También podría gustarte
- Analisis Modal de Las EstructurasDocumento15 páginasAnalisis Modal de Las EstructurasEdison Ricardo Cedeño Ripalda100% (1)
- Proyecto Final de Geotecnia - Diseño de PilotesDocumento66 páginasProyecto Final de Geotecnia - Diseño de PiloteselvinquinteroAún no hay calificaciones
- MetodoareamomentoDocumento27 páginasMetodoareamomentoAnonymous touuaJUb5NAún no hay calificaciones
- TP Nº4 EjerciciosDocumento17 páginasTP Nº4 EjerciciosBuy Sell FormosaAún no hay calificaciones
- Nociones PreliminaresDocumento7 páginasNociones Preliminaresremy smith yarleque corderoAún no hay calificaciones
- Análisis de Una Viga en VoladizoDocumento3 páginasAnálisis de Una Viga en VoladizoMarilyn CoroAún no hay calificaciones
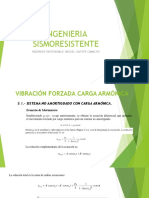
- Vibración ForzadaDocumento65 páginasVibración ForzadaYahirSantaCruzNúñezAún no hay calificaciones
- Analisis de Esfuerzos en Una Presa de Gravedad PDFDocumento32 páginasAnalisis de Esfuerzos en Una Presa de Gravedad PDFVictor Manuel Chacana ColihuincaAún no hay calificaciones
- 2 Flujo en Canales Abiertos LRMN 2018Documento61 páginas2 Flujo en Canales Abiertos LRMN 2018JULIO TORRESAún no hay calificaciones
- Diseño de Cartel Teniendo Una Deformación Máxima de Los Cables Que Lo SostienenDocumento8 páginasDiseño de Cartel Teniendo Una Deformación Máxima de Los Cables Que Lo SostienenPaolaAún no hay calificaciones
- Apunte Teórico - Parte 1Documento24 páginasApunte Teórico - Parte 1alexisAún no hay calificaciones
- Artículo Científico Columnas EsbeltasDocumento13 páginasArtículo Científico Columnas EsbeltasAndres AlmeidaAún no hay calificaciones
- RESUMEN GUÍA T.P. - T.P.Nº 6 - Cilindros y Pilares de FundaciónDocumento6 páginasRESUMEN GUÍA T.P. - T.P.Nº 6 - Cilindros y Pilares de FundaciónnachocmzaAún no hay calificaciones
- Análisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoDocumento33 páginasAnálisis de Vivienda Unifamiliar Aplicando El Teorema de CastiglianoGiancarlo René Bendezú MartínezAún no hay calificaciones
- Clase Diseño Muro Armado PDFDocumento23 páginasClase Diseño Muro Armado PDFGabriel Bautista GutierrezAún no hay calificaciones
- 13 Energía EspecificaDocumento47 páginas13 Energía EspecificaIsaacEspinozaAún no hay calificaciones
- Mapa Conceptual - Densidad de CorrienteDocumento2 páginasMapa Conceptual - Densidad de CorrienteKetsia DarlinAún no hay calificaciones
- Resumen Ley de FickDocumento3 páginasResumen Ley de FickJaimes LauraAún no hay calificaciones
- Informe Vibracion de Sisteas de 1 GDLDocumento10 páginasInforme Vibracion de Sisteas de 1 GDLfrank fsbAún no hay calificaciones
- Clase 01 de Ingeniería de Cimentaciones - Concreto Armado IIDocumento61 páginasClase 01 de Ingeniería de Cimentaciones - Concreto Armado IIFavio FloresAún no hay calificaciones
- Metodo de Doble IntegracionDocumento7 páginasMetodo de Doble IntegracionsoloabcAún no hay calificaciones
- 6-Método de RitzDocumento22 páginas6-Método de RitzGean Pierre Torres QuevedoAún no hay calificaciones
- Unidad 1. Armaduras Estaticamente DeterminadasDocumento31 páginasUnidad 1. Armaduras Estaticamente DeterminadasmariaAún no hay calificaciones
- Ecuacion de Los Tres Momentos PDFDocumento11 páginasEcuacion de Los Tres Momentos PDFRosales Lopez WillmarAún no hay calificaciones
