemas de Control Lazo Abierto y CerradoRaul Diaz100% (1)
- Sistema de ControlDocumento14 páginasSistema de ControlEliana Rojas100% (1)
- Proceso de ControlDocumento17 páginasProceso de ControlRose Marie SuarezAún no hay calificaciones
- Lazo Abierto y CerradoDocumento18 páginasLazo Abierto y CerradoEleonel Cuenca GonzalezAún no hay calificaciones
- Introducción A Los Sistemas de ControlDocumento8 páginasIntroducción A Los Sistemas de ControlDaniela BlascoAún no hay calificaciones
- Sistema de ControlDocumento7 páginasSistema de ControlArturo Yanez S.G.Aún no hay calificaciones
- Control Clasico Unidad 1Documento32 páginasControl Clasico Unidad 1Jose Alberto Lozano EusebioAún no hay calificaciones
- Tarea 3 Sistema de ControlDocumento5 páginasTarea 3 Sistema de ControlGiancarlo VegaAún no hay calificaciones
- Antologia Control AnalogicoDocumento61 páginasAntologia Control AnalogicoJuan Lopez GarciaAún no hay calificaciones
- Tarea 2Documento7 páginasTarea 2Kateryne RochaAún no hay calificaciones
- Trabajo 1 SimulacionDocumento12 páginasTrabajo 1 SimulacionLuis GalindoAún no hay calificaciones
- Conseptos de ControlDocumento7 páginasConseptos de ControlEduardo uhAún no hay calificaciones
- Sistemas de ControlDocumento3 páginasSistemas de ControlCRISTIAN ANTONIO PEREZ ATENCIAAún no hay calificaciones
- Pruebas Eléctricas en TransformadoresDocumento13 páginasPruebas Eléctricas en TransformadoresRjose Bsanchez100% (2)
- Control MultivariableDocumento5 páginasControl MultivariableAlex Aguirre ParedesAún no hay calificaciones
- Modelación de SistemasDocumento6 páginasModelación de SistemasHugo FelixAún no hay calificaciones
- Tarea #1. Introducción A Los SistemasDocumento7 páginasTarea #1. Introducción A Los SistemasManuel Jacob Grijalva SanchezAún no hay calificaciones
- Ingeniería de Control ClasicoDocumento13 páginasIngeniería de Control ClasicoLu CisnerosAún no hay calificaciones
- Sistema de ControlDocumento6 páginasSistema de ControlEimer SalgueroAún no hay calificaciones
- 2.1 Modelacion Dinamica de SistemasDocumento24 páginas2.1 Modelacion Dinamica de SistemasCecilia Sanchez SanchezAún no hay calificaciones
- Sistemas de Control - EnsayoDocumento12 páginasSistemas de Control - EnsayoJoan SmithAún no hay calificaciones
- Teoria de Sistemas Sesion VDocumento27 páginasTeoria de Sistemas Sesion Vuso acaciasAún no hay calificaciones
- Sistemas de Control Lineales Vs No LinealesDocumento4 páginasSistemas de Control Lineales Vs No LinealesHenry Toro100% (3)
- Sistemas de Control Lineales Vs No Lineales PDFDocumento4 páginasSistemas de Control Lineales Vs No Lineales PDFluisAún no hay calificaciones
- Diapositivas Temas 19-24 JAGBDocumento16 páginasDiapositivas Temas 19-24 JAGBjoseantoniojagbAún no hay calificaciones
- Samuel Garcia Escobar - Modelacion Dinamica de SistemasDocumento30 páginasSamuel Garcia Escobar - Modelacion Dinamica de SistemasAnne AlcantaraAún no hay calificaciones
- Investigacion 1 GTRDocumento3 páginasInvestigacion 1 GTRTu abuelita feaAún no hay calificaciones
- La Guía Manga de La ElectrónicaDocumento3 páginasLa Guía Manga de La ElectrónicachecoeleguaAún no hay calificaciones
- Actividad 9 Sistemas de ControlDocumento9 páginasActividad 9 Sistemas de ControlJuan MartinezAún no hay calificaciones
- Tema 41 - Sistemas ReguladosDocumento15 páginasTema 41 - Sistemas ReguladosDavidMartinezAlloAún no hay calificaciones
