También podría gustarte
- Ejemplo R 4Documento4 páginasEjemplo R 4Aldair DomínguezAún no hay calificaciones
- CV María José Carreón OrtegaDocumento3 páginasCV María José Carreón OrtegaAldair DomínguezAún no hay calificaciones
- Organigrama Actual PUMATICsDocumento1 páginaOrganigrama Actual PUMATICsAldair DomínguezAún no hay calificaciones
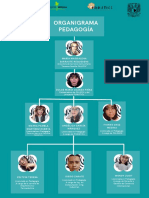
- Organigrama PedagogíaDocumento1 páginaOrganigrama PedagogíaAldair DomínguezAún no hay calificaciones
- Valor Del Dinero en El Tiempo y Equivalencia EconómicaDocumento2 páginasValor Del Dinero en El Tiempo y Equivalencia EconómicaAldair DomínguezAún no hay calificaciones
- Resumen Capitulo 1 "De Salinas A Fox"Documento2 páginasResumen Capitulo 1 "De Salinas A Fox"Aldair DomínguezAún no hay calificaciones
- Parcial 1 CompuDocumento20 páginasParcial 1 CompuTobe Dc50% (2)
- 1.5 - PPA Primera Etapa Ecosistema MarinoDocumento7 páginas1.5 - PPA Primera Etapa Ecosistema Marinojavier alexisAún no hay calificaciones
- Buen Uso Del LaboratorioDocumento6 páginasBuen Uso Del Laboratoriobelen_reija_otero5038Aún no hay calificaciones
- Experimentos ADN.Documento4 páginasExperimentos ADN.Nardiux ParadaAún no hay calificaciones
- Bitacoras de Temperaturas Refrigerador EME 2Documento2 páginasBitacoras de Temperaturas Refrigerador EME 2OCTAVIO JARDINEZAún no hay calificaciones
- Manual de Mantenimiento Preventtivo Y Correctivo Del Sistema de Iluminación Led - Comfenalco Sede La PlayaDocumento3 páginasManual de Mantenimiento Preventtivo Y Correctivo Del Sistema de Iluminación Led - Comfenalco Sede La PlayakarinpmpaezAún no hay calificaciones
- La Evolucion Del CaosDocumento5 páginasLa Evolucion Del CaosMonica50% (2)
- RemuneracionDocumento210 páginasRemuneracionRodrigo BorjaAún no hay calificaciones
- BarómetrosDocumento2 páginasBarómetrosnicol pomaAún no hay calificaciones
- Almendros Nestor - Dias de Una CamaraDocumento183 páginasAlmendros Nestor - Dias de Una CamaraDaniela MuñozAún no hay calificaciones
- Motor DSPICDocumento10 páginasMotor DSPICGustavo Choque CuevaAún no hay calificaciones
- TFG Caballero Moyano BeatrizDocumento74 páginasTFG Caballero Moyano BeatrizMuñoz Donoso VanneAún no hay calificaciones
- Cuaderno 7 - Sibila NúñezDocumento10 páginasCuaderno 7 - Sibila NúñezRaquel LeanizAún no hay calificaciones
- Las 5 Fuerzas de PorterDocumento8 páginasLas 5 Fuerzas de PorterMaria MaytaAún no hay calificaciones
- Estructuras de MaderaDocumento60 páginasEstructuras de MaderaScarlett De La Rosa100% (3)
- Tarea II - Tarea III - Hormonas y PersonalidadDocumento16 páginasTarea II - Tarea III - Hormonas y PersonalidadHenrry Antigua GonzalezAún no hay calificaciones
- Plantilla - Operaciones Logisticas GNVDocumento12 páginasPlantilla - Operaciones Logisticas GNVLeandro LopezAún no hay calificaciones
- GEOSINTÉTICOS EN CARRETERAS: Acercamiento General A Su Utilización y Planteamientospara Su Aplicación en Las Capas de Firme.Documento20 páginasGEOSINTÉTICOS EN CARRETERAS: Acercamiento General A Su Utilización y Planteamientospara Su Aplicación en Las Capas de Firme.antonio baamonde roca100% (2)
- Calificar BarajitasDocumento2 páginasCalificar BarajitasStefany OlvarellosAún no hay calificaciones
- M.P. Joaqd PDFDocumento99 páginasM.P. Joaqd PDFYecid Brayam Poma CallisayaAún no hay calificaciones
- Examen Simulacion Unam Area 4 57363 Downloable 943269Documento20 páginasExamen Simulacion Unam Area 4 57363 Downloable 943269Ciber Tron PXAún no hay calificaciones
- Sweet WardDocumento94 páginasSweet Wardcamila larrosa100% (1)
- Diagnostico Por La Lengua PDFDocumento6 páginasDiagnostico Por La Lengua PDFJesusAmbrosioAún no hay calificaciones
- Prueba Funciones LinealesDocumento2 páginasPrueba Funciones LinealesMarcelo SepulvedaAún no hay calificaciones
- Secuencia Didactica Tercero-La Diversidad de AnimalesDocumento19 páginasSecuencia Didactica Tercero-La Diversidad de AnimalesMagali Maldonado88% (17)
- Mademsa Ventti 460 B Plus DryerDocumento14 páginasMademsa Ventti 460 B Plus DryerSusanaGulppiPintoAún no hay calificaciones
- INTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de AlcoholDocumento52 páginasINTERVENCIÓN BREVE para El Consumo de Riesgo y Perjudicial de Alcoholpsic_molina-1Aún no hay calificaciones
- MM 0802020100Documento6 páginasMM 0802020100Luis Rafael CesarAún no hay calificaciones
- 004 Produccion CultivoDocumento52 páginas004 Produccion Cultivosebastian irarrazavalAún no hay calificaciones
- Columnas Con Empaque EstructuradoDocumento22 páginasColumnas Con Empaque EstructuradoDiana Patricia Nieto PomaAún no hay calificaciones