También podría gustarte
- Ecuaciones DiofanticasDocumento22 páginasEcuaciones DiofanticasEdinsson R. Javier VillanuevaAún no hay calificaciones
- Ejemplos de Microcomentarios de Jorge ManriqueDocumento5 páginasEjemplos de Microcomentarios de Jorge ManriquelareinadelasnievesAún no hay calificaciones
- Teoria de Conjuntos - RelacionesDocumento26 páginasTeoria de Conjuntos - RelacionesJavier MernesAún no hay calificaciones
- Semana 6 - Rectas en El EspacioDocumento16 páginasSemana 6 - Rectas en El EspacioRodrigo CMAún no hay calificaciones
- Ecuacion Vectorial de La Recta 3° MedioDocumento3 páginasEcuacion Vectorial de La Recta 3° MedioCamila Fernanda VejarAún no hay calificaciones
- Unidad 3 RelacionesDocumento41 páginasUnidad 3 RelacionesCesarAún no hay calificaciones
- PDF Solucionario de Schaumanalisis VectorialDocumento57 páginasPDF Solucionario de Schaumanalisis VectorialRAMON CASTILLOAún no hay calificaciones
- Teorema de Picard-Lindelöf - Wikipedia, La Enciclopedia LibreDocumento15 páginasTeorema de Picard-Lindelöf - Wikipedia, La Enciclopedia LibrePedro CouohAún no hay calificaciones
- 2-.Relaciones de Orden ReticulosDocumento19 páginas2-.Relaciones de Orden ReticulosmicaelakorecAún no hay calificaciones
- Trabajo de Relaciones y FuncionesDocumento13 páginasTrabajo de Relaciones y FuncionesANdii ScAún no hay calificaciones
- Notas de Clase Lógica 2020A PDFDocumento67 páginasNotas de Clase Lógica 2020A PDFJuan Diego Montenegro100% (1)
- CuestionarioDocumento8 páginasCuestionarioValentin RomeroAún no hay calificaciones
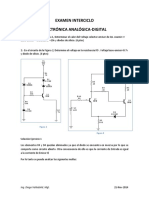
- Ejercicios Resueltos TransistoresDocumento4 páginasEjercicios Resueltos TransistoresMateo DomínguezAún no hay calificaciones
- La RectaDocumento17 páginasLa RectaAMYNNXXXXAún no hay calificaciones
- Problemario de Funciones de Varias VariablesDocumento102 páginasProblemario de Funciones de Varias Variablesenderson1592Aún no hay calificaciones
- Raíces Racionales de Una EcuaciónDocumento7 páginasRaíces Racionales de Una EcuaciónMaritza ReyesAún no hay calificaciones
- SMSM Areas CuadrangularesDocumento4 páginasSMSM Areas CuadrangularesManowar Jc100% (1)
- RECURRENCIASDocumento25 páginasRECURRENCIASAlejandro GarcésAún no hay calificaciones
- 6112-Teorema de Fuchs PDFDocumento9 páginas6112-Teorema de Fuchs PDFMiguel GámezAún no hay calificaciones
- Clase de GeometriaDocumento4 páginasClase de GeometriaNoelia ChimiAún no hay calificaciones
- Trabajo de ConicaDocumento10 páginasTrabajo de ConicaRuth MarínAún no hay calificaciones
- Sistema de numeración decimalDocumento9 páginasSistema de numeración decimalWALKER DANILO67% (3)
- Calculo de Volumenes de SolidosDocumento8 páginasCalculo de Volumenes de SolidosMaicol GonzaAún no hay calificaciones
- Cálculo II - Problemas de derivadas parciales y máximos-mínimosDocumento1 páginaCálculo II - Problemas de derivadas parciales y máximos-mínimosEfrain CalliAún no hay calificaciones
- Polinomios de LegendreDocumento4 páginasPolinomios de LegendreJesusGonzalezNucamendiAún no hay calificaciones
