También podría gustarte
- Fundamentos teórico-prácticos de electroestimulación en la lesión medularDe EverandFundamentos teórico-prácticos de electroestimulación en la lesión medularCalificación: 5 de 5 estrellas5/5 (1)
- FIM Descripcion ProtocoloDocumento10 páginasFIM Descripcion ProtocoloManuel Ignacio Peña UrzuaAún no hay calificaciones
- Electrocardiografía en medicina prehospitalariaDe EverandElectrocardiografía en medicina prehospitalariaAún no hay calificaciones
- Carolina2012,+Journal+Manager,+6 IMPACTO+FUNCIONAL Vol.+22+No.+1Documento9 páginasCarolina2012,+Journal+Manager,+6 IMPACTO+FUNCIONAL Vol.+22+No.+1Gestion Guardia PlottierAún no hay calificaciones
- Programa de Rehabilitación IntensivaDocumento15 páginasPrograma de Rehabilitación IntensivaHelen ÁlvarezAún no hay calificaciones
- La Intervencion de Rehabilitacion A Largo Plazo en Tres Etapas AliviaDocumento8 páginasLa Intervencion de Rehabilitacion A Largo Plazo en Tres Etapas AliviaLilian Paola SMAún no hay calificaciones
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- BENEFICIOS DE FES. NUEVAS TERAPIAS 10.1016@j.rh.2013.10.001Documento9 páginasBENEFICIOS DE FES. NUEVAS TERAPIAS 10.1016@j.rh.2013.10.001BelenAún no hay calificaciones
- Somnolencia diurna excesiva e insomnio: males de los tiempos actualesDe EverandSomnolencia diurna excesiva e insomnio: males de los tiempos actualesCalificación: 3 de 5 estrellas3/5 (1)
- Tarea 4.1 Intervenciones CriticasDocumento5 páginasTarea 4.1 Intervenciones CriticasAngiemar Cruz CastellanoAún no hay calificaciones
- Orientación y manejo del estado epiléptico en niñosDe EverandOrientación y manejo del estado epiléptico en niñosAún no hay calificaciones
- Evolucion y Pronostico en Pacientes Con HEMIPLEJIADocumento6 páginasEvolucion y Pronostico en Pacientes Con HEMIPLEJIAesmith davidAún no hay calificaciones
- 1 s2.0 S004871201730097X MainDocumento10 páginas1 s2.0 S004871201730097X MainValee SaavedraaAún no hay calificaciones
- Reaprendizaje Motor Revision NarrativaDocumento14 páginasReaprendizaje Motor Revision NarrativaJuliaChimentoG.100% (1)
- Dialnet AplicacionDelMetodoBobathEnPacientesQueHanSufridoU 5308784Documento18 páginasDialnet AplicacionDelMetodoBobathEnPacientesQueHanSufridoU 5308784Henry TPAún no hay calificaciones
- Reaprendizaje Motor Orientado A Tareas en Pacientes Con Secuelas de Enfermedad Cerebro Vascular: Una Revisión NarrativaDocumento15 páginasReaprendizaje Motor Orientado A Tareas en Pacientes Con Secuelas de Enfermedad Cerebro Vascular: Una Revisión NarrativaÁngela Tatiana Briceño ÁriasAún no hay calificaciones
- Evaluación NeuromotoraDocumento7 páginasEvaluación NeuromotoraDanielaßvAún no hay calificaciones
- Reaprendizaje Motor Orientado A Tareas en Pacientes Con Secuelas de Enfermedad Cerebro Vascular: Una Revisión NarrativaDocumento15 páginasReaprendizaje Motor Orientado A Tareas en Pacientes Con Secuelas de Enfermedad Cerebro Vascular: Una Revisión NarrativaMedicina Fisica y RehabilitaciónAún no hay calificaciones
- 03.crisis Epilept 2019Documento6 páginas03.crisis Epilept 2019Jason Jhoadfer GonzálezAún no hay calificaciones
- TFM Rebeca Perez Martin (Fisioterapia Con Equino) PDFDocumento55 páginasTFM Rebeca Perez Martin (Fisioterapia Con Equino) PDFAnaKarina Maraboli QuinterosAún no hay calificaciones
- 2 El Accidente Cerebrovascular Desde La Mirada Del RehabilitadorDocumento9 páginas2 El Accidente Cerebrovascular Desde La Mirada Del RehabilitadorRichter BelmontAún no hay calificaciones
- CMQ 201 HDocumento22 páginasCMQ 201 Helis jhoana guerrero carrilloAún no hay calificaciones
- Funcion Motora en Pacientes Con AcvDocumento9 páginasFuncion Motora en Pacientes Con AcvKarol Zapata SuarezAún no hay calificaciones
