También podría gustarte
- Análisis Dinámico de Mecanismos 2021-1 - Sesion6Documento76 páginasAnálisis Dinámico de Mecanismos 2021-1 - Sesion6Walter Raul Valentin AlvarezAún no hay calificaciones
- Conociendo Cusco - INEIDocumento167 páginasConociendo Cusco - INEICiudades_PeruanasAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Ejercicio de Movimiento Relativo y Sist No InercialesDocumento6 páginasEjercicio de Movimiento Relativo y Sist No InercialesGuadalupeAún no hay calificaciones
- PERU - Mapa VialDocumento1 páginaPERU - Mapa VialÖko-Abenteuer Oxapampa-Asháninka-YáneshaAún no hay calificaciones
- Dinamica Cuerpo Rigido Version 2019 2 SemestreDocumento53 páginasDinamica Cuerpo Rigido Version 2019 2 SemestreDCaro DulceyAún no hay calificaciones
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Movimiento CircularDocumento38 páginasMovimiento CircularAngel StoneAún no hay calificaciones
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Actividad 2 Semana IIDocumento15 páginasActividad 2 Semana IILuis Angel Gárate ChambillaAún no hay calificaciones
- Dinamica D e Cuerpo RigidoDocumento24 páginasDinamica D e Cuerpo Rigidobecto67% (3)
- Practica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Documento7 páginasPractica 2B Analisis Cinematico de Aceleracion-1953550-Ima-Br104Abdiel MoralesAún no hay calificaciones
- Cinematica de Cuerpos RigidosDocumento63 páginasCinematica de Cuerpos RigidosHipolito MBAún no hay calificaciones
- PDF Beer Dinamica 9e Presentacion PPT c15Documento64 páginasPDF Beer Dinamica 9e Presentacion PPT c15Alberto Perdomo50% (2)
- Tema 4 Cinemc3a1tica Del Cuerpo RigidoDocumento84 páginasTema 4 Cinemc3a1tica Del Cuerpo RigidoRodolfoA.PaivaOjeda100% (1)
- S06.s1-Clase en VivoDocumento39 páginasS06.s1-Clase en VivoEdgar PerezAún no hay calificaciones
- Cinematica Plana de Un Cuerpo RigidoDocumento57 páginasCinematica Plana de Un Cuerpo RigidoMijhael Anatholi Romero Mamani100% (1)
- Cinematica Plana de Un Cuerpo Rigido PDFDocumento57 páginasCinematica Plana de Un Cuerpo Rigido PDFJonathanAndresAún no hay calificaciones
- Sesión 09 - Din - UgDocumento20 páginasSesión 09 - Din - UgFernando CastañedaAún no hay calificaciones
- Capitulo 7 - Cinemática de Cuerpo Rígido IIDocumento39 páginasCapitulo 7 - Cinemática de Cuerpo Rígido IIcristhian aaron vigo villarAún no hay calificaciones
- Semana 8 9Documento69 páginasSemana 8 9Howard Johann Gomez V100% (1)
- Trabajo Autónomo 4Documento7 páginasTrabajo Autónomo 4JorgeAún no hay calificaciones
- Semana 3 RevDocumento34 páginasSemana 3 Revkevin gasteluAún no hay calificaciones
- Capitulo 6 - Cinemática de Cuerpo Rígido IDocumento33 páginasCapitulo 6 - Cinemática de Cuerpo Rígido Icristhian aaron vigo villarAún no hay calificaciones
- Clase 11 Aceleracion UTPDocumento21 páginasClase 11 Aceleracion UTPcorpses88Aún no hay calificaciones
- Cinematica MecánicaDocumento43 páginasCinematica MecánicaAmIn20122Aún no hay calificaciones
- Cinematic ADocumento24 páginasCinematic AJairo Manuel Saavedra AcostaAún no hay calificaciones
- Laboratorio 5Documento5 páginasLaboratorio 5Jose ChoqueAún no hay calificaciones
- Cuerpo RigidoDocumento5 páginasCuerpo RigidoronaldAún no hay calificaciones
- Movimiento Circular 2018Documento16 páginasMovimiento Circular 2018JUAN SEBASTIAN CORNEJO RAMIREZAún no hay calificaciones
- 7) Movimiento CircularDocumento15 páginas7) Movimiento CircularDaniel SegoviaAún no hay calificaciones
- Cinematica Del SolidoDocumento5 páginasCinematica Del SolidoPEDRO DE LA CRUZ CASTILLOAún no hay calificaciones
- SELECCION (CIR) Centro Instantaneo de RotacionDocumento10 páginasSELECCION (CIR) Centro Instantaneo de RotacionNaice MustanAún no hay calificaciones
- 634694814233008750Documento29 páginas634694814233008750Kasumi ZcreamAún no hay calificaciones
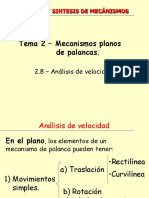