- UNIDAD 3 Rectas y Planos-17Documento15 páginasUNIDAD 3 Rectas y Planos-17sebastian ortegaAún no hay calificaciones
- NewtonDocumento11 páginasNewtonDianisKmachoAún no hay calificaciones
- Grafos PonderadosDocumento19 páginasGrafos PonderadosDavid Zamata TiconaAún no hay calificaciones
- Teorema de Stokes: Relación entre integrales de superficie y líneaDocumento3 páginasTeorema de Stokes: Relación entre integrales de superficie y líneaoldhts100% (1)
- Raz LógicoDocumento5 páginasRaz LógicoLuis Alejandro Chuquipoma MarínAún no hay calificaciones
- Inferencia Estadistica Ejercicios Resueltos Modelos de Examen UNA 2005 1 748 738Documento5 páginasInferencia Estadistica Ejercicios Resueltos Modelos de Examen UNA 2005 1 748 738Guillermo Delgado CastilloAún no hay calificaciones
- Optimizacion Clasica - Funcion Coerciva PDFDocumento29 páginasOptimizacion Clasica - Funcion Coerciva PDFJuancarlosAún no hay calificaciones
- CONJUNTOSprovDocumento11 páginasCONJUNTOSprovJORGE YAÑEZ BELLOTAAún no hay calificaciones
- 1 Topología en La Recta RealDocumento3 páginas1 Topología en La Recta RealJuan Cruz MartinezAún no hay calificaciones
- Sistema PMDocumento1 páginaSistema PMSesei MendezAún no hay calificaciones
- Notacion PolacaDocumento3 páginasNotacion Polacarosales11Aún no hay calificaciones
- Guía de Vectores FisicaDocumento8 páginasGuía de Vectores FisicaSamuel Morales0% (1)
- R.V - Semana 06 Eliminación de Oraciones (CepreUni 2019)Documento14 páginasR.V - Semana 06 Eliminación de Oraciones (CepreUni 2019)DJELI RamirezAún no hay calificaciones
- Logaritmos y exponenciales en nutriciónDocumento9 páginasLogaritmos y exponenciales en nutriciónHugo Gauna0% (1)
- Como Realizar Integrales en MatlabDocumento5 páginasComo Realizar Integrales en MatlabIsaac Yamith Guzman PaterninaAún no hay calificaciones
- Variedad LinealDocumento4 páginasVariedad LinealAmIn20122Aún no hay calificaciones
- Matrices BooleanasDocumento3 páginasMatrices BooleanasmorfesAún no hay calificaciones
- Técnica de ConteoDocumento4 páginasTécnica de ConteoNadia SalinasAún no hay calificaciones
- Logica MatematicaDocumento48 páginasLogica MatematicaAngel Cevallos0% (1)
- Funciones Hipergeometricas y Funciones de Bessel PDFDocumento32 páginasFunciones Hipergeometricas y Funciones de Bessel PDFThe RookieAún no hay calificaciones
- Campo Eléctrico Debido A Distribuciones de Carga ContinuaDocumento4 páginasCampo Eléctrico Debido A Distribuciones de Carga ContinuaOriana GAún no hay calificaciones
- Ejercicios Upn 2020Documento5 páginasEjercicios Upn 2020TOM CASTROAún no hay calificaciones
- Proyecto Métodos NuméricosDocumento12 páginasProyecto Métodos NuméricosalexAún no hay calificaciones
- 7.03 Diagonalización de MatricesDocumento3 páginas7.03 Diagonalización de MatricesBlog Algebra LinealAún no hay calificaciones
- Rectas: ecuaciones y conceptos básicosDocumento8 páginasRectas: ecuaciones y conceptos básicosEuse Vasquez JaramilloAún no hay calificaciones
- Lema de MorseDocumento15 páginasLema de Morsereckor94Aún no hay calificaciones
