También podría gustarte
- PUENTESDocumento12 páginasPUENTESwillan castrejon teran100% (1)
- Propiedades elementales suelos ejerciciosDocumento64 páginasPropiedades elementales suelos ejerciciosyensi batistaAún no hay calificaciones
- Doble IntegraciónDocumento44 páginasDoble IntegraciónManuel Santisteban Tuñoque0% (1)
- Pc5-Sistema de Clasificación Sucs y AashtoDocumento24 páginasPc5-Sistema de Clasificación Sucs y AashtoPaola Ramos ChavezAún no hay calificaciones
- Trabajo de Investigación FormativaDocumento10 páginasTrabajo de Investigación FormativaEfr RjsAún no hay calificaciones
- Patologías Del ConcretoDocumento47 páginasPatologías Del ConcretoAgustín Mejía100% (2)
- Banco de Preguntas Fundaciones PDFDocumento6 páginasBanco de Preguntas Fundaciones PDFKandire Amaya MorónAún no hay calificaciones
- Arcos y Cables Estructuras PDFDocumento29 páginasArcos y Cables Estructuras PDFRoly Atao RojasAún no hay calificaciones
- Construccion de Muro de Contencion y DrenajesDocumento29 páginasConstruccion de Muro de Contencion y DrenajesChad PenningtonAún no hay calificaciones
- SESION 07a - Diseño de Muro de Gravedad y en VoladizoDocumento21 páginasSESION 07a - Diseño de Muro de Gravedad y en VoladizoGeison Campos Baltazar100% (1)
- Ejercicio de AplicaciónDocumento7 páginasEjercicio de Aplicaciónayrton_valenciaAún no hay calificaciones
- Pavimentos de Concreto Armado Con Barras TransversalesDocumento12 páginasPavimentos de Concreto Armado Con Barras TransversalesLucio SifuentesAún no hay calificaciones
- Esfuerzos y DeformacionesDocumento16 páginasEsfuerzos y DeformacionesJuan Carlos Escobar SantibáñezAún no hay calificaciones
- Flujo Gradualmente VariadoDocumento11 páginasFlujo Gradualmente VariadoLiliana Blas RojasAún no hay calificaciones
- CALCULO DE MOMENTOS EN VIGAS HIPERESTÁTICAS POR EL MÉTODO DE CROSSDocumento11 páginasCALCULO DE MOMENTOS EN VIGAS HIPERESTÁTICAS POR EL MÉTODO DE CROSSRiqii PerezAún no hay calificaciones
- Monografía Completa Riesgo Sísmico Grupo 07Documento26 páginasMonografía Completa Riesgo Sísmico Grupo 07Casaverde JimmyAún no hay calificaciones
- Informe Practica Calificada T2 - Grupo 5Documento52 páginasInforme Practica Calificada T2 - Grupo 5Antonio VargasAún no hay calificaciones
- Condensacion Estatica PDFDocumento6 páginasCondensacion Estatica PDFMarcoAntonioLunaLopezAún no hay calificaciones
- Análisis de sistemas estructurales determinadosDocumento25 páginasAnálisis de sistemas estructurales determinadosCarlos BravoAún no hay calificaciones
- Pórticos IsostáticosDocumento14 páginasPórticos IsostáticosMaickel Andreushito Vásquez Beltrán50% (2)
- Teoria Diseño de Cimentaciones de IntroduccionDocumento20 páginasTeoria Diseño de Cimentaciones de IntroduccionALCIDES LUIS FABIAN BRA�EZAún no hay calificaciones
- Informe Mecanica Vigas HiperDocumento12 páginasInforme Mecanica Vigas HiperPaul QuimbiambaAún no hay calificaciones
- Construcción con Bloques de HormigónDocumento11 páginasConstrucción con Bloques de HormigónRodrigo Sorrequieta100% (1)
- Resumen Del Curso de CimentacionesDocumento24 páginasResumen Del Curso de CimentacionesMaxwel Diaz MongeAún no hay calificaciones
- Presion Lateral Del Suelo ExposicionDocumento11 páginasPresion Lateral Del Suelo ExposicionPaul Castillo WongAún no hay calificaciones
- AngeDocumento2 páginasAngeNaftali Peña0% (1)
- Teorias de Capacidad de Carga en Suelos Julio GuzmanDocumento27 páginasTeorias de Capacidad de Carga en Suelos Julio GuzmanJulioGuzmanAún no hay calificaciones