- Guia1 Fundamentos de Control PDFDocumento9 páginasGuia1 Fundamentos de Control PDFEdwin J. OrtegaAún no hay calificaciones
- Fundamentos de Control ModernoDocumento11 páginasFundamentos de Control ModernoMarco Antonio CiauAún no hay calificaciones
- Actividad 9 Sistemas de Control JUAN PABLO MTZDocumento9 páginasActividad 9 Sistemas de Control JUAN PABLO MTZJuan MartinezAún no hay calificaciones
- Unidad III y IV Teoria y Asignacion (Autoguardado)Documento25 páginasUnidad III y IV Teoria y Asignacion (Autoguardado)kirito bassAún no hay calificaciones
- INGENIERÍA MECATRÓNICA Ensayo ControlDocumento10 páginasINGENIERÍA MECATRÓNICA Ensayo ControlchekoronaldoAún no hay calificaciones
- Aut y Control - Tema1Documento118 páginasAut y Control - Tema1Familia Lara GomezAún no hay calificaciones
- Control RetroalimentadoDocumento41 páginasControl RetroalimentadoJavier Chaiña0% (1)
- Control RetroalimentadoDocumento39 páginasControl RetroalimentadoJavier ChaiñaAún no hay calificaciones
- Conceptos Basicos de ControlDocumento3 páginasConceptos Basicos de Controlarmando teranAún no hay calificaciones
- Trabajo de Teoria de ControlDocumento71 páginasTrabajo de Teoria de ControlAlfredo GaytánAún no hay calificaciones
- Teoria de Control 1Documento9 páginasTeoria de Control 1jose poleoAún no hay calificaciones
- Actividad - Sistemas de Control - Araujo Galindo - WordDocumento18 páginasActividad - Sistemas de Control - Araujo Galindo - Wordhiram galindoAún no hay calificaciones
- Introducion Teoria de Control 01Documento36 páginasIntroducion Teoria de Control 01Huanca Mamani Yessica LauraAún no hay calificaciones
- Apuntes Control Continuo-1Documento376 páginasApuntes Control Continuo-1ArturoAún no hay calificaciones
- Introducción A Control de ProcesosDocumento6 páginasIntroducción A Control de ProcesosLUIS F. ZACATZONTEL GONZALEZAún no hay calificaciones
- Algebra de BloquesDocumento33 páginasAlgebra de BloquesAlexander Mendez100% (1)
- Terminología y Definiciones Básicas PDFDocumento4 páginasTerminología y Definiciones Básicas PDFYohelis ZapataAún no hay calificaciones
- U1 - Introduccion A Los Sistemas de Medida y RegulaciónDocumento11 páginasU1 - Introduccion A Los Sistemas de Medida y RegulaciónFernando De la FuenteAún no hay calificaciones
- Lazo Abierto Lazo CerradoDocumento23 páginasLazo Abierto Lazo CerradoCristhian Alcocer PolancoAún no hay calificaciones
- Tema 1 - Conceptos y DefinicionesDocumento25 páginasTema 1 - Conceptos y DefinicionesLourdes ChirúAún no hay calificaciones
- Sistemas de Control Automatico Benjamin KuoDocumento21 páginasSistemas de Control Automatico Benjamin Kuocalvin8999100% (2)
- FORMATO CA IE 01 20-1. 1ra EvaluaciónDocumento2 páginasFORMATO CA IE 01 20-1. 1ra EvaluaciónAslhy SavannahAún no hay calificaciones
- Actividad Sumativa 3 Proteccion 21Documento1 páginaActividad Sumativa 3 Proteccion 21Aslhy SavannahAún no hay calificaciones
- Carrero JoseDocumento110 páginasCarrero JoseAslhy SavannahAún no hay calificaciones
- +actividad Sumativa IIDocumento1 página+actividad Sumativa IIAslhy SavannahAún no hay calificaciones
- +actividad Formativa P DistanciaDocumento15 páginas+actividad Formativa P DistanciaWrayan CarvajalAún no hay calificaciones
- CA IE 02 20-1 2da EVALUACIONDocumento3 páginasCA IE 02 20-1 2da EVALUACIONAslhy SavannahAún no hay calificaciones