- SESIÓN 03 - Equivalencias LógicasDocumento5 páginasSESIÓN 03 - Equivalencias LógicasGiordano VasquezAún no hay calificaciones
- Mate Ecuaciones de La RectaDocumento8 páginasMate Ecuaciones de La Rectapaul enriquezAún no hay calificaciones
- Distancia de Un Punto A Una RectaDocumento8 páginasDistancia de Un Punto A Una RectaAudielAlavezHernandezAún no hay calificaciones
- La Recta en El Plano Jorge CastilloDocumento40 páginasLa Recta en El Plano Jorge Castillojose castilloAún no hay calificaciones
- BEATRIZ GTZ. Ecuación Vectorial de La Recta en El EspacioDocumento6 páginasBEATRIZ GTZ. Ecuación Vectorial de La Recta en El Espaciocbasicas082272Aún no hay calificaciones
- Rivas Paez Lorenzleon Larry U2Documento12 páginasRivas Paez Lorenzleon Larry U2LORENZO LEON LARRY RIVAS PAEZAún no hay calificaciones
- Ecuación Vectorial de La RectaDocumento6 páginasEcuación Vectorial de La RectaFERNANDO ANTONIO RINCON ABRILAún no hay calificaciones
- Resumen Geometría en El EspacioDocumento8 páginasResumen Geometría en El EspacioCristina QuintanaAún no hay calificaciones
- Aparatos de Medición y Cálculo de ErroresDocumento2 páginasAparatos de Medición y Cálculo de ErroresAdrian Cabezas SolaresAún no hay calificaciones
- El Producto Escalar de Dos VectoresDocumento3 páginasEl Producto Escalar de Dos VectoresAdrian Cabezas Solares100% (1)
- Trabajo y EnergiaDocumento4 páginasTrabajo y EnergiaAdrian Cabezas SolaresAún no hay calificaciones
- Ley de Charles y BoylesDocumento5 páginasLey de Charles y BoylesAdrian Cabezas SolaresAún no hay calificaciones
- Ley de Charles y BoylesDocumento5 páginasLey de Charles y BoylesAdrian Cabezas SolaresAún no hay calificaciones
- Ley de Charles y BoylesDocumento5 páginasLey de Charles y BoylesAdrian Cabezas SolaresAún no hay calificaciones
- ESTÁTICADocumento10 páginasESTÁTICAAdrian Cabezas SolaresAún no hay calificaciones
- El Territorio y La Gestión Del RiesgoDocumento4 páginasEl Territorio y La Gestión Del RiesgoRichard Miguel Hernandez Sabie Hernandez SabieAún no hay calificaciones
- Instalar Canaima 3Documento18 páginasInstalar Canaima 3Kevin Gabriel Cisnero AlvaradoAún no hay calificaciones
- Capitulo 109Documento22 páginasCapitulo 109lmolinaresAún no hay calificaciones
- Planeacion Estrategica 2022 - Sesión 3Documento31 páginasPlaneacion Estrategica 2022 - Sesión 3Anthony OlivaresAún no hay calificaciones
- Sesion de Apresndizaje de CT 3° AB 4 de OCTUBREDocumento6 páginasSesion de Apresndizaje de CT 3° AB 4 de OCTUBREYliceo Gonzales ÑaupariAún no hay calificaciones
- Informe Saponificación Del Aceite UsadoDocumento7 páginasInforme Saponificación Del Aceite Usado05-OB-HU-CARLA DANIELA VILCAS CARRIONAún no hay calificaciones
- Inmobiliaria y Construcciones Kaza EirlDocumento8 páginasInmobiliaria y Construcciones Kaza EirlElizabeth HuarotoAún no hay calificaciones
- Sistema Cad para Detectar y Clasificar Lesiones MamariasDocumento115 páginasSistema Cad para Detectar y Clasificar Lesiones MamariasMartha KatherineAún no hay calificaciones
- Modulo 3Documento19 páginasModulo 3Abner Abisai Bonilla LopezAún no hay calificaciones