- Tema 2 - Segunda Parte. Análisis Cinemático de Mecanismos PlanosDocumento38 páginasTema 2 - Segunda Parte. Análisis Cinemático de Mecanismos Planosalbertocc1978100% (1)
- 11bcs-Mecanismos - Problemas - 2 - 2 Analisis de VelocidadesDocumento12 páginas11bcs-Mecanismos - Problemas - 2 - 2 Analisis de VelocidadesVerónicaMhAún no hay calificaciones
- Sesión 2 MovRot InteractivoDocumento26 páginasSesión 2 MovRot InteractivoAlex TorpocoAún no hay calificaciones
- Dinamica G4Documento15 páginasDinamica G4Jose Manuel Campos RiveraAún no hay calificaciones
- Preguntas y Problemas Cap.9Documento9 páginasPreguntas y Problemas Cap.9lopezgamezalexanderAún no hay calificaciones
- Semana 3Documento20 páginasSemana 3Elton MartinezAún no hay calificaciones
- 7 RígidosDocumento24 páginas7 Rígidosgonzo212Aún no hay calificaciones
- S02 - s1 Componentes RectangularesDocumento26 páginasS02 - s1 Componentes RectangularesElio Eduardo Escribano PimentelAún no hay calificaciones
- B Problemas CinematicaDocumento19 páginasB Problemas Cinematicajavi205Aún no hay calificaciones
- Formulario Cinemática Del Cuerpo Rígido-ZuritaDocumento4 páginasFormulario Cinemática Del Cuerpo Rígido-ZuritaLucía ZuritaAún no hay calificaciones
- UntitledDocumento10 páginasUntitledTito VilchezAún no hay calificaciones
- Apuntes Tema 6Documento53 páginasApuntes Tema 6ismaelAún no hay calificaciones
- Presentacion Fis401 Clase9 RotacionDocumento24 páginasPresentacion Fis401 Clase9 RotacionpatricioAún no hay calificaciones
- SESIÓN 08 - Cinemática Plana de Un Cuerpo Rígido Velocidad Absoluta y Relativa, Centro Instantáneo de Velocidad Cero, AceleracióDocumento24 páginasSESIÓN 08 - Cinemática Plana de Un Cuerpo Rígido Velocidad Absoluta y Relativa, Centro Instantáneo de Velocidad Cero, AceleracióLeandro Guillen AguilarAún no hay calificaciones
- Ejercicios Tema 3Documento24 páginasEjercicios Tema 3Tristan Villanueva CoutiñoAún no hay calificaciones
- 2016-01 F I Semana 04 PDFDocumento69 páginas2016-01 F I Semana 04 PDFluisAún no hay calificaciones
- S09.s01.Movimiento Alrededor de Un Punto FijoDocumento16 páginasS09.s01.Movimiento Alrededor de Un Punto FijoRodolfo Toro QuiroZAún no hay calificaciones
- 07 VelocidadDocumento56 páginas07 VelocidadJORGE EDUARDO DE LA OSSA DORIAAún no hay calificaciones
- Analisis de AceleraciónDocumento33 páginasAnalisis de AceleraciónJunior Paucar AnccoAún no hay calificaciones
- Movimiento Circular Uniformemente VariadoDocumento15 páginasMovimiento Circular Uniformemente VariadoSergio Gtz100% (1)
- Cinem Cuerpos Rigidos MG Plano 1Documento23 páginasCinem Cuerpos Rigidos MG Plano 1Samantha Mallerly Villalta PomaAún no hay calificaciones
- Movimiento Relativo A Ejes RotantesDocumento42 páginasMovimiento Relativo A Ejes RotantesCarlos Alfaro HerreraAún no hay calificaciones
- Examen TipoDocumento1 páginaExamen TipodavidAún no hay calificaciones
- Dinamica BeerDocumento23 páginasDinamica BeerYeampier Pariente100% (1)
- Movimiento en Dos DimensionesDocumento39 páginasMovimiento en Dos DimensionesCesar Segales Hillpa100% (1)
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Acta de Sesión de Orientación Formato 2Documento35 páginasActa de Sesión de Orientación Formato 2Cathy ValenciaAún no hay calificaciones
- Informe Cheque Mario QuinayaDocumento2 páginasInforme Cheque Mario QuinayaCathy ValenciaAún no hay calificaciones
- Programa Oficial de Fiestas Del Cusco - WebDocumento49 páginasPrograma Oficial de Fiestas Del Cusco - WebCathy ValenciaAún no hay calificaciones
- Requisitos para PostulantesDocumento2 páginasRequisitos para PostulantesCathy ValenciaAún no hay calificaciones
- EDT de Una BibliotecaDocumento1 páginaEDT de Una BibliotecaCathy ValenciaAún no hay calificaciones
- Folleto FIFADocumento16 páginasFolleto FIFACathy ValenciaAún no hay calificaciones