- Diseno Del Sistema PrimarioDocumento11 páginasDiseno Del Sistema PrimarioHernán Peña0% (2)
- NT4 Distribucion Parte IIDocumento66 páginasNT4 Distribucion Parte IIAslhy SavannahAún no hay calificaciones
- Especificaciones Actividad Sumativa Relativa Al "Diseño de Circuitos de Distribución".Documento3 páginasEspecificaciones Actividad Sumativa Relativa Al "Diseño de Circuitos de Distribución".Aslhy SavannahAún no hay calificaciones
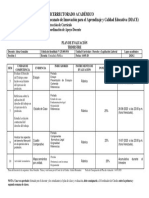
- Plan - Evaluacion - (Trimestre) Legislacion Laboral 2020Documento1 páginaPlan - Evaluacion - (Trimestre) Legislacion Laboral 2020Aslhy SavannahAún no hay calificaciones
- Uba # 1 Laboratorio de ControlDocumento6 páginasUba # 1 Laboratorio de ControlAslhy SavannahAún no hay calificaciones
- Evaluacion 3Documento1 páginaEvaluacion 3Aslhy SavannahAún no hay calificaciones
- Especificaciones Actividad Sumativa Relativa Al "Diseño de Circuitos de Distribución".Documento3 páginasEspecificaciones Actividad Sumativa Relativa Al "Diseño de Circuitos de Distribución".Aslhy SavannahAún no hay calificaciones
- Eval2 PotenciaDocumento1 páginaEval2 PotenciaAslhy SavannahAún no hay calificaciones
- Laboratorio II de MaquinasDocumento37 páginasLaboratorio II de MaquinasWefer AbadAún no hay calificaciones
- Evaluación 1 Servicio ComunitarioDocumento2 páginasEvaluación 1 Servicio ComunitarioAslhy SavannahAún no hay calificaciones
- Especificaciones Del Proyecto de Sistemas Industriales.Documento1 páginaEspecificaciones Del Proyecto de Sistemas Industriales.Aslhy SavannahAún no hay calificaciones
- Normas APA PDFDocumento26 páginasNormas APA PDFross_medAún no hay calificaciones
- Informe Escrito - Monografía LT Actividad Evaluativa 1 2019-3Documento1 páginaInforme Escrito - Monografía LT Actividad Evaluativa 1 2019-3Aslhy SavannahAún no hay calificaciones
- TRABAJO PRESENCIAL LAB CONTROL # 1 (Feb 20)Documento4 páginasTRABAJO PRESENCIAL LAB CONTROL # 1 (Feb 20)Aslhy SavannahAún no hay calificaciones
- Manual para La Elaboracion Presentacion y Evaluacion Del TG y TD UBA PDFDocumento133 páginasManual para La Elaboracion Presentacion y Evaluacion Del TG y TD UBA PDFMarielbis Dv NarvaezAún no hay calificaciones
- Control 2 4Documento14 páginasControl 2 4Aslhy SavannahAún no hay calificaciones
- Evaluacion 4Documento1 páginaEvaluacion 4Aslhy SavannahAún no hay calificaciones
- EjerciciosDocumento49 páginasEjerciciosAlejandro LópezAún no hay calificaciones
- Transform AdoresDocumento9 páginasTransform AdoresAslhy SavannahAún no hay calificaciones
- Glosario FEDocumento8 páginasGlosario FEAslhy SavannahAún no hay calificaciones
- Instrcciones Transferencia Al ExteriorDocumento1 páginaInstrcciones Transferencia Al ExteriorOri Duarte CAún no hay calificaciones
- RecuperacionDocumento3 páginasRecuperacionjohan sebastian romero castaño50% (2)
- Semana 15 Razones Trigonometricas - Reduccion Al Primer CuadranteDocumento2 páginasSemana 15 Razones Trigonometricas - Reduccion Al Primer CuadranteMiguel MezarinoAún no hay calificaciones
- Aliniamiento y BalanceoDocumento220 páginasAliniamiento y BalanceoWilmer Vargas100% (2)
- C10.1 Nomenclatura de Compuestos Químicos Inorgánicos IIIDocumento20 páginasC10.1 Nomenclatura de Compuestos Químicos Inorgánicos IIIGerald GahonaAún no hay calificaciones
- Cinemática ExplicadaDocumento23 páginasCinemática ExplicadaMariela Soto DiazAún no hay calificaciones