- Metodo de Cross para Marcos Sin Desplazamiento LateralDocumento4 páginasMetodo de Cross para Marcos Sin Desplazamiento Lateralmarcelo aza nuñezAún no hay calificaciones
- Maqueta Ensayo A TraccionDocumento14 páginasMaqueta Ensayo A TraccionGustavo HinojosaAún no hay calificaciones
- FísicaDocumento6 páginasFísicaJosue David Muñoz SabinoAún no hay calificaciones
- Napa FreaticaDocumento3 páginasNapa FreaticaWilbert Alexis Gutierrez TerronesAún no hay calificaciones
- Algebra Lineal - MatricesDocumento14 páginasAlgebra Lineal - MatricesDiego Palomino0% (2)
- Trabajo de Concreto PretensadoDocumento23 páginasTrabajo de Concreto PretensadoAugusto Tuto MarcanoAún no hay calificaciones
- Trabajo Encargado Final Final 1Documento77 páginasTrabajo Encargado Final Final 1Yardy Guzman OsccoAún no hay calificaciones
- Analisis Estructural Metodo de CrossDocumento20 páginasAnalisis Estructural Metodo de CrossESTRELLA.ESAún no hay calificaciones
- Trabajo de Diseño de Acero y MaderaDocumento18 páginasTrabajo de Diseño de Acero y MaderaTracey CoffeyAún no hay calificaciones
- Proyecfto Estructura 2Documento6 páginasProyecfto Estructura 2Anonymous QHoIydAún no hay calificaciones
- Estrucuturas de Cocreto:torsiónDocumento11 páginasEstrucuturas de Cocreto:torsiónJosue RodriguezAún no hay calificaciones
- Estabilización Del MovimientoDocumento26 páginasEstabilización Del Movimientocesar_qAún no hay calificaciones
- Estructuras - PlasticidadDocumento27 páginasEstructuras - Plasticidadjolrael2kAún no hay calificaciones
- Analisis DinamicoDocumento10 páginasAnalisis DinamicoWalter Eduardo Loayza ChambillaAún no hay calificaciones
- Vigas Doblemente Reforzadas-GRUPO 2Documento11 páginasVigas Doblemente Reforzadas-GRUPO 2Malú Chaquila SaavedraAún no hay calificaciones
- TEMA 03 - El OleajeDocumento8 páginasTEMA 03 - El OleajeEduardo Garcia100% (1)
- Presas A Gravedad Cimentadas en Suelo 6 NoviembreDocumento17 páginasPresas A Gravedad Cimentadas en Suelo 6 NoviembreArce GuamánAún no hay calificaciones
- VINCULOSDocumento40 páginasVINCULOSMark TateAún no hay calificaciones
- Unidad 3 - Movimiento de Masas PDFDocumento31 páginasUnidad 3 - Movimiento de Masas PDFKael CabezasAún no hay calificaciones
- Diseño de Losas y ColumnasDocumento27 páginasDiseño de Losas y ColumnasJhonatam Jose Rivas SarmientoAún no hay calificaciones
- AnclajesDocumento8 páginasAnclajesHugo ToledoAún no hay calificaciones
- Empuje de TierrasDocumento11 páginasEmpuje de Tierrasjairo rivas rosalesAún no hay calificaciones
- Poster Tps Mecanica de Fluidos 2Documento1 páginaPoster Tps Mecanica de Fluidos 2Nuñez Allpocc Juan HenryAún no hay calificaciones
- Plasticidad TeoriaDocumento27 páginasPlasticidad TeoriaHerminia Yesica CALISAYA APAZAAún no hay calificaciones
- Trabajo PartidoresDocumento41 páginasTrabajo PartidoreszapanacivilAún no hay calificaciones
- Redes de FlujoDocumento50 páginasRedes de FlujoCristhian Cortes100% (1)
- Viga TDocumento19 páginasViga TWilther Antonio Avendaño RoblesAún no hay calificaciones
- Diseño de Losa en Una DireccionDocumento11 páginasDiseño de Losa en Una DireccionMario RamosAún no hay calificaciones