- Cria de Cerdos Un Negocio Con FuturoDocumento15 páginasCria de Cerdos Un Negocio Con FuturoVERONICA ANDRADEAún no hay calificaciones
- 6 SESION La Globalización, Internet y Redes SocialesDocumento3 páginas6 SESION La Globalización, Internet y Redes SocialesTania Cerna NarcisoAún no hay calificaciones
- Causa Báez PDFDocumento167 páginasCausa Báez PDFSerá JusticiaAún no hay calificaciones
- Area de Influencia Directa e IndirectaDocumento5 páginasArea de Influencia Directa e IndirectaWwo PlznciaAún no hay calificaciones
- Normas de tránsito y seguridad vial: Curso de capacitaciónDocumento18 páginasNormas de tránsito y seguridad vial: Curso de capacitaciónandres gomez telloAún no hay calificaciones
- Rubrica para Evaluar Un Cuento EscritoDocumento3 páginasRubrica para Evaluar Un Cuento EscritoguadalupeAún no hay calificaciones
- Actividad 1 Definicion y Diferencias Entre Creatividad e InnovacionDocumento5 páginasActividad 1 Definicion y Diferencias Entre Creatividad e InnovacionSilvana Ceron RoseroAún no hay calificaciones
- Informe de Gestión Mgs. Joan CastroDocumento10 páginasInforme de Gestión Mgs. Joan CastroJoan CastroAún no hay calificaciones
- Desarrollo de Capacidades Fundamentales en Ciencias Naturales - MayoDocumento2 páginasDesarrollo de Capacidades Fundamentales en Ciencias Naturales - Mayojose pantaleoAún no hay calificaciones
- Guía de cableado estructuradoDocumento20 páginasGuía de cableado estructuradoBrayam Stiven Figueroa Ramirez100% (1)
- Manual Tecnico SISTEMA DE ASMINISTRACIÓN 2Documento26 páginasManual Tecnico SISTEMA DE ASMINISTRACIÓN 2Marco Antonio Martinez PacoAún no hay calificaciones
- Propuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...Documento76 páginasPropuesta de Protocolo Nacional de Monitoreo de Calidad Del Aire 04.12.2...CASTILLO LIÑAN TANIA LESLIEAún no hay calificaciones
- Macro Matriz de Recursos SST 2023Documento6 páginasMacro Matriz de Recursos SST 2023SARA LUCIA TANGARIFE PINEDAAún no hay calificaciones
- Formatos de Actividades de Aprendizajes MINEDUDocumento3 páginasFormatos de Actividades de Aprendizajes MINEDUESTEPHANY CRISTHEL NEGRON CHACONAún no hay calificaciones
- Evaluación U2 PDFDocumento4 páginasEvaluación U2 PDFAyónPlayAún no hay calificaciones
- Sistema nervioso y neuronasDocumento34 páginasSistema nervioso y neuronasliliAún no hay calificaciones
- Balsas LipidicasDocumento5 páginasBalsas LipidicasJuan Jesus Barrios CapuchinoAún no hay calificaciones
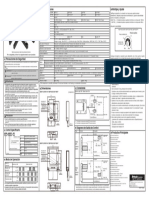
- Autonics Bup Esp ManualDocumento1 páginaAutonics Bup Esp ManualfchumpitazAún no hay calificaciones
- La Estructura Fiscal en México.: Actividad IntegradoraDocumento11 páginasLa Estructura Fiscal en México.: Actividad IntegradoraChanito EscandonAún no hay calificaciones
- Práctica 8. Eficiencia de Una Torre de DestilaciónDocumento12 páginasPráctica 8. Eficiencia de Una Torre de DestilaciónKarloz GuarnizoAún no hay calificaciones
- Reforma fiscal ambiciosa requerida para cumplir compromisos del PactoDocumento2 páginasReforma fiscal ambiciosa requerida para cumplir compromisos del Pactodanndimoont100% (1)