- Marco Teorico TerminadoDocumento79 páginasMarco Teorico TerminadoAnonymous Twf6Ej7CVAún no hay calificaciones
- Curva ElásticaDocumento3 páginasCurva Elásticaeliana alarconAún no hay calificaciones
- Zapata ExcentDocumento42 páginasZapata ExcentFabiaJavierRoque100% (1)
- NTE-E0.50 Suelos y CimentacionesDocumento4 páginasNTE-E0.50 Suelos y CimentacionesYazmin DueñasAún no hay calificaciones
- Informe RM (Primer Avance)Documento9 páginasInforme RM (Primer Avance)RENAN EDWIN SALAZAR PELAEZ100% (1)
- Cimentaciones SuperficialesDocumento14 páginasCimentaciones SuperficialesmarlexirAún no hay calificaciones
- Vulnerabilidad Sísmica en Ciudad de VictoriaDocumento11 páginasVulnerabilidad Sísmica en Ciudad de VictoriaEDWIN DIEGO POBLETE UCHARICOAún no hay calificaciones
- Conducciones A Superficie Libre CanalesDocumento17 páginasConducciones A Superficie Libre CanalesIRReyesAún no hay calificaciones
- Vigas Como Elementos Estructurales UCVDocumento17 páginasVigas Como Elementos Estructurales UCVGianFranco Castro CalvoAún no hay calificaciones
- Diseño de losas en una dimensiónDocumento10 páginasDiseño de losas en una dimensiónPablo Gyllen NaeterAún no hay calificaciones
- Diseño de Caida VerticalDocumento26 páginasDiseño de Caida VerticalJean PierreAún no hay calificaciones
- METODO DE LA DOBLE INTEGRACION 4 EjerciciosDocumento15 páginasMETODO DE LA DOBLE INTEGRACION 4 EjerciciosFrank SiAún no hay calificaciones
- Laboratorio de Granulometria 2015Documento3 páginasLaboratorio de Granulometria 2015Casafranca NilAún no hay calificaciones
- Procedimientos para compactar, acabar y curar concretoDocumento13 páginasProcedimientos para compactar, acabar y curar concretoJerson AyalaAún no hay calificaciones
- Codigos de ConstrucciónDocumento4 páginasCodigos de ConstrucciónMaria GuamanAún no hay calificaciones
- Concreto Del Siglo XxiDocumento83 páginasConcreto Del Siglo XxiDeyvi HuanshaAún no hay calificaciones
- Condensación estática y matrices de rigidez de barras desconectadasDocumento5 páginasCondensación estática y matrices de rigidez de barras desconectadasAlex Manchay LopezAún no hay calificaciones
- UNIDAD II - Energia de DeformacionDocumento49 páginasUNIDAD II - Energia de DeformacionCamiloIdárragaAún no hay calificaciones
- Variación de La Permeabilidad Según La Textura Del SueloDocumento1 páginaVariación de La Permeabilidad Según La Textura Del SuelocedoceAún no hay calificaciones
- Laboratorio de Compresion de Maderas PDFDocumento13 páginasLaboratorio de Compresion de Maderas PDFMarquito34100% (1)
- Informe Sobre El PuenteDocumento2 páginasInforme Sobre El PuenteCarlos Manuel Puche PelaezAún no hay calificaciones
- Tipos de concreto y sus característicasDocumento15 páginasTipos de concreto y sus característicasNeider MEJIA MARTINEZAún no hay calificaciones
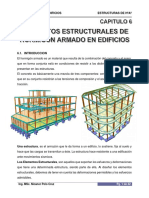
- Cap. 6 Elementos Estructurales de Hºaº - FinalDocumento42 páginasCap. 6 Elementos Estructurales de Hºaº - FinalChoque DanyelaAún no hay calificaciones
- Ensayo de Corte Directo en Suelos FriccionantesDocumento5 páginasEnsayo de Corte Directo en Suelos FriccionantesAlonso RSAún no hay calificaciones
- COLUMNASDocumento21 páginasCOLUMNASPaúl Josué Tiznado CanazaAún no hay calificaciones
- Tipos de Aisladores SismicosDocumento5 páginasTipos de Aisladores SismicosHector Percy Guerra Palomino50% (2)
- 2.5. Gravedad Especifica Del CementoDocumento6 páginas2.5. Gravedad Especifica Del CementocristinaAún no hay calificaciones
- Tipos de Asentamientos-GeotecniaDocumento13 páginasTipos de Asentamientos-GeotecniaMelvin ArciaAún no hay calificaciones