- 1ra20investigación FormativaDocumento5 páginas1ra20investigación FormativaJoseline EblaAún no hay calificaciones
- Dialnet RehabilitacionDelACVEvaluacionPronosticoYTratamien 4208262 PDFDocumento16 páginasDialnet RehabilitacionDelACVEvaluacionPronosticoYTratamien 4208262 PDFzapiumAún no hay calificaciones
- Dialnet RehabilitacionDelACVEvaluacionPronosticoYTratamien 4208262Documento16 páginasDialnet RehabilitacionDelACVEvaluacionPronosticoYTratamien 4208262maurolornaAún no hay calificaciones
- RS RoboticaDocumento8 páginasRS Roboticaoscar eduardo mateus ariasAún no hay calificaciones
- 2015 Terapia Robótica para La Rehabilitación de La Marcha en Patología NeurológicaDocumento16 páginas2015 Terapia Robótica para La Rehabilitación de La Marcha en Patología NeurológicaJorge Leonardo Silva RiffoAún no hay calificaciones
- Metodo de BobathDocumento15 páginasMetodo de BobathIvan C. Velasco0% (1)
- Rehabilitación Neurológica DR Ricardo CázaresDocumento23 páginasRehabilitación Neurológica DR Ricardo CázaresRicardo Cazares MejiaAún no hay calificaciones
- Acv y Fisotrapia AcuaticaDocumento8 páginasAcv y Fisotrapia AcuaticaVorka Roxana Ortiz PeñaAún no hay calificaciones
- Abordaje Orientado A La TareaDocumento26 páginasAbordaje Orientado A La TareaSusan PeñaAún no hay calificaciones
- Caso EVCDocumento4 páginasCaso EVCDenise ArroyoAún no hay calificaciones
- Functionality of The Gait in The Quality of Life Related To Health in Adults With Stroke: Systematic Review - MetaanalysisDocumento13 páginasFunctionality of The Gait in The Quality of Life Related To Health in Adults With Stroke: Systematic Review - MetaanalysisPaola GuerraAún no hay calificaciones
- Fisioterapia en UciDocumento17 páginasFisioterapia en UciJOSE NOVELOAún no hay calificaciones
- en EsDocumento10 páginasen EsLara Perez MurciaAún no hay calificaciones
- Rehabilitación Post ACVDocumento20 páginasRehabilitación Post ACVKenia Oyola Angeles100% (1)
- Evaluación Estado de La ConcienciaDocumento11 páginasEvaluación Estado de La Concienciajgrplan8207Aún no hay calificaciones
- 1373 5703 1 PB PDFDocumento8 páginas1373 5703 1 PB PDFAndres DurangoAún no hay calificaciones
- La Técnica Perfetti Como Estrategia Neurorestaurativa para Mejorar El Balance y La Marcha en PacientDocumento8 páginasLa Técnica Perfetti Como Estrategia Neurorestaurativa para Mejorar El Balance y La Marcha en PacientRouss MeryAún no hay calificaciones
- Evaluación en Los Centros de Reconocimiento de Conductores de Los Pacientes Con Patología Neurológica y NeuromuscularDocumento6 páginasEvaluación en Los Centros de Reconocimiento de Conductores de Los Pacientes Con Patología Neurológica y Neuromuscularosbaldo1632Aún no hay calificaciones
- Programa Enfermero de Control Metabólico Y Calidad de Vida en Población Ambulatoria Con Tratamiento AntipsicóticoDocumento11 páginasPrograma Enfermero de Control Metabólico Y Calidad de Vida en Población Ambulatoria Con Tratamiento AntipsicóticoYuliana Andrea Paz UrreaAún no hay calificaciones
- Investigacion Sobre Vojta y EvcDocumento12 páginasInvestigacion Sobre Vojta y Evcanon_46957660Aún no hay calificaciones
- Traducción de Articulos TAUBDocumento89 páginasTraducción de Articulos TAUBKarlaMondragónAún no hay calificaciones
- Escalas Neurológicas EVCDocumento7 páginasEscalas Neurológicas EVCOswaldo AmayaAún no hay calificaciones
- 1 s2.0 S0213485312001879 MainDocumento7 páginas1 s2.0 S0213485312001879 MainKarla EstradaAún no hay calificaciones
- Neuro Fisiologia PDFDocumento8 páginasNeuro Fisiologia PDFCarlos Portal HiguerasAún no hay calificaciones
