También podría gustarte
- 1 Respuesta Transitoria de Sistemas de 1er OrdenDocumento14 páginas1 Respuesta Transitoria de Sistemas de 1er OrdenThalia Izaguirre LagunaAún no hay calificaciones
- Turbinas de Vapor SSTDocumento5 páginasTurbinas de Vapor SSTG Kevin ValleAún no hay calificaciones
- Transferencia de Calor en Estado TransitorioDocumento22 páginasTransferencia de Calor en Estado TransitorioAngel Diaz Rey0% (2)
- Analisis de Respuesta TransitoriaDocumento9 páginasAnalisis de Respuesta TransitoriaJesús Castrillón ValenciaAún no hay calificaciones
- 3 EvalDocumento11 páginas3 EvalJoel PeraltaAún no hay calificaciones
- Cuestionario de TermoDocumento3 páginasCuestionario de TermoSalazarJesus100% (2)
- Informe Termoandes-2Documento14 páginasInforme Termoandes-2choriparicateAún no hay calificaciones
- 1 Conceptos Introductorios A Los MicrocontroladoresDocumento13 páginas1 Conceptos Introductorios A Los Microcontroladoresmadruga.bernalAún no hay calificaciones
- Ciclo de RankineDocumento35 páginasCiclo de RankineMartin GroppaAún no hay calificaciones
- Clase 13 Sistemas de Primer OrdenDocumento22 páginasClase 13 Sistemas de Primer OrdenBraulio ala andiaAún no hay calificaciones
- PROBLEMAS Diaz David y Vasquez MaritzaDocumento1 páginaPROBLEMAS Diaz David y Vasquez MaritzamariitzaAún no hay calificaciones
- Tarea de Cuestionario ResueltaDocumento5 páginasTarea de Cuestionario ResueltaCristian Rey SanchezAún no hay calificaciones
- Ejemplo de Un Diagnostico Energético PDFDocumento48 páginasEjemplo de Un Diagnostico Energético PDFfacma00Aún no hay calificaciones
- Trabajo EspecialDocumento31 páginasTrabajo EspecialLuis Enrique Gutiérrez100% (1)
- Diseño de Una Turbina de Vapor para Una Central Termoeléctrica - Tesis Meximo Simon Huaman EstebanDocumento242 páginasDiseño de Una Turbina de Vapor para Una Central Termoeléctrica - Tesis Meximo Simon Huaman Estebanluisulloaim100% (1)
- Metodo NtuDocumento2 páginasMetodo NtuVictoriaMvAún no hay calificaciones
- Mezclas Reactivas de Gases, Ciclos Binarios, Plantas Nucleares y Ciclos Combinados Termodinamica IIDocumento20 páginasMezclas Reactivas de Gases, Ciclos Binarios, Plantas Nucleares y Ciclos Combinados Termodinamica IIMilton MurilloAún no hay calificaciones
- Laboratorio de Ingenieria Mecanica II - Calderos A VaporDocumento23 páginasLaboratorio de Ingenieria Mecanica II - Calderos A VaporMirko Yanque Tomasevich100% (1)
- UNIDAD I-1.6 Analisis Del Transformador IdealDocumento24 páginasUNIDAD I-1.6 Analisis Del Transformador IdealJUAN PABLO LERMA SÀNCHEZAún no hay calificaciones
- Ciclo Combinado Gas-VaporDocumento18 páginasCiclo Combinado Gas-VaporFabricio BCAún no hay calificaciones
- F L DT Pisando y GenerandoDocumento22 páginasF L DT Pisando y GenerandoGerardo TexisAún no hay calificaciones
- Marco Teórico Turbomaquinas Por Kelvin Ariel Yanes SortoDocumento4 páginasMarco Teórico Turbomaquinas Por Kelvin Ariel Yanes SortoLuis Alonso Argueta MartínezAún no hay calificaciones
- Impedancia en Serie de Las Lineas de TransmisionDocumento24 páginasImpedancia en Serie de Las Lineas de TransmisionOscar Ulises OsorioAún no hay calificaciones