- Informe Centro de RigidezDocumento12 páginasInforme Centro de RigidezKevin Morales BuAún no hay calificaciones
- Conclusiones Mecanica de SuelosDocumento2 páginasConclusiones Mecanica de SuelosALEXIS ABAD GARCIAAún no hay calificaciones
- Teoria de La RigidezDocumento3 páginasTeoria de La Rigidezromeo santos garciaAún no hay calificaciones
- Rigidez A La FlexiónDocumento12 páginasRigidez A La Flexiónmarco damian laura0% (1)
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Examen 15% Tercer CorteDocumento2 páginasExamen 15% Tercer CorteDenyAún no hay calificaciones
- Munual de MantenimientoDocumento19 páginasMunual de MantenimientoDenyAún no hay calificaciones
- Sistema de Entrepis Cncret ArmadDocumento1 páginaSistema de Entrepis Cncret ArmadDenyAún no hay calificaciones
- Munual de MantenimientoDocumento19 páginasMunual de MantenimientoDenyAún no hay calificaciones
- 100200Documento1 página100200DenyAún no hay calificaciones
- EnsayDocumento2 páginasEnsayDenyAún no hay calificaciones
- Examen 15% Tercer CorteDocumento2 páginasExamen 15% Tercer CorteDenyAún no hay calificaciones
- 094810Documento1 página094810DenyAún no hay calificaciones
- Examen de Ferrocarriles Unidad 3 III CORTEDocumento2 páginasExamen de Ferrocarriles Unidad 3 III CORTEAngelo AguirreAún no hay calificaciones
- Trabajo Metodo AntisismicoDocumento15 páginasTrabajo Metodo AntisismicoDenyAún no hay calificaciones
- EnsayDocumento2 páginasEnsayDenyAún no hay calificaciones
- Ejercicio Metodo PendienteDocumento28 páginasEjercicio Metodo PendienteDenyAún no hay calificaciones
- Medidas PreventivasDocumento3 páginasMedidas PreventivasDenyAún no hay calificaciones
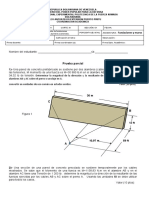
- PRUEBA PARCIAL 2 Corte HidraulicaDocumento2 páginasPRUEBA PARCIAL 2 Corte HidraulicaDenyAún no hay calificaciones
- Deformaciones Del ConcretoDocumento3 páginasDeformaciones Del ConcretoDenyAún no hay calificaciones
- Histria PuenteDocumento14 páginasHistria PuenteDenyAún no hay calificaciones
- Deformaciones Del ConcretoDocumento3 páginasDeformaciones Del ConcretoDenyAún no hay calificaciones
- El Analisis EstructuralDocumento2 páginasEl Analisis EstructuralDenyAún no hay calificaciones
- Trabaj Fundacin 3 CrteDocumento17 páginasTrabaj Fundacin 3 CrteDenyAún no hay calificaciones
- TRANSPORTE, Vaciad, CmpactacinDocumento2 páginasTRANSPORTE, Vaciad, CmpactacinDenyAún no hay calificaciones
- Ensayo Marco LegalDocumento5 páginasEnsayo Marco LegalDenyAún no hay calificaciones
- Linea de TiempDocumento4 páginasLinea de TiempDenyAún no hay calificaciones
- PresaDocumento2 páginasPresaDenyAún no hay calificaciones
- TRANSPORTE, Vaciad, CmpactacinDocumento2 páginasTRANSPORTE, Vaciad, CmpactacinDenyAún no hay calificaciones
- PresaDocumento2 páginasPresaDenyAún no hay calificaciones
- El Analisis EstructuralDocumento2 páginasEl Analisis EstructuralDenyAún no hay calificaciones
- Significado de La RiguidezDocumento2 páginasSignificado de La RiguidezDenyAún no hay calificaciones
- SISMO Fallas en VenezuelaDocumento2 páginasSISMO Fallas en VenezuelaDenyAún no hay calificaciones
- Sismo Máximo Intensidad y MagnitudDocumento2 páginasSismo Máximo Intensidad y MagnitudDenyAún no hay calificaciones
- SISMO Fallas en VenezuelaDocumento2 páginasSISMO Fallas en VenezuelaDenyAún no hay calificaciones
- La masturbación: Un enfoque bíblicoDocumento3 páginasLa masturbación: Un enfoque bíblicoIpuc Salonica Formados Para FormarAún no hay calificaciones
