También podría gustarte
- Conjunto de Los Números Racionales para Sexto de PrimariaDocumento6 páginasConjunto de Los Números Racionales para Sexto de PrimariaKaren BasilioAún no hay calificaciones
- HW 7Documento2 páginasHW 7Yesid AlmanzaAún no hay calificaciones
- Cuadrilatero, Elementos Finitos.Documento6 páginasCuadrilatero, Elementos Finitos.miguel orlando monroy rodriguezAún no hay calificaciones
- Tpnº 7Documento8 páginasTpnº 7Marcelo Valentín AriasAún no hay calificaciones
- 1) Algebra - Semana 01Documento4 páginas1) Algebra - Semana 01VYPAU 18Aún no hay calificaciones
- SESION 6-CONTEO 2021-2-TeoriaDocumento15 páginasSESION 6-CONTEO 2021-2-TeoriaAdrian HMAún no hay calificaciones
- Solucionario 12 Feb Uni 2024 1Documento43 páginasSolucionario 12 Feb Uni 2024 1LUIS ALBERTO SANABRIA BARZOLAAún no hay calificaciones
- Algebra Anual - Uni Sem01 Teoría de ExponentesDocumento5 páginasAlgebra Anual - Uni Sem01 Teoría de ExponentesBrayan AriasAún no hay calificaciones
- Examenes Complejos Resueltos PDFDocumento9 páginasExamenes Complejos Resueltos PDFVanAún no hay calificaciones
- Ejercicios Examenes Complejos ResueltosDocumento9 páginasEjercicios Examenes Complejos ResueltosCentro de Estudios Waldorf Sevilla Blanca PalomaAún no hay calificaciones
- Tema Nº02-Álgebra-Viii Unidad - 4° Año-Data-2023Documento1 páginaTema Nº02-Álgebra-Viii Unidad - 4° Año-Data-2023VALENTINO VARGASAún no hay calificaciones
- Examen de Tercera Unidad - Ind5 - Ind6Documento3 páginasExamen de Tercera Unidad - Ind5 - Ind6Edward Tejada SaldañaAún no hay calificaciones
- Proyecto Final de Hidraulica y NeumaticaDocumento21 páginasProyecto Final de Hidraulica y NeumaticaJosue LazoAún no hay calificaciones
- P5 Sol - Hoja5Pb4 - 2018 - 19Documento2 páginasP5 Sol - Hoja5Pb4 - 2018 - 19Juan PerezAún no hay calificaciones
- Taller No. 3 Solucion Cruce de SeñalesDocumento5 páginasTaller No. 3 Solucion Cruce de SeñalesNICOLAS ESTEBAN PAREDES ORGANISTAAún no hay calificaciones
- Algebra PMDDocumento11 páginasAlgebra PMDHuayllani Laurente AlejandroAún no hay calificaciones
- 3ee21 2 1221Documento4 páginas3ee21 2 1221Ana Karen Moreno VillanuevaAún no hay calificaciones
- PRACTICA TALLER NEUMÁTICO 6 Con SoluciónDocumento3 páginasPRACTICA TALLER NEUMÁTICO 6 Con SoluciónMarcos TobiasAún no hay calificaciones
- Intersección Plano Y LíneaDocumento1 páginaIntersección Plano Y Líneacamiloaricapa59Aún no hay calificaciones
- Deber 1Documento2 páginasDeber 1Rogger ArceAún no hay calificaciones
- Deber1 PDFDocumento2 páginasDeber1 PDFRogger ArceAún no hay calificaciones
- 6 MatricesDocumento3 páginas6 MatricesLuis Carlos LealAún no hay calificaciones
- Semana 03 Binomio de NewtonDocumento3 páginasSemana 03 Binomio de Newton01-IC-FC-MARIA FERNANDA CAMARENA YARIHUAMANAún no hay calificaciones
- Algebra-2018 - IiDocumento25 páginasAlgebra-2018 - IiPedro Antonio Vargas RubioAún no hay calificaciones
- TP 4 Matrices 2012 PDFDocumento6 páginasTP 4 Matrices 2012 PDFJuliAún no hay calificaciones
