También podría gustarte
- Componentes de Un Teléfono CelularDocumento1 páginaComponentes de Un Teléfono CelularBrit LazcanoAún no hay calificaciones
- Apreciación CinematográficaDocumento4 páginasApreciación CinematográficaAndrew DávilaAún no hay calificaciones
- Construccion de Sonotrodos PDFDocumento57 páginasConstruccion de Sonotrodos PDFandres felipe acevedo pulidoAún no hay calificaciones
- Resumen de Historia de La RobóticaDocumento11 páginasResumen de Historia de La RobóticaAprezaaBauerAún no hay calificaciones
- Engranaje Reductor PDFDocumento4 páginasEngranaje Reductor PDFJESUS QUINTERO GUIZAAún no hay calificaciones
- Diseño de Una Maquina VendingDocumento181 páginasDiseño de Una Maquina VendingJOSÉ ALEJANDRO CASTAÑEDA SURCOAún no hay calificaciones
- Impresión 3D: instrucciones paso a paso: La guía práctica para principiantes y usuarios!De EverandImpresión 3D: instrucciones paso a paso: La guía práctica para principiantes y usuarios!Aún no hay calificaciones
- Aprender Impresión 3D para makers con 100 ejercicios prácticosDe EverandAprender Impresión 3D para makers con 100 ejercicios prácticosAún no hay calificaciones
- Ensayo Sobre La Etica y Las Redes SocialesDocumento2 páginasEnsayo Sobre La Etica y Las Redes SocialesJane GrayAún no hay calificaciones
- Manual DBT 1Documento53 páginasManual DBT 1Miriam Cristaldo de HerreraAún no hay calificaciones
- Prototipado Rápido - Impresión 3DDocumento18 páginasPrototipado Rápido - Impresión 3DAe FugamAún no hay calificaciones
- Informe Filtro ArduinoDocumento3 páginasInforme Filtro ArduinoAndres ValdiviesoAún no hay calificaciones
- Guia Impresión 3DDocumento56 páginasGuia Impresión 3D_guybrush_Aún no hay calificaciones
- Descripcion Ironman 2Documento3 páginasDescripcion Ironman 2Daniel Caicedo BaronaAún no hay calificaciones
- Impresión 3DDocumento6 páginasImpresión 3DalexmorlaAún no hay calificaciones
- Funcionamiento de Una Impresora 3DDocumento20 páginasFuncionamiento de Una Impresora 3Djose ulloaAún no hay calificaciones
- CNC LaserDocumento40 páginasCNC LaserNando Martinez SandovalAún no hay calificaciones
- Documen - Tips Manual de Practicas Con Arduino r3 Christian RomoDocumento87 páginasDocumen - Tips Manual de Practicas Con Arduino r3 Christian Romoyo mismoAún no hay calificaciones
- InformeDiseñoE IOT-BlynkDocumento13 páginasInformeDiseñoE IOT-BlynkAlexander ValenciaAún no hay calificaciones
- Como Hacer Dinero Con La Impresion 3D: La Nueva Revolucion Digital: COMPUTADORES/ Teoría de Máquinas/ImpresorasDe EverandComo Hacer Dinero Con La Impresion 3D: La Nueva Revolucion Digital: COMPUTADORES/ Teoría de Máquinas/ImpresorasCalificación: 4 de 5 estrellas4/5 (4)
- Tesis Prototipo de Robot Móvil TeleoperadoDocumento107 páginasTesis Prototipo de Robot Móvil TeleoperadoGerson DepablosAún no hay calificaciones
- Control PID de Velocidad de Un Motor DC Manejado Comandado Mediante JoystickDocumento7 páginasControl PID de Velocidad de Un Motor DC Manejado Comandado Mediante JoystickWilliam SánchezAún no hay calificaciones
- Manual ESP8266Documento14 páginasManual ESP8266daniel muñoz100% (1)
- Robot Peleador SumoDocumento4 páginasRobot Peleador Sumobeast_electronic100% (1)
- Análisis y Diseño de Interfaces Centrado en La UX PDFDocumento9 páginasAnálisis y Diseño de Interfaces Centrado en La UX PDFedwinsmithbAún no hay calificaciones
- Desarrollo de Un Prototipo de Brazo Robótico - Daniel Osorio C - VersiónFinal - PG PDFDocumento86 páginasDesarrollo de Un Prototipo de Brazo Robótico - Daniel Osorio C - VersiónFinal - PG PDFDANIEL OSORIO CARDENASAún no hay calificaciones
- Inteligencia ArtificialDocumento3 páginasInteligencia ArtificialInteligencia ArtificialAún no hay calificaciones
- Ficha Tecnica LaserDocumento2 páginasFicha Tecnica Laseryoel gabriel quispeAún no hay calificaciones