- AUTO Informe 7Documento3 páginasAUTO Informe 7Alejandro GonzalezAún no hay calificaciones
- UNIDAD 1. - INTRODUCCIÓN PresentaciónDocumento23 páginasUNIDAD 1. - INTRODUCCIÓN PresentaciónDaniel SanchezAún no hay calificaciones
- Practica 4 I-2020 MEC430Documento4 páginasPractica 4 I-2020 MEC430Alexander Quispe ApazaAún no hay calificaciones
- Dinamicadelacombinacion Motor-Carga. EstabilidadDocumento2 páginasDinamicadelacombinacion Motor-Carga. Estabilidadjhon pucaAún no hay calificaciones
- Laboratorio 5 TermodinamicaDocumento9 páginasLaboratorio 5 TermodinamicaNicolas Alvarez LunaAún no hay calificaciones
- Máquinas Eléctricas (6a. Ed.) - (PG 812 - 820)Documento9 páginasMáquinas Eléctricas (6a. Ed.) - (PG 812 - 820)rodrigo sepulvedaAún no hay calificaciones
- U1 TermicosDocumento7 páginasU1 TermicosAlexis Uriel Silva GutierrezAún no hay calificaciones
- Aplicaciones de Los Motores DCDocumento5 páginasAplicaciones de Los Motores DCNilson AtenciaAún no hay calificaciones
- Pract 05 - 2021. Convec - Interna - CalorDocumento6 páginasPract 05 - 2021. Convec - Interna - Calorjohana chiAún no hay calificaciones
- SECUENCIA A+B+A-B - y B+B-A+ADocumento19 páginasSECUENCIA A+B+A-B - y B+B-A+ATin RamosAún no hay calificaciones
- Maquinas y Equipos Termicos 1-1Documento23 páginasMaquinas y Equipos Termicos 1-1GERADOAún no hay calificaciones
- Unidad 2 - Ciclo de GasDocumento5 páginasUnidad 2 - Ciclo de GasAbraham Moreno Abundez100% (1)
- REPORTE #4 Labview PDFDocumento6 páginasREPORTE #4 Labview PDFJesús EHAún no hay calificaciones
- CELEC EP - Hidropaute - Paute - CardenilloDocumento12 páginasCELEC EP - Hidropaute - Paute - CardenilloStevens ZambranoAún no hay calificaciones
- Actividad 2Documento56 páginasActividad 2Enrique FanesAún no hay calificaciones
- Grupo 14Documento10 páginasGrupo 14Oscar Enrique Ojeda GarciaAún no hay calificaciones
- Ejes, Flechas y ComponentesDocumento14 páginasEjes, Flechas y ComponentescristianAún no hay calificaciones
- Generador de Corriente Alterna y Regulador de VoltajeDocumento6 páginasGenerador de Corriente Alterna y Regulador de Voltajeromo2345Aún no hay calificaciones
- Ciclo RankineDocumento9 páginasCiclo RankineChus PerezAún no hay calificaciones
- PV - 2 - Fundamentos de La Conversión FotovoltaicaDocumento30 páginasPV - 2 - Fundamentos de La Conversión FotovoltaicaIvan OstaAún no hay calificaciones
- Limite de BetzDocumento4 páginasLimite de BetzAldo SilvaAún no hay calificaciones
- Criterios de Selección y Montaje de Equipos de Refrigeración en Aplicaciones Convencionales-2Documento15 páginasCriterios de Selección y Montaje de Equipos de Refrigeración en Aplicaciones Convencionales-2Camio HormazabalAún no hay calificaciones
- A) Temple en Agua A Temperatura Ambiente: Kelvin Toasa 8040Documento20 páginasA) Temple en Agua A Temperatura Ambiente: Kelvin Toasa 8040Kelvin ToasaAún no hay calificaciones
- Convección Natural Sobre Una Placa VerticalDocumento13 páginasConvección Natural Sobre Una Placa VerticalRigo RodríguezAún no hay calificaciones
- Problemas de Ciclo Rankine Ideal de VaporDocumento33 páginasProblemas de Ciclo Rankine Ideal de VaporManuel Xool HerreraAún no hay calificaciones
