También podría gustarte
- Operaciones auxiliares de servicios de la aeronave. TMVO0109De EverandOperaciones auxiliares de servicios de la aeronave. TMVO0109Aún no hay calificaciones
- Instructor de Vuelo - Semana 4Documento23 páginasInstructor de Vuelo - Semana 4Eduardo CruzadoAún no hay calificaciones
- Apuntes Rotor de HelicópteroDocumento17 páginasApuntes Rotor de HelicópteroLuis Alberto Muñumel Millan100% (1)
- PREVUELODocumento7 páginasPREVUELOCARLOS ANDRES OROZCO HINCAPIEAún no hay calificaciones
- Enseñando DoE Con Helicópteros de Papel y MinitabDocumento20 páginasEnseñando DoE Con Helicópteros de Papel y MinitabRoberto Orozco SanchezAún no hay calificaciones
- Códigos de Velocidades AeronáuticasDocumento3 páginasCódigos de Velocidades Aeronáuticaseljonny01100% (1)
- Instructor de Vuelo - Semana 12Documento25 páginasInstructor de Vuelo - Semana 12Eduardo CruzadoAún no hay calificaciones
- Teoria Del Vuelo Por InstrumentosDocumento8 páginasTeoria Del Vuelo Por InstrumentosLuis Diego RamirezAún no hay calificaciones
- Operaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109De EverandOperaciones auxiliares de mantenimiento externo de la aeronave. TMVO0109Aún no hay calificaciones
- Teoria Del CR 3Documento8 páginasTeoria Del CR 3coordinadorAún no hay calificaciones
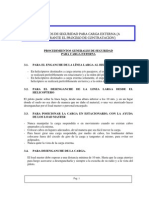
- Anexo Seguridad Helicopteros Carga ExternaDocumento28 páginasAnexo Seguridad Helicopteros Carga ExternaGabriel Tissone50% (2)
- Instrumentos de AviaciónDocumento71 páginasInstrumentos de AviaciónWilhelm Cuicas100% (1)
- Alas y Enlace #1Documento40 páginasAlas y Enlace #1Carlos BenitezAún no hay calificaciones
- Instructor de Vuelo - Semana 3Documento41 páginasInstructor de Vuelo - Semana 3Eduardo CruzadoAún no hay calificaciones
- Repaso NavegacionDocumento16 páginasRepaso Navegacionisabel lagoeyteAún no hay calificaciones
- Instructor de Vuelo - Semana 6Documento38 páginasInstructor de Vuelo - Semana 6Eduardo CruzadoAún no hay calificaciones
- 6 Teoria Motores Reciprocos DesempenoDocumento14 páginas6 Teoria Motores Reciprocos DesempenoJorge Varela100% (1)
- Como Funcionan Los HelicópterosDocumento17 páginasComo Funcionan Los HelicópterosJuan ArcosAún no hay calificaciones
- Instructor de Vuelo - Semana 10Documento32 páginasInstructor de Vuelo - Semana 10Eduardo CruzadoAún no hay calificaciones
- HelicopterosDocumento4 páginasHelicopterosMaver Crc100% (1)
- Mantenimiento auxiliar del acondicionamiento interior de aeronaves. TMVO0109De EverandMantenimiento auxiliar del acondicionamiento interior de aeronaves. TMVO0109Aún no hay calificaciones
- Curso de Piloto Privado Seccion A RevDocumento12 páginasCurso de Piloto Privado Seccion A RevochunbumiAún no hay calificaciones
- Aerodinamica Del HelicopteroDocumento23 páginasAerodinamica Del HelicopteroEnrique VargasAún no hay calificaciones
- InstrumentosDocumento23 páginasInstrumentosjalexandermm100% (1)
- Motores ReciprocosDocumento43 páginasMotores ReciprocosArturo Zugarazo67% (3)
- Principios de Vuelo Del HelicopteroDocumento37 páginasPrincipios de Vuelo Del HelicopteroCesar mancillaAún no hay calificaciones
- Para Esto Son Las Alas: Volar Es Un Arte Que Se Afina Con La VidaDe EverandPara Esto Son Las Alas: Volar Es Un Arte Que Se Afina Con La VidaCalificación: 2 de 5 estrellas2/5 (1)
- BarrenaDocumento4 páginasBarrenaViviana Karen Lima IrigoyenAún no hay calificaciones