- INTV 110 Instr PDFDocumento2 páginasINTV 110 Instr PDFAndres Zuno100% (1)
- Las Redes Neuronales en El Tratamiento de La Informacion FinancieraDocumento21 páginasLas Redes Neuronales en El Tratamiento de La Informacion FinancieraAdolfo VelasquezAún no hay calificaciones
- Reactor Arc DIY v1.0 (Electrónica)Documento10 páginasReactor Arc DIY v1.0 (Electrónica)Esequiel MontiveroAún no hay calificaciones
- Guia Definitiva de Filamientos Impresoras 3DDocumento6 páginasGuia Definitiva de Filamientos Impresoras 3DNatxo VaronaAún no hay calificaciones
- Mini Router CNCDocumento50 páginasMini Router CNCMiguel LaraAún no hay calificaciones
- CNCDocumento7 páginasCNCJose Margil Morales LinceAún no hay calificaciones
- Control de Velocidad Tipo PID para Un Motor DCDocumento5 páginasControl de Velocidad Tipo PID para Un Motor DCWilbert Ferro QuispeAún no hay calificaciones
- Taller PLCDocumento7 páginasTaller PLCJonathan MartinezAún no hay calificaciones
- Proyecto AutomatizacionDocumento66 páginasProyecto AutomatizacioncemhaxAún no hay calificaciones
- Ensayo: La Impresión 3D en ArquitecturaDocumento4 páginasEnsayo: La Impresión 3D en ArquitecturaJhossafat GalánAún no hay calificaciones
- Diseño y Construcción de Una Máquina CNC Que Realiza El Ruteo de Pistas y ElDocumento32 páginasDiseño y Construcción de Una Máquina CNC Que Realiza El Ruteo de Pistas y ElDanny Fernando100% (2)
- Fabricación AditivaDocumento6 páginasFabricación AditivaDavid Valle100% (1)
- Detector 5193sdDocumento3 páginasDetector 5193sdRonald GarciaAún no hay calificaciones
- Modelado 3D ScanerDocumento15 páginasModelado 3D ScanerAlex Moreano AAún no hay calificaciones
- Laborda - Desarrollo de Un Nodo Inalámbrico de Bajo Consumo Basado en Técnicas de Iot para Monito...Documento229 páginasLaborda - Desarrollo de Un Nodo Inalámbrico de Bajo Consumo Basado en Técnicas de Iot para Monito...Cristhian FradeAún no hay calificaciones
- Aplicaciones de La Iot IndustrialDocumento6 páginasAplicaciones de La Iot IndustrialGovanna LunaAún no hay calificaciones
- Kit DomoticaDocumento21 páginasKit DomoticaBanBán GarciaAún no hay calificaciones
- Impresión 3DDocumento13 páginasImpresión 3DDiego Santiago Herrera VázquezAún no hay calificaciones
- Fabricacion AditivaDocumento6 páginasFabricacion Aditivaterran313100% (1)
- Desarrollos Actuales Inteligencia ArtificialDocumento13 páginasDesarrollos Actuales Inteligencia ArtificialUriel Guerra0% (1)
- Cuaderno de CargaDocumento28 páginasCuaderno de CargaJorge Santiago MontielAún no hay calificaciones
- Tesis Ingenieria InversaDocumento132 páginasTesis Ingenieria InversaCarlos Rafael Lizarraga ArreolaAún no hay calificaciones
- Tesis CNCDocumento159 páginasTesis CNCManuel GarciaAún no hay calificaciones
- Impresion 3DDocumento17 páginasImpresion 3DCaterine Padilla Barrios100% (3)
- CAD/CAMDocumento19 páginasCAD/CAMJessAún no hay calificaciones
- COMPUTACIÓNDocumento21 páginasCOMPUTACIÓNJane Reyes Hernández100% (1)
- Ups KT00876Documento204 páginasUps KT00876wilsonsulcaAún no hay calificaciones
- Exocorteza: El sistema de procesamiento de información externa de la cibernética del siglo XXI que aumenta los procesos cognitivos del cerebroDe EverandExocorteza: El sistema de procesamiento de información externa de la cibernética del siglo XXI que aumenta los procesos cognitivos del cerebroAún no hay calificaciones
- Satélite Atmosférico: El dron con energía solar para proporcionar acceso a Internet a áreas remotasDe EverandSatélite Atmosférico: El dron con energía solar para proporcionar acceso a Internet a áreas remotasAún no hay calificaciones
- EL MUNDO FUTURO AÑOS POR DELANTE DE NOSOTROS: EL MUNDO FUTURO AÑOS POR DELANTE DE NOSOTROSDe EverandEL MUNDO FUTURO AÑOS POR DELANTE DE NOSOTROS: EL MUNDO FUTURO AÑOS POR DELANTE DE NOSOTROSAún no hay calificaciones