- Actividad Propuesta 1Documento2 páginasActividad Propuesta 1Yiro Renteria monjaAún no hay calificaciones
- Sistemas Termoeléctricos de Generación de Potencia y de RefrigeraciónDocumento9 páginasSistemas Termoeléctricos de Generación de Potencia y de RefrigeraciónElisvanParilloAún no hay calificaciones
- Ciclo Brayton para Motor de ReacciónDocumento14 páginasCiclo Brayton para Motor de ReacciónEudis ChirinosAún no hay calificaciones
- Ciclo Brayton 111Documento18 páginasCiclo Brayton 111Ronald Javier Saico SuclleAún no hay calificaciones
- Compensador de Temperatura Con Arduino y MatlabDocumento9 páginasCompensador de Temperatura Con Arduino y Matlabjaquiador96Aún no hay calificaciones
- Principios Básicos de La Utilizacion de VaporDocumento31 páginasPrincipios Básicos de La Utilizacion de VaporJhosep LeivaAún no hay calificaciones
- Resumen IEEEDocumento5 páginasResumen IEEEAnthony MarquezAún no hay calificaciones
- Lab. Sistema de Primer Orden y Segundo OrdenDocumento15 páginasLab. Sistema de Primer Orden y Segundo OrdenbernardoAún no hay calificaciones
- Ciclo RankineDocumento6 páginasCiclo RankineAlfredoAún no hay calificaciones
- Ecuación Fundamental Turbomáquinas, Ecuación Euler 1ra Forma, Año - 2023Documento31 páginasEcuación Fundamental Turbomáquinas, Ecuación Euler 1ra Forma, Año - 2023GersonAún no hay calificaciones
- Respuesta TransitoriaDocumento7 páginasRespuesta TransitoriaOscar Reyes AtemizAún no hay calificaciones
- 3.2.2 Parametros de La Respuesta Subamortiguada Ante La Entrada EscalonDocumento10 páginas3.2.2 Parametros de La Respuesta Subamortiguada Ante La Entrada EscalonJossimar MoraAún no hay calificaciones
- 3 EPN-DD-2020-0047-M, Informe Rediseño para Registro Carrera en MecánicaDocumento87 páginas3 EPN-DD-2020-0047-M, Informe Rediseño para Registro Carrera en MecánicaAlex Nicolas QuingaAún no hay calificaciones
- Proyecto FluidosDocumento7 páginasProyecto FluidosAlex Nicolas QuingaAún no hay calificaciones
- EGC Industria de La ConfecciónDocumento26 páginasEGC Industria de La ConfecciónAlex Nicolas QuingaAún no hay calificaciones
- Hoja14 PDFDocumento2 páginasHoja14 PDFAlex Nicolas QuingaAún no hay calificaciones
- Quinga Oña Alex Nicolás - Otros DeberesDocumento9 páginasQuinga Oña Alex Nicolás - Otros DeberesAlex Nicolas QuingaAún no hay calificaciones
- Ejercicios de Cinematica y DinamicaDocumento100 páginasEjercicios de Cinematica y DinamicaAlex Nicolas Quinga100% (1)
- T P AGROPECUARIA Sector Agropecuario PDFDocumento76 páginasT P AGROPECUARIA Sector Agropecuario PDFsebastian morgadoAún no hay calificaciones
- GFPI-F-019 Formato Guía de Aprendizaje ExcelDocumento17 páginasGFPI-F-019 Formato Guía de Aprendizaje ExcelJhon Sebastian Ramirez MendezAún no hay calificaciones
- Alcances Sobre Anexo 4 y 5Documento2 páginasAlcances Sobre Anexo 4 y 5MAIKEL Ñ LAún no hay calificaciones
- Isomeria Optica QuimicaDocumento10 páginasIsomeria Optica QuimicaYancy Alvarez de Jaimes100% (2)
- Planificacion de La Cebolla en TacnaDocumento23 páginasPlanificacion de La Cebolla en TacnaBhianca Ramides Alevarez0% (1)
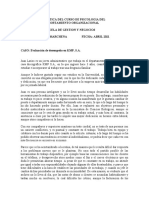
- Caso Evaluacion Del DesempeñoDocumento2 páginasCaso Evaluacion Del DesempeñoRoss Anticona ValdiviaAún no hay calificaciones