- Presentacion IctusDocumento30 páginasPresentacion IctusGuaci 153Aún no hay calificaciones
- Rehabilitacion Tarea No2Documento7 páginasRehabilitacion Tarea No2Cindy Angeles Ramos100% (1)
- Tapping en Hemiplejico EspañolDocumento7 páginasTapping en Hemiplejico EspañolJavier UchaAún no hay calificaciones
- ACV (Paper)Documento8 páginasACV (Paper)Daniela Muñoz100% (2)
- Grado en Fisioterapia: Trabajo de Fin de GradoDocumento50 páginasGrado en Fisioterapia: Trabajo de Fin de GradoAnonymous DHusAM94iAún no hay calificaciones
- Testt Control de TroncoDocumento7 páginasTestt Control de TroncoDavid Espinoza SobarzoAún no hay calificaciones
- Estandarización Del Test de Reacción Cognitiva.Documento10 páginasEstandarización Del Test de Reacción Cognitiva.AnaaaerobiosAún no hay calificaciones
- Guia Clinica TCEDocumento7 páginasGuia Clinica TCEyohnniergAún no hay calificaciones
- Instrumentos de Medida Más Frecuentemente Empleados en El TCEDocumento7 páginasInstrumentos de Medida Más Frecuentemente Empleados en El TCEMario Alberto Tellez RamosAún no hay calificaciones
- Capitulo de Muestra - Rehabilitacion de Las Enfermedades Neuromusculares en La InfanciaDocumento12 páginasCapitulo de Muestra - Rehabilitacion de Las Enfermedades Neuromusculares en La InfanciaAlvaroMaidanaAún no hay calificaciones
- Rehabilitacion Post Accidente CerebrovascularDocumento8 páginasRehabilitacion Post Accidente CerebrovascularTabatha Ebed-mahfouz TapiaAún no hay calificaciones
- MA Investigacion Operaciones AprobadoDocumento24 páginasMA Investigacion Operaciones AprobadoRobinson XMI100% (1)
- Conv Potencia PSCAD Resumen RGDocumento107 páginasConv Potencia PSCAD Resumen RGRobinson XMIAún no hay calificaciones
- BmartindelbriosistemasmicroprocesadoresymicrocontroladoresDocumento414 páginasBmartindelbriosistemasmicroprocesadoresymicrocontroladoresRobinson XMIAún no hay calificaciones
- Biologia Molecular de PlantasDocumento8 páginasBiologia Molecular de PlantasRobinson XMIAún no hay calificaciones
- Boletin 10. Inversiones Alternativas HigueraJhonathanDocumento8 páginasBoletin 10. Inversiones Alternativas HigueraJhonathanRobinson XMIAún no hay calificaciones
- Eth Guide Es PDFDocumento14 páginasEth Guide Es PDFRobinson XMIAún no hay calificaciones
- Proyecto III - CompletoDocumento34 páginasProyecto III - CompletoIvanovich BriceñoAún no hay calificaciones
- Guia Rapida Canon EOS 100DDocumento2 páginasGuia Rapida Canon EOS 100DAgapito79Aún no hay calificaciones
- BeneHeart R12 Operator's Manual V3.0 SPDocumento104 páginasBeneHeart R12 Operator's Manual V3.0 SPdicova43100% (2)
- Copia de Conciliacion de Impuestos DiciembreDocumento37 páginasCopia de Conciliacion de Impuestos DiciembreJeffcelis PerdomoAún no hay calificaciones
- Estructura en C++Documento15 páginasEstructura en C++William Marin AlvaradoAún no hay calificaciones
- Manual de Ayuda Rendicion de Cuentas v1Documento30 páginasManual de Ayuda Rendicion de Cuentas v1Pablo Cesar Medina BarretoAún no hay calificaciones
- Pregunta 2Documento7 páginasPregunta 2Kevin Andrés AmayaAún no hay calificaciones
- Manual CAN Test Box TA069Documento12 páginasManual CAN Test Box TA069GermainCampillayAún no hay calificaciones
- Racket 2Documento245 páginasRacket 2Fdo Mora GarciaAún no hay calificaciones
- Cierres AtípicosDocumento1 páginaCierres AtípicosMedina Ramirez DimasAún no hay calificaciones
- La Percepción Del Color en La Visión HumanaDocumento3 páginasLa Percepción Del Color en La Visión HumanaRubén López BarreroAún no hay calificaciones
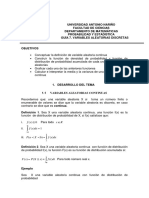
- Guia 07. Variables Aleatorias ContinuasDocumento5 páginasGuia 07. Variables Aleatorias ContinuasJANNER ALBERTO RADA VILLANUEVAAún no hay calificaciones