- Exoesqueleto Motorizado: El chaleco antibalas de "Iron Man" que muchos de nosotros pronto usaremosDe EverandExoesqueleto Motorizado: El chaleco antibalas de "Iron Man" que muchos de nosotros pronto usaremosAún no hay calificaciones
- 4 - Entrevista A La Familia Saanee - Ugel LambayequeDocumento4 páginas4 - Entrevista A La Familia Saanee - Ugel LambayequeMelissaAún no hay calificaciones
- CAPITULO 1 Determinacion de Demandas MaximasDocumento12 páginasCAPITULO 1 Determinacion de Demandas MaximasLizet TercerosAún no hay calificaciones
- Seguridad en Redes Ad-HocDocumento7 páginasSeguridad en Redes Ad-HocJonathan LunaAún no hay calificaciones
- Cédulas Sumarias o de ResumenDocumento3 páginasCédulas Sumarias o de ResumenFanni Dominguez Uc83% (6)
- Redaccion de Parrafos BrevesDocumento9 páginasRedaccion de Parrafos BrevesAlirio Henriquez AlvarengaAún no hay calificaciones
- Presentacion Modelo de Alistamiento y AuditoriaDocumento18 páginasPresentacion Modelo de Alistamiento y AuditoriaDaniel FierroAún no hay calificaciones
- Integraciòn Escolar: Integración Es Un Proceso Que Pretende Unificar La EducaciónDocumento2 páginasIntegraciòn Escolar: Integración Es Un Proceso Que Pretende Unificar La EducaciónCeleste DominguezAún no hay calificaciones
- Stanley MorisonDocumento3 páginasStanley Morisonbelen_lozano_guerraAún no hay calificaciones
- 13-01 Peces - Nutricion de PreInicio e InicioDocumento4 páginas13-01 Peces - Nutricion de PreInicio e InicioLorena Soledad Suxe VillalobosAún no hay calificaciones
- Unidad 4 Punto 4.2Documento8 páginasUnidad 4 Punto 4.2Dafne GarciaAún no hay calificaciones
- Portamiento HumanoDocumento16 páginasPortamiento HumanodanielAún no hay calificaciones
- Examen Parcial CONCRETODocumento25 páginasExamen Parcial CONCRETOVladimirIvanZavalaRiverosAún no hay calificaciones
- Agroecología y Sistemas Alimentarios SustentablesDocumento28 páginasAgroecología y Sistemas Alimentarios SustentablesCamilo ErnestoAún no hay calificaciones
- Contenido SueloDocumento129 páginasContenido SueloYamil CastilloAún no hay calificaciones
- Problemas de Modelación - EnunciadoDocumento30 páginasProblemas de Modelación - EnunciadoJoel GutiérrezAún no hay calificaciones
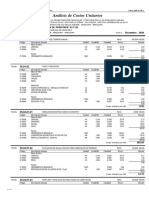
- Analisis de Costos Unitarios AMPLIACION DE PONTÓN #01 Y 02Documento10 páginasAnalisis de Costos Unitarios AMPLIACION DE PONTÓN #01 Y 02Edison PachecoAún no hay calificaciones
- Unidad 1 - Fase 1-Teorias Del Desarrollo-Grupo-21Documento7 páginasUnidad 1 - Fase 1-Teorias Del Desarrollo-Grupo-21Jessi mondragon0% (1)
- La Administración de Los Riesgos de Proyectos TecnológicosDocumento22 páginasLa Administración de Los Riesgos de Proyectos Tecnológicosjordan_ventura_2Aún no hay calificaciones
- Marino Posadas. Programación Segura Con .Net Framework (Ejemplo)Documento22 páginasMarino Posadas. Programación Segura Con .Net Framework (Ejemplo)sferhAún no hay calificaciones
- Cuadro Sinóptico - Abascal - CisnerosDocumento3 páginasCuadro Sinóptico - Abascal - CisnerosValeria AbascalAún no hay calificaciones
- Estrategias de LocalizaciónDocumento4 páginasEstrategias de LocalizaciónJosRuiz22100% (1)
- Evaluación InicialDocumento29 páginasEvaluación Inicialeliecer100% (1)
- SESION 01 Carpeta - Reglamento PPPDocumento10 páginasSESION 01 Carpeta - Reglamento PPPLISETH MEDALY CHIRINOS VASQUEZAún no hay calificaciones
- Examen de TelecomunicacionesDocumento7 páginasExamen de TelecomunicacionesDiana estefany MercedesAún no hay calificaciones
- Ejercicio 5Documento18 páginasEjercicio 5Diego RiveraAún no hay calificaciones
- 3 Matematicas 6.Documento5 páginas3 Matematicas 6.Jorge Anthony Yanayaco Quispe100% (1)
- Ensayo de Sismologia - Anibal Rodriguez PDFDocumento85 páginasEnsayo de Sismologia - Anibal Rodriguez PDFRebelde Chamo100% (1)