- Reporte de Voladura Opermin 07-12 PDFDocumento1 páginaReporte de Voladura Opermin 07-12 PDFanon_721871547Aún no hay calificaciones
- Examen Final RecursosDocumento5 páginasExamen Final RecursosandyrodririosAún no hay calificaciones
- El Tratado de Tordesillas - Una Revolución EspecialDocumento32 páginasEl Tratado de Tordesillas - Una Revolución EspecialMarcelhus Friedrich HielscherAún no hay calificaciones
- Diapositivas - Sistema CardiovascularDocumento20 páginasDiapositivas - Sistema Cardiovascularvaleria100% (2)
- Prueba Mundo Paralelo de RocíoDocumento11 páginasPrueba Mundo Paralelo de RocíoPrimer BásicoAún no hay calificaciones
- Diagnostico MARIFERDocumento9 páginasDiagnostico MARIFERCarlos I. ChavezAún no hay calificaciones
- DistociasDocumento15 páginasDistociasCamila FragaAún no hay calificaciones
- 10sistema 3300 Bently Nevada. ImpresoDocumento31 páginas10sistema 3300 Bently Nevada. ImpresoGustavoCruz83% (6)
- Actividad-2 Circuito RCRCDocumento4 páginasActividad-2 Circuito RCRCMiguel CorreaAún no hay calificaciones
- Lanaseve PG 026 V.03Documento4 páginasLanaseve PG 026 V.03gabypadAún no hay calificaciones
- Informe de Metrologia Fabritzio NinaDocumento14 páginasInforme de Metrologia Fabritzio NinaFabritzio- KunAún no hay calificaciones
- Radiación Solar Su Proceso de ConvenciónDocumento17 páginasRadiación Solar Su Proceso de ConvenciónAngeles MedinaAún no hay calificaciones
- Ensayo Historia de Los CostosDocumento7 páginasEnsayo Historia de Los CostosTrebol AlonsoAún no hay calificaciones
- Ejercicos Resueltos Unidad 2.1Documento15 páginasEjercicos Resueltos Unidad 2.1Karen GarciaAún no hay calificaciones
- Respuestas Tema 1Documento8 páginasRespuestas Tema 1Facu Paredes100% (1)
- Oferta y DemandaDocumento4 páginasOferta y DemandaRicardo GutierrezAún no hay calificaciones
- Memoria 2 Riesgos MecanicosDocumento11 páginasMemoria 2 Riesgos Mecanicossandra legardaAún no hay calificaciones
- Septima de DominanteDocumento8 páginasSeptima de DominanteNoel Leandro Ramirez Rivera100% (1)
- Apunte - Lubricantes PDFDocumento50 páginasApunte - Lubricantes PDFWAún no hay calificaciones
- Comunicación Asertiva desde la Inteligencia EmocionalDocumento25 páginasComunicación Asertiva desde la Inteligencia EmocionalMónica Reneé SoriaAún no hay calificaciones
- Acertijos LogicosDocumento3 páginasAcertijos LogicosferdinandcruzAún no hay calificaciones
- Documento - Final - Trabajo - de - Grado - Juan - Bertel 1Documento177 páginasDocumento - Final - Trabajo - de - Grado - Juan - Bertel 1franciscoAún no hay calificaciones
- Los Tópicos Esenciales de La EvaluaciónDocumento2 páginasLos Tópicos Esenciales de La EvaluaciónCatalina Diaz AñazcoAún no hay calificaciones
- Evolución Histórica de La Tutela Jurisdiccional Del Derecho de AlimentosDocumento34 páginasEvolución Histórica de La Tutela Jurisdiccional Del Derecho de AlimentosemelyAún no hay calificaciones
- Servicio de EnergiaDocumento2 páginasServicio de EnergiaBuscas InmobiliariaAún no hay calificaciones
- Evidencia 3 Informe Resultados FinancierosDocumento13 páginasEvidencia 3 Informe Resultados FinancierosSTEVEN AMORTEGUI100% (1)
- PUC-E Postgrado Ensayo The DoctorDocumento2 páginasPUC-E Postgrado Ensayo The DoctorAndrea EspinozaAún no hay calificaciones
- Certificado Propiedad ElectronicaDocumento1 páginaCertificado Propiedad ElectronicaFrancisco RosalesAún no hay calificaciones
- Venezuela Puerta de Entrada de SuraméricaDocumento1 páginaVenezuela Puerta de Entrada de SuraméricaJose Alejandro Pulido Jimenez100% (1)