- Especificaciones TecnicasDocumento7 páginasEspecificaciones TecnicasVictor Valdebenito CartesAún no hay calificaciones
- Sesión 04 SEL Por Cramer y LUDocumento17 páginasSesión 04 SEL Por Cramer y LUAUGUSTO VALERIO PUSARI CORREAAún no hay calificaciones
- Benazir Francis Herrera Yucra PDFDocumento210 páginasBenazir Francis Herrera Yucra PDFGrecia RodríguezAún no hay calificaciones
- RJ-45 y RJ-11Documento5 páginasRJ-45 y RJ-11ponchoandradeeAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - FUNDAMENTOS DE DISE O - (GRUPO1) 2Documento11 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - FUNDAMENTOS DE DISE O - (GRUPO1) 2sulmapulidoAún no hay calificaciones
- Pro Forma de Servicios AvaluosDocumento4 páginasPro Forma de Servicios Avaluosmarco godoy100% (1)
- Competencias DigitalesDocumento12 páginasCompetencias DigitalesDani Elitha ArizaAún no hay calificaciones
- Curso A Distancia Camión 793F Parte 2: Entrenamiento de Servicio NPI Camiones de Obra 793FDocumento57 páginasCurso A Distancia Camión 793F Parte 2: Entrenamiento de Servicio NPI Camiones de Obra 793FJavier Pagan TorresAún no hay calificaciones
- Parcial 1Documento11 páginasParcial 1Javier Garzon100% (3)
- Tesis de Licenciatura PDFDocumento129 páginasTesis de Licenciatura PDFnicorivaneraAún no hay calificaciones
- Brochure 2017 - MineríaDocumento21 páginasBrochure 2017 - MineríaAnonymous TsKN7XZBAún no hay calificaciones
- Conociendo Tu ComputadorDocumento61 páginasConociendo Tu ComputadorLester1972Aún no hay calificaciones
- Copia de Mapa Conceptual Supply Chain ManagementDocumento1 páginaCopia de Mapa Conceptual Supply Chain ManagementLuis Cabana CeraAún no hay calificaciones
- Guia Ion Enterprise Español 6.0Documento344 páginasGuia Ion Enterprise Español 6.0hmc41277100% (2)
- SILABOCompiladores2020 ADocumento5 páginasSILABOCompiladores2020 ADE LOS SANTOS TERRONES GABRIEL JOAOAún no hay calificaciones
- Guía Taller 4 - Datos Met - Grupo 24 - Unimag - Santa Marta - 2022 - IDocumento22 páginasGuía Taller 4 - Datos Met - Grupo 24 - Unimag - Santa Marta - 2022 - IyoiAún no hay calificaciones
- O-C-Sst-F Formato Encuesta Riesgos LaboralesDocumento3 páginasO-C-Sst-F Formato Encuesta Riesgos LaboralesDIANA PINZON HERNANDEZAún no hay calificaciones
- Tus Zonas Erroneas: Guía Para Combatir las Causas de la InfelicidadDe EverandTus Zonas Erroneas: Guía Para Combatir las Causas de la InfelicidadCalificación: 4.5 de 5 estrellas4.5/5 (1833)
- ¡Tómate un respiro! Mindfulness: El arte de mantener la calma en medio de la tempestadDe Everand¡Tómate un respiro! Mindfulness: El arte de mantener la calma en medio de la tempestadCalificación: 5 de 5 estrellas5/5 (199)
- Más vida con hábitos saludablesDe EverandMás vida con hábitos saludablesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- El Monje Que Vendio Su Ferrari: Una Fábula EspiritualDe EverandEl Monje Que Vendio Su Ferrari: Una Fábula EspiritualCalificación: 4.5 de 5 estrellas4.5/5 (1700)
- Los Secretos De La Mente Millonaria: Domina el juego de la riquezaDe EverandLos Secretos De La Mente Millonaria: Domina el juego de la riquezaCalificación: 5 de 5 estrellas5/5 (457)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Signos y símbolos: Desvelando el significado espiritual de los sellos angélicos, tótems y otros símbolos mágicos, sagrados y religiososDe EverandSignos y símbolos: Desvelando el significado espiritual de los sellos angélicos, tótems y otros símbolos mágicos, sagrados y religiososCalificación: 5 de 5 estrellas5/5 (1)