- Rotor de HelicópteroDocumento5 páginasRotor de HelicópteroalejandroAún no hay calificaciones
- Informe de Helipuertos UltimoDocumento25 páginasInforme de Helipuertos Ultimocarlos davalos huillca100% (1)
- TURBOEJESDocumento5 páginasTURBOEJESBlueOneGaussAún no hay calificaciones
- Bell 212 Capitulo 1. Descripcion General v4Documento19 páginasBell 212 Capitulo 1. Descripcion General v4santoyo70100% (3)
- PROGR AerodinámicaDocumento10 páginasPROGR AerodinámicaAlex UchihaAún no hay calificaciones
- Aerodinámica de HelicópterosDocumento4 páginasAerodinámica de HelicópteroscabrerahwilsonAún no hay calificaciones
- Mnto Grua Costa AfueraDocumento45 páginasMnto Grua Costa Afueranayo182Aún no hay calificaciones
- Aquellos aviones de Pocito: Chincul y la industria aeronáutica argentina (1972-1995)De EverandAquellos aviones de Pocito: Chincul y la industria aeronáutica argentina (1972-1995)Calificación: 4 de 5 estrellas4/5 (1)
- Mandos y Funcionamiento Helicoptero PDFDocumento6 páginasMandos y Funcionamiento Helicoptero PDFjose antonio carazoAún no hay calificaciones
- Mantenimiento auxiliar de sistemas eléctricos de aeronaves. TMVO0109De EverandMantenimiento auxiliar de sistemas eléctricos de aeronaves. TMVO0109Aún no hay calificaciones
- Aerodinamica HelicopterosDocumento114 páginasAerodinamica HelicopterosRachael Murray100% (1)
- ManualDocumento15 páginasManualAnthony VicentAún no hay calificaciones
- Teoría de Helicopteros III PDFDocumento7 páginasTeoría de Helicopteros III PDFRafaelTovarAún no hay calificaciones
- Unidad Vi Motor Turbo EjeDocumento24 páginasUnidad Vi Motor Turbo EjeTryndamereXperienceAún no hay calificaciones
- Sistema de Vuelo Automatico GeneralidadesDocumento34 páginasSistema de Vuelo Automatico GeneralidadesLuis Jesus GonzalezAún no hay calificaciones
- AerodinamicaDocumento5 páginasAerodinamicapedroescorciaAún no hay calificaciones
- La Dinámica de VueloDocumento6 páginasLa Dinámica de VuelopoamtAún no hay calificaciones
- Sistema de HélicesDocumento12 páginasSistema de HélicesJulian ZuñigaAún no hay calificaciones
- Tren de AterrizajeDocumento3 páginasTren de AterrizajeEnriqueAún no hay calificaciones
- Partes de Un HelicópteroDocumento3 páginasPartes de Un HelicópteroCristian Garcia100% (1)
- Piper PA-11 Lecciones de Vuelo 05Documento10 páginasPiper PA-11 Lecciones de Vuelo 05TakiraryAún no hay calificaciones
- DCS Su-27 Resumen de Manual de Vuelo - ESDocumento30 páginasDCS Su-27 Resumen de Manual de Vuelo - ESbouchard10Aún no hay calificaciones
- TurboshaftDocumento5 páginasTurboshaftjhon EXTREMAAún no hay calificaciones
- Aerodinamica de HelicopterosDocumento32 páginasAerodinamica de HelicopterosLawrence Hurley100% (2)
- GUIA 1 TEMA 1 - Diagramas de AeronavesDocumento6 páginasGUIA 1 TEMA 1 - Diagramas de AeronavesDeivis MartínezAún no hay calificaciones
- Como Funciona El Motor de TurbinaDocumento7 páginasComo Funciona El Motor de TurbinaHugo Causil RamosAún no hay calificaciones
- Guia Fraseologia Vuelo IFRDocumento13 páginasGuia Fraseologia Vuelo IFRcaraguiaAún no hay calificaciones
- Resumen de AvionicaDocumento8 páginasResumen de AvionicaAndelson DuarteAún no hay calificaciones
- Efecto Coriolis y Coanda en Los HelicopterosDocumento10 páginasEfecto Coriolis y Coanda en Los HelicopterosLiney Jharitza Escobar Bonilla0% (1)
- Aerodinámica Del Rotor - 5Documento22 páginasAerodinámica Del Rotor - 5Carlos Ezequiel GalarzaAún no hay calificaciones