- Excel CanalesDocumento8 páginasExcel CanalesCathy ValenciaAún no hay calificaciones
- Suelos IiDocumento20 páginasSuelos IiCathy Valencia60% (5)
- La Técnica EFGHIDocumento3 páginasLa Técnica EFGHICathy ValenciaAún no hay calificaciones
- Tecnicas de EstudioDocumento81 páginasTecnicas de EstudioCathy ValenciaAún no hay calificaciones
- Cinematica TAREA 3Documento8 páginasCinematica TAREA 3Edgar Castillo DelgadoAún no hay calificaciones
- Practica #2 FIS-219-P-074Documento12 páginasPractica #2 FIS-219-P-074César Rafael MinayaAún no hay calificaciones
- Calculo de Velocidad de OndaDocumento7 páginasCalculo de Velocidad de OndaJ-Luis RodriguezAún no hay calificaciones
- Sesión Con El Facilitador - Semana 1 - Módulo 19Documento38 páginasSesión Con El Facilitador - Semana 1 - Módulo 19Ismael LeeAún no hay calificaciones
- Ficha McuDocumento2 páginasFicha Mcuisaki27Aún no hay calificaciones
- Clases de Fuerzas en La NaturalezaDocumento5 páginasClases de Fuerzas en La NaturalezaJuan Juuzou SuzuyaAún no hay calificaciones
- Solucionario SERWAY 8VA EDICIONDocumento5 páginasSolucionario SERWAY 8VA EDICIONgustavofra100% (1)
- Clase 4 Guía Del Alumno Segundo Medio MAS NEMDocumento12 páginasClase 4 Guía Del Alumno Segundo Medio MAS NEMValeria JimenezAún no hay calificaciones
- Sa, MNDFM, AdsDocumento4 páginasSa, MNDFM, AdsyoiAún no hay calificaciones
- Tabla Comparativa de Las Ecuaciones Del MovimientoDocumento1 páginaTabla Comparativa de Las Ecuaciones Del MovimientoCristian Escrihuela Benages100% (1)
- Informe Laboratorios Fisica N 3Documento6 páginasInforme Laboratorios Fisica N 3Jani EscoAún no hay calificaciones
- Plan de Mejoramiento de Fisica 2 Periodo 11Documento2 páginasPlan de Mejoramiento de Fisica 2 Periodo 11Oscar Julian AcostaAún no hay calificaciones
- S03.s2 - Separata de ClaseDocumento16 páginasS03.s2 - Separata de ClaseJotacheq NacionalAún no hay calificaciones
- Universidad Nacional Del Altiplano PunoDocumento10 páginasUniversidad Nacional Del Altiplano PunoAnonymous H1Tv1hAún no hay calificaciones
- Semana 7 Seminario IIDocumento102 páginasSemana 7 Seminario IIANTONELLA AREVALO LOZANOAún no hay calificaciones
- Caida LibreDocumento2 páginasCaida LibreHermogenes Perfecto Micha Nze NsangAún no hay calificaciones
- Manual de Transformadores Tomo IDocumento130 páginasManual de Transformadores Tomo IJuan CarlosAún no hay calificaciones
- Modulo 1 Sistemas Electricos CceDocumento38 páginasModulo 1 Sistemas Electricos CceEduardo Aliaga VegaAún no hay calificaciones
- Movimiento en Un Campo Eléctrico FinalizadoDocumento7 páginasMovimiento en Un Campo Eléctrico FinalizadoTrap juanAún no hay calificaciones
- Análisis Prueba Saber Fisica 10Documento1 páginaAnálisis Prueba Saber Fisica 10ESTIVINSON PALACIOS0% (1)
- Taller Complet 1corteDocumento4 páginasTaller Complet 1corteDaniel L RabaAún no hay calificaciones
- Conservacion de Momento LinealDocumento4 páginasConservacion de Momento LinealJose Reyes EscobarAún no hay calificaciones
- Proyecto de Transformador ElectricoDocumento10 páginasProyecto de Transformador ElectricoChristian DíazAún no hay calificaciones
- Física 1 Simulacro Parcial 2Documento3 páginasFísica 1 Simulacro Parcial 2Antonio CasasAún no hay calificaciones
- Ejercicio 12.1.7. y 3Documento5 páginasEjercicio 12.1.7. y 3Cesar Linarez ChavezAún no hay calificaciones
- Rejas Leonardo Lab7 Par3Documento4 páginasRejas Leonardo Lab7 Par3Jesus angel Paco quispeAún no hay calificaciones
- Practica de Fisica 2Documento17 páginasPractica de Fisica 2yensy morel ureñaAún no hay calificaciones
- Introducción y Reconocimiento de TransformadoresDocumento7 páginasIntroducción y Reconocimiento de TransformadoresBrayan Alexis Ruiz OjedaAún no hay calificaciones
- Semana 5 - Edades y MovilesDocumento7 páginasSemana 5 - Edades y MovileserickkAún no hay calificaciones