- Semana 15 Mate 1Documento4 páginasSemana 15 Mate 1Alejandra Huayta PariAún no hay calificaciones
- Algebra 2 SecundariaDocumento4 páginasAlgebra 2 Secundariamanuel alonso timana saucedoAún no hay calificaciones
- Inacap - Mate II - Matrices y Vectores Unidad III y IV PDFDocumento40 páginasInacap - Mate II - Matrices y Vectores Unidad III y IV PDFKika Cortes GalleguillosAún no hay calificaciones
- Producto Escalar-MatricialDocumento2 páginasProducto Escalar-MatricialNots Genesis LoganAún no hay calificaciones
- Algebra Preuniversitario 600 Ejercicios Resueltos AMOR A SOFIA PDFDocumento148 páginasAlgebra Preuniversitario 600 Ejercicios Resueltos AMOR A SOFIA PDFPatricia Del Castillo RamírezAún no hay calificaciones
- Derivadas y Grafos PDFDocumento4 páginasDerivadas y Grafos PDFFermin GonzalezAún no hay calificaciones
- Practico 1 Preupsa2022Documento3 páginasPractico 1 Preupsa2022c9090opopAún no hay calificaciones
- 1° Trinidad - Matemática - 27-04-21Documento3 páginas1° Trinidad - Matemática - 27-04-21Anaira SomarAún no hay calificaciones
- PF 2012-1Documento2 páginasPF 2012-1Luis Abel Zapata JimenezAún no hay calificaciones
- Solucion Ex Final 2020 IDocumento8 páginasSolucion Ex Final 2020 IJordy AlvaradoAún no hay calificaciones
- Solucion Ex Final 2020 IDocumento8 páginasSolucion Ex Final 2020 IJordy AlvaradoAún no hay calificaciones
- Práctica DeterminantesDocumento7 páginasPráctica DeterminantesNiar ZommAún no hay calificaciones
- An 05 Algebra Lineal NumericaDocumento50 páginasAn 05 Algebra Lineal Numericajoelcxc25gmailcomAún no hay calificaciones
- Campo Electrico AplicacionesDocumento5 páginasCampo Electrico AplicacionesPipe CastilloAún no hay calificaciones
- P4 ResueltoDocumento8 páginasP4 ResueltoFran EstellerAún no hay calificaciones
- TP N°0-Connceptos PrelimirnaresDocumento3 páginasTP N°0-Connceptos Prelimirnarescordobafede43Aún no hay calificaciones
- Potenciacion y Radicacion de Fracciones para Sexto de PrimariaDocumento4 páginasPotenciacion y Radicacion de Fracciones para Sexto de PrimariaCarlos Arturo Martinez JuradoAún no hay calificaciones
- Eje Temático: NÚMEROS Unidad: Racionalización: Matemática MSN04-TDocumento10 páginasEje Temático: NÚMEROS Unidad: Racionalización: Matemática MSN04-TJorge Eduardo Rojas RiosAún no hay calificaciones
- SuperficiesDocumento8 páginasSuperficiesJuanita MerchánAún no hay calificaciones
- Unidad 4 Con EnlacesDocumento9 páginasUnidad 4 Con EnlacesKærlighedAún no hay calificaciones
- 11° - Pu2.1Documento3 páginas11° - Pu2.1cristoferalexandergarciaquezadAún no hay calificaciones
- Matemática Analítica 4 - Ma463 Examen Final EB Ciclo 2018-2Documento8 páginasMatemática Analítica 4 - Ma463 Examen Final EB Ciclo 2018-2Yoel Romero CapchaAún no hay calificaciones
- TEMA 1. Repaso Fracciones, Porencias y Raã Ces 2Documento15 páginasTEMA 1. Repaso Fracciones, Porencias y Raã Ces 2candnav14Aún no hay calificaciones
- Clase 22 - Algebra LinealDocumento2 páginasClase 22 - Algebra LinealJosePerezNarvaezAún no hay calificaciones