- Problema Resuelto T-3 Problemario BaranDocumento5 páginasProblema Resuelto T-3 Problemario BaranGlenda Ureña de ChavezAún no hay calificaciones
- Ciencias Exactas PDFDocumento3 páginasCiencias Exactas PDFMarisol RoseteAún no hay calificaciones
- Ejercicio de TCDocumento7 páginasEjercicio de TCSOREN RODRIGO TERZI ARRATIAAún no hay calificaciones
- Eglo Mexico Catalogo 2018 2019Documento173 páginasEglo Mexico Catalogo 2018 2019Kevin gomezAún no hay calificaciones
- Guia de Fisica Grado Noveno Tercer PeriodoDocumento2 páginasGuia de Fisica Grado Noveno Tercer PeriodoMONICA MARIA RIVERA LOPEZAún no hay calificaciones
- Química InorgánicaDocumento8 páginasQuímica InorgánicaMaxRipperAún no hay calificaciones
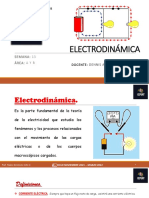
- ElectrodinámicaDocumento21 páginasElectrodinámicajocineyAún no hay calificaciones
- Universidad Ucad: Materiales OdontologicosDocumento12 páginasUniversidad Ucad: Materiales OdontologicosSary MTAún no hay calificaciones
- 3 Informe Montaje Circuito ElectricoDocumento14 páginas3 Informe Montaje Circuito ElectricoAlex CorreaAún no hay calificaciones
- Proyecto FaradayDocumento9 páginasProyecto FaradayStefan Giannini Brocca YatacoAún no hay calificaciones
- Consumo de Combustible Es Excesivo 3516 CatDocumento3 páginasConsumo de Combustible Es Excesivo 3516 CatfelixAún no hay calificaciones
- Clase 02 - Cartaboneo de Pasos, AlineamientosDocumento26 páginasClase 02 - Cartaboneo de Pasos, AlineamientosYherson Arnol Perez SalazarAún no hay calificaciones
- Analisis Numerico y Experimental de La Capacidad de Carga Al Arrancamiento de Anclas PlacasDocumento6 páginasAnalisis Numerico y Experimental de La Capacidad de Carga Al Arrancamiento de Anclas PlacasEdgar TeranAún no hay calificaciones
- CuestionarioDocumento3 páginasCuestionarioPablo FloresAún no hay calificaciones
- FISICA II Practica 2Documento6 páginasFISICA II Practica 2Erick D. BorqueAún no hay calificaciones
- Photoelectric Sensors XU - XUDA2PSMM8Documento3 páginasPhotoelectric Sensors XU - XUDA2PSMM8Erik Morales GarciaAún no hay calificaciones
- Central Termica VentanillaDocumento14 páginasCentral Termica VentanillaRonald Ratz Retamozo GamarraAún no hay calificaciones
- Ii - Examen Cear I 2024 VacaDocumento2 páginasIi - Examen Cear I 2024 VacaJULCA SILVA JOSE CARLOSAún no hay calificaciones
- La Electrocirugía Es La Aplicación de Electricidad Por Medio de Radiofrecuencia Sobre Un Tejido para Obtener Un Efecto Clínico DeseadoDocumento4 páginasLa Electrocirugía Es La Aplicación de Electricidad Por Medio de Radiofrecuencia Sobre Un Tejido para Obtener Un Efecto Clínico Deseadoyuribon1986Aún no hay calificaciones
- Tarifas de Conexion Energia 2022Documento45 páginasTarifas de Conexion Energia 2022Enmanuel Cuero MinaAún no hay calificaciones
- Radiografia Industrial Nivel 2Documento173 páginasRadiografia Industrial Nivel 2qw wqAún no hay calificaciones
- 06 Balance Energetico Planetario RadiacionDocumento40 páginas06 Balance Energetico Planetario RadiacionTheJoSPaDAún no hay calificaciones
- Diagrama de Conexión Del Circuito RLCDocumento6 páginasDiagrama de Conexión Del Circuito RLCmariconsuelo rosa melanoAún no hay calificaciones
- Fibra Optica Monomodo. G652D: NormasDocumento2 páginasFibra Optica Monomodo. G652D: NormasDanielito BscAún no hay calificaciones