También podría gustarte
- PendientesDocumento2 páginasPendientesAneuris Sosa HernandezAún no hay calificaciones
- Esta Di SticaDocumento1 páginaEsta Di SticaAneuris Sosa HernandezAún no hay calificaciones
- PROEMSETDocumento4 páginasPROEMSETAneuris Sosa HernandezAún no hay calificaciones
- Diseno-De-Un-Plan ImportanteeeeDocumento96 páginasDiseno-De-Un-Plan ImportanteeeeAneuris Sosa HernandezAún no hay calificaciones
- Analisis PestDocumento2 páginasAnalisis PestAneuris Sosa HernandezAún no hay calificaciones
- Analisis PestDocumento2 páginasAnalisis PestAneuris Sosa HernandezAún no hay calificaciones
- Pest y Foda - 1563803873Documento7 páginasPest y Foda - 1563803873Aneuris Sosa HernandezAún no hay calificaciones
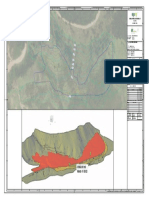
- Vista en Planta 3232 PDFDocumento1 páginaVista en Planta 3232 PDFAneuris Sosa HernandezAún no hay calificaciones
- Analisis ComparativoDocumento1 páginaAnalisis ComparativoAneuris Sosa HernandezAún no hay calificaciones
- Ejercicio 1Documento1 páginaEjercicio 1Aleja Delgado0% (1)
- Ecuaciones de ControlDocumento5 páginasEcuaciones de ControlAlexisd7t SosafgufgufAún no hay calificaciones
- DigitelDocumento1 páginaDigitelAneuris Sosa HernandezAún no hay calificaciones
- Balance TermicoDocumento4 páginasBalance TermicoAneuris Sosa HernandezAún no hay calificaciones
- Pejercicio Sustancias Puras Complete - HTMLDocumento1 páginaPejercicio Sustancias Puras Complete - HTMLAneuris Sosa HernandezAún no hay calificaciones
- Planta 1examen 2019-2Documento5 páginasPlanta 1examen 2019-2Aneuris Sosa HernandezAún no hay calificaciones
- Selección El Tipo de Sistema de BarrasDocumento5 páginasSelección El Tipo de Sistema de BarrasAneuris Sosa HernandezAún no hay calificaciones
- Regulacion de Turbina SemDocumento17 páginasRegulacion de Turbina SemAneuris Sosa HernandezAún no hay calificaciones
- Instalación de Un Sistema o Software de Planificación de Recursos EmpresarialesDocumento5 páginasInstalación de Un Sistema o Software de Planificación de Recursos EmpresarialesAneuris Sosa HernandezAún no hay calificaciones
- Induccion MutuaDocumento1 páginaInduccion MutuaAneuris Sosa HernandezAún no hay calificaciones
- Antropologia FisicaDocumento24 páginasAntropologia FisicaAneuris Sosa HernandezAún no hay calificaciones
- Regulacion de Turbina SemDocumento17 páginasRegulacion de Turbina SemAneuris Sosa HernandezAún no hay calificaciones
- Sobretensiones PDFDocumento7 páginasSobretensiones PDFWilliam100% (1)
- Ecuaciones de ControlDocumento5 páginasEcuaciones de ControlAlexisd7t SosafgufgufAún no hay calificaciones
- Diseño Subestación Paez - Datos y CalculosDocumento20 páginasDiseño Subestación Paez - Datos y CalculosmzaratejAún no hay calificaciones
- Segundo Borrador Decreto RLGEDocumento44 páginasSegundo Borrador Decreto RLGERoberto batistaAún no hay calificaciones
- Antropologia FisicaDocumento24 páginasAntropologia FisicaAneuris Sosa HernandezAún no hay calificaciones
- TDR Aislador Rgido 69 KV Porcelana ETED-CCC-LPN-2016-11Documento17 páginasTDR Aislador Rgido 69 KV Porcelana ETED-CCC-LPN-2016-11Aneuris Sosa HernandezAún no hay calificaciones
- Regulacion de TurbinaDocumento49 páginasRegulacion de TurbinaAneuris Sosa HernandezAún no hay calificaciones
- ActividadesDocumento4 páginasActividadesAneuris Sosa HernandezAún no hay calificaciones
- Formato Unidad 5Documento1 páginaFormato Unidad 5SLAVAún no hay calificaciones
- Ex Fnal Abastos 2022-0Documento3 páginasEx Fnal Abastos 2022-0GLENNIA CORNEJO ESPINOZAAún no hay calificaciones