- Serie 4 Arboles y GrafosDocumento2 páginasSerie 4 Arboles y GrafosIramFloresAún no hay calificaciones
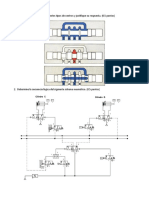
- Escriba El Nombre de Los Siguientes Tipos de Centros y Justifique Su Respuesta. (0.5 Puntos)Documento4 páginasEscriba El Nombre de Los Siguientes Tipos de Centros y Justifique Su Respuesta. (0.5 Puntos)Andrés PerezAún no hay calificaciones
- SECCION II. OPERACIONES CON MATRICES. 1er. P 2018 PDFDocumento13 páginasSECCION II. OPERACIONES CON MATRICES. 1er. P 2018 PDFAlejoAún no hay calificaciones
- Cuarto Secundaria ALGEBRADocumento24 páginasCuarto Secundaria ALGEBRAWilber Ardiles del ArroyoAún no hay calificaciones
- Hoja4-Álgebra Lineal 21-22Documento2 páginasHoja4-Álgebra Lineal 21-22100523954Aún no hay calificaciones
- Ecuación de La Recta, Paralelas y Perpendiculares 901Documento12 páginasEcuación de La Recta, Paralelas y Perpendiculares 901Sara leonor Gama villamilAún no hay calificaciones
- Taller No 1 EconometriaDocumento2 páginasTaller No 1 EconometriaLeasing RevolutionAún no hay calificaciones
- Alg. (05) Repaso 05 Factorial - Número Combinatorio y Binomio de Newton 05-11-20Documento2 páginasAlg. (05) Repaso 05 Factorial - Número Combinatorio y Binomio de Newton 05-11-20Naidelin vanesa Arteaga BurgosAún no hay calificaciones
- Guía 3 PotenciasDocumento3 páginasGuía 3 PotenciasFrancisco Javier Valenzuela Riquelme100% (1)
- Las matemáticas en la vida real: introducción básica al modelamiento matemáticoDe EverandLas matemáticas en la vida real: introducción básica al modelamiento matemáticoAún no hay calificaciones
- Presupuesto FinalDocumento35 páginasPresupuesto FinalMateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Listado de EquiposDocumento3 páginasListado de EquiposMateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Parte 3 - Descomposición Lu y CholeskyDocumento46 páginasParte 3 - Descomposición Lu y CholeskyMateo Felipe Ramirez Arbelaez100% (1)
- Péndulo Compuesto.Documento4 páginasPéndulo Compuesto.Mateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Clase 1 - Intro Matlab PDFDocumento61 páginasClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Prob Propuestos Oscilaciones, Cuerdas y Barras1.0 PDFDocumento4 páginasProb Propuestos Oscilaciones, Cuerdas y Barras1.0 PDFMateo Felipe Ramirez ArbelaezAún no hay calificaciones
- Introduccion Fem 2018 1Documento14 páginasIntroduccion Fem 2018 1Mateo Felipe Ramirez ArbelaezAún no hay calificaciones
- El Impacto Cultural de Lo QueDocumento3 páginasEl Impacto Cultural de Lo Quevictor1232cjAún no hay calificaciones
- ExamenAdmision2022-2 UNAMDocumento5 páginasExamenAdmision2022-2 UNAMMaria Del Mar López RendónAún no hay calificaciones
- Practik 33Documento7 páginasPractik 33yari ticonaAún no hay calificaciones
- Teoria Sobre Integrales Múltiples en Coordenadas PolaresDocumento4 páginasTeoria Sobre Integrales Múltiples en Coordenadas PolaresJessica CastanedaAún no hay calificaciones