- Diseño de Un Puente de Hormigon PreesforzadoDocumento34 páginasDiseño de Un Puente de Hormigon PreesforzadoRoberto TórrezAún no hay calificaciones
- ESTRUCTURA DE TABIQUES DescripcionDocumento12 páginasESTRUCTURA DE TABIQUES DescripcionVanina VillarruelAún no hay calificaciones
- Lineas de Influencias en Una ArmaduraDocumento27 páginasLineas de Influencias en Una ArmaduraJaimeArpasiAún no hay calificaciones
- Movimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Documento32 páginasMovimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Piero Arcos CerronAún no hay calificaciones
- Evaluación de Capacidad de Carga de Un Pilote de Pequeño DDocumento11 páginasEvaluación de Capacidad de Carga de Un Pilote de Pequeño DMarco BoidiAún no hay calificaciones
- Sistemas de 1 Grado de LibertadDocumento18 páginasSistemas de 1 Grado de LibertadJEFFERSON0419Aún no hay calificaciones
- Análisis Los Sistemas y Grados de Libertad y Ecuación de Equilibrio DinámicoDocumento31 páginasAnálisis Los Sistemas y Grados de Libertad y Ecuación de Equilibrio DinámicoErik David Medina100% (1)
- Ejercicios de Ecuaciones Diferenciales OrdinariasDe EverandEjercicios de Ecuaciones Diferenciales OrdinariasCalificación: 4 de 5 estrellas4/5 (1)
- Actividad 3Documento3 páginasActividad 3carlosAún no hay calificaciones
- CuestionarioDocumento2 páginasCuestionariocarlosAún no hay calificaciones
- TAREADocumento2 páginasTAREAcarlos100% (1)
- Primera Clase de Gestión AmbientalDocumento2 páginasPrimera Clase de Gestión AmbientalcarlosAún no hay calificaciones
- Monografia Del GilDocumento43 páginasMonografia Del GilcarlosAún no hay calificaciones
- Carlos Villalobos VidalonDocumento3 páginasCarlos Villalobos VidaloncarlosAún no hay calificaciones
- Carlos Villalobos VidalonDocumento27 páginasCarlos Villalobos VidaloncarlosAún no hay calificaciones
- ExpocicionDocumento4 páginasExpocicioncarlosAún no hay calificaciones
- Teoria de Skempton Capacidad de CargaDocumento12 páginasTeoria de Skempton Capacidad de CargacarlosAún no hay calificaciones
- Asentamiento de CapasDocumento16 páginasAsentamiento de CapascarlosAún no hay calificaciones
- Cimentaciones Profundas - Suelos IDocumento26 páginasCimentaciones Profundas - Suelos IcarlosAún no hay calificaciones
- InformeDocumento8 páginasInformecarlosAún no hay calificaciones
- Definicion y Clasificacion de Los Recurso HidricosDocumento10 páginasDefinicion y Clasificacion de Los Recurso HidricoscarlosAún no hay calificaciones
- Informe Mecanica de SuelosDocumento34 páginasInforme Mecanica de SueloscarlosAún no hay calificaciones
- Elaboracion Planes Municipales Girs 2008Documento154 páginasElaboracion Planes Municipales Girs 2008angel1986aAún no hay calificaciones
- La Descentralizacion en El PeruDocumento58 páginasLa Descentralizacion en El PeruHugos Vasquez100% (1)
- Imperio Kitsch 30 de Agosto 2020Documento183 páginasImperio Kitsch 30 de Agosto 2020Eva Ponsati Cohen100% (1)
- 01 The Caso Walt Disney CompanyDocumento4 páginas01 The Caso Walt Disney CompanySergio UgarteAún no hay calificaciones
- Comando en Accion (Edición 51 Enero-Julio 2012), Órgano Oficial Del Comando Conjunto de Las FFAA Del PerúDocumento41 páginasComando en Accion (Edición 51 Enero-Julio 2012), Órgano Oficial Del Comando Conjunto de Las FFAA Del PerúBlog Catarsis y Harakiri100% (1)