- Estrategias de Intervención para Alumnos Con Trastorno Por Deficit de Atención Con HiperactividadDocumento6 páginasEstrategias de Intervención para Alumnos Con Trastorno Por Deficit de Atención Con Hiperactividadanel vega100% (1)
- Undidad 2 HiperestacidadDocumento15 páginasUndidad 2 HiperestacidadKaren Leyden Suxe VillalobosAún no hay calificaciones
- 01 Informe - de - Evaluación - de - Riesgos PDFDocumento62 páginas01 Informe - de - Evaluación - de - Riesgos PDFNilss Ochoa LimayAún no hay calificaciones
- Ciclo Del NitrogenoDocumento7 páginasCiclo Del NitrogenoNicolas PalacioAún no hay calificaciones
- Ejercicico 15Documento2 páginasEjercicico 15Mary SkrilleraAún no hay calificaciones
- Manual de Usuario T10Documento14 páginasManual de Usuario T10ItzLuis A.Aún no hay calificaciones
- Examen Final Enviar 24 Mayo 22Documento8 páginasExamen Final Enviar 24 Mayo 22Sebastián Hernández GonzálezAún no hay calificaciones
- Tema 03 Ejercicios SinónimosDocumento2 páginasTema 03 Ejercicios SinónimosDina LimachiAún no hay calificaciones
- PP Blanco Adhesivo Caucho (Nuevo)Documento1 páginaPP Blanco Adhesivo Caucho (Nuevo)ayrton carls zamora cardenasAún no hay calificaciones
- Riqueza Cultural en GuatemalaDocumento10 páginasRiqueza Cultural en GuatemalaDaniel Lopez0% (1)
- Gestión de AgronegociosDocumento46 páginasGestión de AgronegociosEddy Wilfredo Cruz CanazaAún no hay calificaciones
- MAPA MENTAL Niveles Del Planeamiento EducativoDocumento1 páginaMAPA MENTAL Niveles Del Planeamiento EducativoCharlystudentAún no hay calificaciones
- Arcenio PechaDocumento278 páginasArcenio PechaAngello Custodio TafurAún no hay calificaciones
- Informe Práctica #7 Ondas EstacionariasDocumento11 páginasInforme Práctica #7 Ondas EstacionariasKeidy Mayerli Cortes RozoAún no hay calificaciones
- Informe Obs Con Curso Contratacion Doc 11Documento45 páginasInforme Obs Con Curso Contratacion Doc 11WissnaldyAún no hay calificaciones
- Elementos de Cálculo Diferencial e Integral - Tomo I - Sadosky, Guber - 1ed PDFDocumento143 páginasElementos de Cálculo Diferencial e Integral - Tomo I - Sadosky, Guber - 1ed PDFcachojrAún no hay calificaciones
- Libre Pensamiento 105 1Documento120 páginasLibre Pensamiento 105 1nu_01001110Aún no hay calificaciones
- RacionalismoDocumento6 páginasRacionalismoAndrea AlzateAún no hay calificaciones
- Informe de Laboratorio - Rectificador Semicontrolado Monofásico de Onda Completa. Salgado, Pardo.Documento4 páginasInforme de Laboratorio - Rectificador Semicontrolado Monofásico de Onda Completa. Salgado, Pardo.ipardodAún no hay calificaciones
- Guia Semana 5Documento4 páginasGuia Semana 5Marleth Lechuga SierraAún no hay calificaciones
- Reseña 2Documento3 páginasReseña 2Melisa Thiara Paz LauraAún no hay calificaciones
- Conocemos Nuestra Escuela y Dibujamos: Sesión de AprendizajeDocumento6 páginasConocemos Nuestra Escuela y Dibujamos: Sesión de AprendizajeDenis Marilu Ordoñez Baldera0% (1)
- Carga Fuego EjmploDocumento3 páginasCarga Fuego EjmploDebora AntunezAún no hay calificaciones
- AgendaDigital LibroDocumento703 páginasAgendaDigital LibroPe LUAún no hay calificaciones