- Equipos de Asistencia en TierraDocumento8 páginasEquipos de Asistencia en TierraEstractovokal Hiphomaniatico DlCrewAún no hay calificaciones
- T Espe 038482 PDFDocumento135 páginasT Espe 038482 PDFBorja Calderón RosarioAún no hay calificaciones
- Instrumentos Del Avion PresentacionDocumento69 páginasInstrumentos Del Avion PresentacionAlan Irak Ascencio Maldonado0% (1)
- Controles de VueloDocumento13 páginasControles de VueloreloxAún no hay calificaciones
- Rotores CoaxialesDocumento6 páginasRotores CoaxialesLuis Alberto Muñumel MillanAún no hay calificaciones
- Concepto E HistoriaDocumento13 páginasConcepto E HistoriaROBERT LEONARDO SOTO CORREAAún no hay calificaciones
- Los Mandos de Un Helicoptero PDFDocumento8 páginasLos Mandos de Un Helicoptero PDFLeonid PerezAún no hay calificaciones
- Los Talleres AeronáuticosDocumento5 páginasLos Talleres AeronáuticosRicardoAún no hay calificaciones
- Sector Aeroespacial MX Jul 2022Documento70 páginasSector Aeroespacial MX Jul 2022squeezeAún no hay calificaciones
- Abrir La Carpeta Equipos 6Documento374 páginasAbrir La Carpeta Equipos 6marcing1010Aún no hay calificaciones
- Angulo de Coneo CorrectoDocumento3 páginasAngulo de Coneo CorrectoAero Navi100% (1)
- Cie 35-51-13 Experiencias Operativas en El VraemDocumento150 páginasCie 35-51-13 Experiencias Operativas en El VraemCarlos Yauri Chahua100% (1)
- 20 RDAC Parte 061 Nueva Edicion Enm 7 27 05 19 1Documento82 páginas20 RDAC Parte 061 Nueva Edicion Enm 7 27 05 19 1luis zhuninAún no hay calificaciones
- Mooc Upm Drones 23Documento11 páginasMooc Upm Drones 23Fernando VasquezAún no hay calificaciones
- Laboratorio #2 - CinemáticaDocumento3 páginasLaboratorio #2 - CinemáticaCristina MendozaAún no hay calificaciones
- Teatro de ObjetosDocumento9 páginasTeatro de ObjetosJulio César CorvalánAún no hay calificaciones
- Clase 9Documento8 páginasClase 9Kevin Patricio VillalbaAún no hay calificaciones
- Sistemas de InstrumentaciónDocumento5 páginasSistemas de InstrumentaciónRoberto CorreuAún no hay calificaciones
- Atunero Revista IngenieriaDocumento11 páginasAtunero Revista Ingenieriafores2Aún no hay calificaciones
- HANGARESDocumento3 páginasHANGARESAlberto Molina HernandezAún no hay calificaciones
- CERDÁ - Estudio Técnico-Económico de Desarrollo y Fabricación de Un Ala Ligera para Un Avión de A PDFDocumento182 páginasCERDÁ - Estudio Técnico-Económico de Desarrollo y Fabricación de Un Ala Ligera para Un Avión de A PDFManuel CruzAún no hay calificaciones
- Problemas V Unidad PDFDocumento2 páginasProblemas V Unidad PDFMary RodAún no hay calificaciones
- Resolucion Ejercicios Mecanica de FluidosDocumento14 páginasResolucion Ejercicios Mecanica de FluidosDerian Duran AymachoqueAún no hay calificaciones
- Artículo JSTDocumento5 páginasArtículo JSTCarlaAún no hay calificaciones
- Trabajo de Probatorio Caso Santo DomingoDocumento17 páginasTrabajo de Probatorio Caso Santo DomingoJenny Patricia Perez PolaniaAún no hay calificaciones
- Estudio Factorial Completo1Documento10 páginasEstudio Factorial Completo1Lizeth BarajasAún no hay calificaciones
- Clasificación Del Transporte AéreoDocumento8 páginasClasificación Del Transporte Aéreoandres joaoAún no hay calificaciones
- Instrumentos Aneroide MI-8Documento4 páginasInstrumentos Aneroide MI-8Jmarc JimenezAún no hay calificaciones
- Generalidades Del Sitema Hidraulico en Un HelicópteroDocumento5 páginasGeneralidades Del Sitema Hidraulico en Un HelicópteropedroescorciaAún no hay calificaciones