- Potosí MineríaDocumento14 páginasPotosí MineríahriosmonteroAún no hay calificaciones
- Campo de AceleracionDocumento4 páginasCampo de AceleracionFelipe Quiñones Paucar100% (1)
- BOK - CSSGB - Six Sigma Green Belt CertificadoDocumento10 páginasBOK - CSSGB - Six Sigma Green Belt CertificadoPedro Martin PerezAún no hay calificaciones
- Literatura El PeatonDocumento11 páginasLiteratura El Peatonana gabriela trindade bentancourtAún no hay calificaciones
- Serp4570 04 01 AllDocumento746 páginasSerp4570 04 01 AllAlvaroAún no hay calificaciones
- "Pistón Neumático para Puerta de AutobúsDocumento11 páginas"Pistón Neumático para Puerta de AutobúsJose francisco Zamora velardeAún no hay calificaciones
- Antecedentes Históricos de La MecánicaDocumento4 páginasAntecedentes Históricos de La Mecánicasandra gomez0% (1)
- Diapositiva de AyramDocumento14 páginasDiapositiva de AyramAyram Mejia PilierAún no hay calificaciones
- Alternativa ProductivaDocumento2 páginasAlternativa ProductivaWILLIAM DELGADOAún no hay calificaciones
- 1° Informe Ley de NewtonDocumento10 páginas1° Informe Ley de NewtonLucia Pacheco VasquezAún no hay calificaciones
- Informe Psicológico Del Test de Los ColoresDocumento3 páginasInforme Psicológico Del Test de Los ColoresErik Andre LimachiAún no hay calificaciones
- Recurso AlzadaDocumento26 páginasRecurso AlzadabeabachiAún no hay calificaciones
- Correlaciones de Transferencia de Masa ConvectivaDocumento8 páginasCorrelaciones de Transferencia de Masa ConvectivaEdyAún no hay calificaciones
- Gerencia Estrategica y Prospectiva - CmiDocumento9 páginasGerencia Estrategica y Prospectiva - CmilucyAún no hay calificaciones
- 16 Proc - Hse - 016 Procedimiento de Autorización de VisitasDocumento11 páginas16 Proc - Hse - 016 Procedimiento de Autorización de VisitasAzumy Lorena Lopez N. AzumyAún no hay calificaciones
- Test Es Usted NegociadorDocumento5 páginasTest Es Usted NegociadorStephany VillanuevaAún no hay calificaciones
- Pensamiento LeanDocumento43 páginasPensamiento LeanVerónicaHamAún no hay calificaciones
- Fundamentos Sistemas Propulsion I PDFDocumento127 páginasFundamentos Sistemas Propulsion I PDFyeisonAún no hay calificaciones
- Me Tengo AMiDocumento60 páginasMe Tengo AMiValentina Denisse Fuentes Retamales100% (6)
- 04 Ind 254 Trabajo GradoDocumento110 páginas04 Ind 254 Trabajo GradoIsabel Torres GutiérrezAún no hay calificaciones
- Introducción: Tema 7. Comunicación Del Marketing IntegradoDocumento14 páginasIntroducción: Tema 7. Comunicación Del Marketing IntegradoGabriela RosasAún no hay calificaciones
- Tarea Vi La Uapa Como Modalidad Educativa A Distancia.Documento3 páginasTarea Vi La Uapa Como Modalidad Educativa A Distancia.Orquidea FriasAún no hay calificaciones
- Personal Social 26-10-2021Documento2 páginasPersonal Social 26-10-2021Jhon Maicol Chavez AlayaAún no hay calificaciones
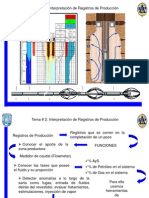
- Interpretación de Registros de ProducciónDocumento173 páginasInterpretación de Registros de ProducciónEmerson Ipiales Gudiño100% (2)
- Materiales para Redes AereasDocumento16 páginasMateriales para Redes Aereaspablo tenecotaAún no hay calificaciones