- 12.12.22. - 2 Pedido de Compra Factor e & Construmar Sa de CVDocumento2 páginas12.12.22. - 2 Pedido de Compra Factor e & Construmar Sa de CVLuis TapiaAún no hay calificaciones
- Propiedad Intelectual: Abog. Griselda Georgina Reyes Lòpez UnicahDocumento46 páginasPropiedad Intelectual: Abog. Griselda Georgina Reyes Lòpez UnicahELIZABETH DANIELA FLORES SANTOSAún no hay calificaciones
- Requerimientos Funcionales y No FuncionalesDocumento9 páginasRequerimientos Funcionales y No FuncionalesjuanAún no hay calificaciones
- Informe TécnicoDocumento25 páginasInforme TécnicoFelipe Chablé100% (1)
- Problemas Resueltos TransformadoresDocumento159 páginasProblemas Resueltos Transformadorescallofduty ghostAún no hay calificaciones
- Transmision Automatica Sistemas Mecanico e Hidraulico Fase 2 PDFDocumento323 páginasTransmision Automatica Sistemas Mecanico e Hidraulico Fase 2 PDFluis perez santillan100% (1)
- Proporcionalidad Directa e InversaDocumento9 páginasProporcionalidad Directa e InversaelenAún no hay calificaciones
- Formulario para Trámites de Constancias y CertificacionesDocumento2 páginasFormulario para Trámites de Constancias y Certificacionesdaniel moralesAún no hay calificaciones
- Prid-318 TrabajofinalDocumento8 páginasPrid-318 TrabajofinalJOTA19 MENDOZAAún no hay calificaciones
- Actividad - Inventario Simapro CelularDocumento5 páginasActividad - Inventario Simapro CelularRobert AyalaAún no hay calificaciones
- Bloqueo de Energias Peligrosas 2020Documento76 páginasBloqueo de Energias Peligrosas 2020usuario grupohsec80% (5)
- Manual Estufa Sara AutoconstructoresDocumento32 páginasManual Estufa Sara AutoconstructoresRuben EsquireAún no hay calificaciones
- LevantamientoZodmeMarzo PlantaDocumento1 páginaLevantamientoZodmeMarzo PlantaJulian Andres Morales AristizabalAún no hay calificaciones
- Trabajo de EstudioDocumento3 páginasTrabajo de EstudioJason AlexanderAún no hay calificaciones
- Actores de La Cadena de AbastecimientoDocumento6 páginasActores de La Cadena de AbastecimientoOswaldo Jesus Castaño HenríquezAún no hay calificaciones
- Medidas de Dispersión (Estadistica)Documento15 páginasMedidas de Dispersión (Estadistica)Michelle HerreraAún no hay calificaciones
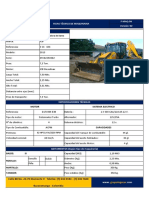
- F-MAQ-04 Ficha Tecnica Maquianaria Retrocargadora de Llanta JCB 3CXDocumento1 páginaF-MAQ-04 Ficha Tecnica Maquianaria Retrocargadora de Llanta JCB 3CXJohn MoralesAún no hay calificaciones
- LenguarazDocumento251 páginasLenguarazCarlos AlettoAún no hay calificaciones
- Informe MATER FEB 2023Documento30 páginasInforme MATER FEB 2023Jorge GomezAún no hay calificaciones
- Informe Pyr FinalDocumento17 páginasInforme Pyr FinaljuanAún no hay calificaciones
- 8 Metodología para La Solución de Problemas Por Medio de Computador BoletinDocumento11 páginas8 Metodología para La Solución de Problemas Por Medio de Computador Boletinje_rguez100% (3)
- PDF Tgmcatalogue DDDocumento20 páginasPDF Tgmcatalogue DDRafael RuizAún no hay calificaciones
- Nald-329 TrabajofinalDocumento9 páginasNald-329 TrabajofinalKr ChavezAún no hay calificaciones
- Esquema de GratificaciónDocumento11 páginasEsquema de GratificaciónAsiel MartínezAún no hay calificaciones
- Contrato MarciaDocumento15 páginasContrato MarciaJHOSSELYN MILAGROS MARTINEZ CHAPILLIQUENAún no hay calificaciones
- Cuadro Menu de ControlDocumento27 páginasCuadro Menu de ControlRaúl ViverosAún no hay calificaciones
- Aplicacion Distribucion WeibullDocumento10 páginasAplicacion Distribucion Weibullunknown__userAún no hay calificaciones
- Trabajo Grupal S2Documento5 páginasTrabajo Grupal S2Denilson AlegreAún no hay calificaciones