- Quimica InorganicaDocumento175 páginasQuimica InorganicaraperezgarciaAún no hay calificaciones
- Clasificación de Formas CuadráticasDocumento3 páginasClasificación de Formas CuadráticasAlejandra Paola Pastrana CaraballoAún no hay calificaciones
- Armonicos EsfericosDocumento22 páginasArmonicos EsfericosEsteban Gomez91% (11)
- Eder Triveño 3 EjerciciosDocumento4 páginasEder Triveño 3 EjerciciosJvniOrTriveñoAún no hay calificaciones
- 9 T Cal3 2018Documento2 páginas9 T Cal3 2018Tau MinAún no hay calificaciones
- Planos ÁlgebraDocumento11 páginasPlanos ÁlgebraMacarena RavioloAún no hay calificaciones
- Informe FisicaDocumento4 páginasInforme FisicaFrancisco Orellana YañezAún no hay calificaciones
- Aplicaciones de Condesado de BoseDocumento4 páginasAplicaciones de Condesado de BoserichardAún no hay calificaciones
- Orbitas Estacionarias Según Modelo Atómico de BohrDocumento2 páginasOrbitas Estacionarias Según Modelo Atómico de BohrJoaquin Antonio Garcia Suarez100% (3)
- TF y Delta de DiracDocumento21 páginasTF y Delta de DiracDonGerardAún no hay calificaciones
- Fisica Moderna 4Documento4 páginasFisica Moderna 4Paul Guillen Peñarreta100% (1)
- Evolución Del Modelo AtómicoDocumento8 páginasEvolución Del Modelo AtómicoAnonymous a0VT7HAún no hay calificaciones
- Trayectoria Curvilinea PDFDocumento16 páginasTrayectoria Curvilinea PDFKevin Guzmán RiscoAún no hay calificaciones
- nt698 UniversoDocumento8 páginasnt698 UniversoSilvia Gonzalez CarreteroAún no hay calificaciones
- Geometría Analítica IDocumento3 páginasGeometría Analítica ICesar Ccoica Méndez0% (1)
- Campo Magnético Producido Por Una CorrienteDocumento4 páginasCampo Magnético Producido Por Una CorrientesalvadorAún no hay calificaciones
- 9U4Ecuacion Ordinaria de Una Elipse Vertical Con Centro Fuera Del OrigenDocumento4 páginas9U4Ecuacion Ordinaria de Una Elipse Vertical Con Centro Fuera Del Origenfernanda ferAún no hay calificaciones
- Ciencias8b Actividad2Documento9 páginasCiencias8b Actividad2Juan De Ahí100% (1)
- Escuela Superior Politécnica de ChimborazoDocumento21 páginasEscuela Superior Politécnica de ChimborazoMaikol Daniel PeruchoAún no hay calificaciones
- Biofotones y Energia QI - Albert PoppDocumento9 páginasBiofotones y Energia QI - Albert Poppgonzalez1Aún no hay calificaciones
- Resumen de Los VideosDocumento3 páginasResumen de Los VideosMarcos CanoAún no hay calificaciones
- 2 - TALLER - Teoría Atómica y Tabla PeriódicaDocumento3 páginas2 - TALLER - Teoría Atómica y Tabla Periódicalufer94Aún no hay calificaciones
- Miércoles Clase Química SemestralDocumento7 páginasMiércoles Clase Química SemestralFabian082Aún no hay calificaciones
- Vectores en El PlanoDocumento3 páginasVectores en El PlanoNataly ToribioAún no hay calificaciones
- OCW Tema 2 Transformada de Laplace PDFDocumento29 páginasOCW Tema 2 Transformada de Laplace PDFlobogris05Aún no hay calificaciones
- Termodinamica Practica 4Documento10 páginasTermodinamica Practica 4Emmanuel Martinez Hernandez100% (1)