- Las 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónDe EverandLas 6 necesidades de cada niño: Empoderar a padres e hijos a través de la ciencia de la conexiónCalificación: 4.5 de 5 estrellas4.5/5 (6)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Resetea tu mente. Descubre de lo que eres capazDe EverandResetea tu mente. Descubre de lo que eres capazCalificación: 5 de 5 estrellas5/5 (196)
- El juego de la vida y cómo jugarloDe EverandEl juego de la vida y cómo jugarloCalificación: 5 de 5 estrellas5/5 (4)
- Mujeres de luz: Guía para descubrir el poder de tu alma y su propósitoDe EverandMujeres de luz: Guía para descubrir el poder de tu alma y su propósitoCalificación: 4.5 de 5 estrellas4.5/5 (39)
- Escribe el guion de la vida que quieres: Manifiesta tus sueños con tan solo lápiz y papelDe EverandEscribe el guion de la vida que quieres: Manifiesta tus sueños con tan solo lápiz y papelCalificación: 5 de 5 estrellas5/5 (1)
- La conquista del temploDe EverandLa conquista del temploCalificación: 4.5 de 5 estrellas4.5/5 (28)
- ¡Basta ya de ser un Tipo Lindo! (No More Mr. Nice Guy): Un Plan Probado para Que Obtengas Lo Que Quieras en La Vida El Sexo y El Amor (A Proven Plan for Getting What You Want in Love, Sex and Life)De Everand¡Basta ya de ser un Tipo Lindo! (No More Mr. Nice Guy): Un Plan Probado para Que Obtengas Lo Que Quieras en La Vida El Sexo y El Amor (A Proven Plan for Getting What You Want in Love, Sex and Life)Calificación: 5 de 5 estrellas5/5 (47)
- Demonología: Guía de Todo lo que Querías Saber Acerca de los Demonios y Entidades MalignasDe EverandDemonología: Guía de Todo lo que Querías Saber Acerca de los Demonios y Entidades MalignasCalificación: 4 de 5 estrellas4/5 (14)
- Fuerza de voluntad: Cómo practicar y dominar el autocontrolDe EverandFuerza de voluntad: Cómo practicar y dominar el autocontrolCalificación: 4.5 de 5 estrellas4.5/5 (91)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- En sintonía con tu ciclo femenino: FLO. Aprende a sincronizarte con tu bioquímica para dar rienda suelta a tu creatividad, mejorar tu vida y hacer más con menos estrésDe EverandEn sintonía con tu ciclo femenino: FLO. Aprende a sincronizarte con tu bioquímica para dar rienda suelta a tu creatividad, mejorar tu vida y hacer más con menos estrésCalificación: 4.5 de 5 estrellas4.5/5 (11)
- CAMBIA TU CEREBRO CAMBIA TU VIDA: CAMBIA TU CEREBRO CAMBIA TU VIDADe EverandCAMBIA TU CEREBRO CAMBIA TU VIDA: CAMBIA TU CEREBRO CAMBIA TU VIDACalificación: 3.5 de 5 estrellas3.5/5 (38)
- Cómo Conversar Con Cualquier Persona: Mejora tus habilidades sociales, desarrolla tu carisma, domina las conversaciones triviales y conviértete en una persona sociable para hacer verdaderos amigos y construir relaciones significativas.De EverandCómo Conversar Con Cualquier Persona: Mejora tus habilidades sociales, desarrolla tu carisma, domina las conversaciones triviales y conviértete en una persona sociable para hacer verdaderos amigos y construir relaciones significativas.Calificación: 5 de 5 estrellas5/5 (54)
- Tarot de Marsella: Leer las cartas como el DiabloDe EverandTarot de Marsella: Leer las cartas como el DiabloCalificación: 5 de 5 estrellas5/5 (2)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- La vida del seductor sinvergüenza y encantador.De EverandLa vida del seductor sinvergüenza y encantador.Calificación: 5 de 5 estrellas5/5 (2)
- Ayurveda: Descubriendo los Secretos de la Curación Hindú a Través de la Dieta del Ayurveda, el Yoga, la Aromaterapia y la MeditaciónDe EverandAyurveda: Descubriendo los Secretos de la Curación Hindú a Través de la Dieta del Ayurveda, el Yoga, la Aromaterapia y la MeditaciónCalificación: 4 de 5 estrellas4/5 (7)
- Cambia tu cerebro cambia tu cuerpoDe EverandCambia tu cerebro cambia tu cuerpoCalificación: 3.5 de 5 estrellas3.5/5 (38)