También podría gustarte
- VCO Con AmplificadoresDocumento10 páginasVCO Con AmplificadoresaguimAún no hay calificaciones
- 1.2 Dispositivos de DisparoDocumento16 páginas1.2 Dispositivos de DisparoRicardo Ballesteros MartínezAún no hay calificaciones
- La Inteligencia ArtificialDocumento4 páginasLa Inteligencia ArtificialCheryl AllenAún no hay calificaciones
- 2 TL 494 5Documento20 páginas2 TL 494 5KevinEstebanVillaneraAún no hay calificaciones
- Fuentes ConmutadasDocumento2 páginasFuentes ConmutadasLaura GrimaldosAún no hay calificaciones
- Abb Arrancadores SuavesDocumento3 páginasAbb Arrancadores SuavesraulitoroqueAún no hay calificaciones
- Ejercicios Propuestos Amplificadores de PotenciaDocumento7 páginasEjercicios Propuestos Amplificadores de PotenciaCarlosEduardoNavarroPachecoAún no hay calificaciones
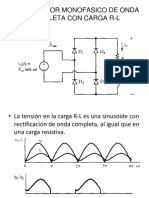
- Rectificador Monofasico de Onda Completa Con Carga R LDocumento14 páginasRectificador Monofasico de Onda Completa Con Carga R LANA BELEN MORENO CORDOVAAún no hay calificaciones
- Convertidor BoostDocumento4 páginasConvertidor BoostA.JAún no hay calificaciones
- Informe Fuente Dual Regulada de TensiónDocumento5 páginasInforme Fuente Dual Regulada de TensiónJorge Eduardo Zapata MejiaAún no hay calificaciones
- Práctica 3 Rectificador de Onda Completa Tipo PuenteDocumento13 páginasPráctica 3 Rectificador de Onda Completa Tipo PuenteDiacono100% (1)
- Reporte de Un Regulador de VoltajeDocumento6 páginasReporte de Un Regulador de VoltajeAries UvAún no hay calificaciones
- Lab. 7 - Circuito de Disparo Por Pulsos Con 555Documento3 páginasLab. 7 - Circuito de Disparo Por Pulsos Con 555Wendy JiménezAún no hay calificaciones
- 2021 Tiristores 30.8Documento42 páginas2021 Tiristores 30.8Stephano AlvaradoAún no hay calificaciones
- Formato Preparatorio - LaboratorioDocumento6 páginasFormato Preparatorio - LaboratorioOscar DavidAún no hay calificaciones
- Circuitos Buck, Boost y Buck-BoostDocumento5 páginasCircuitos Buck, Boost y Buck-BoostGeovanhy VernazaAún no hay calificaciones
- MCT TiristorDocumento2 páginasMCT TiristorGonzalo ViñamaguaAún no hay calificaciones
- Guia Docente Fuentes de Alimentacion ReguladasDocumento41 páginasGuia Docente Fuentes de Alimentacion Reguladas123juanreyesAún no hay calificaciones
- CicloconvertidoresDocumento25 páginasCicloconvertidoresTulio Escobar ZamoraAún no hay calificaciones
- Practica 9 Inciso A)Documento8 páginasPractica 9 Inciso A)Jose PucAún no hay calificaciones
- Aplicaciones No Lineales Del Amplificador OperacionalDocumento9 páginasAplicaciones No Lineales Del Amplificador OperacionalIsabel50% (2)
- Sumador Restador de 8 BitsDocumento13 páginasSumador Restador de 8 BitsKarlita Muyulema100% (1)
- El Transistor Como AmplificadorDocumento4 páginasEl Transistor Como AmplificadorMARTIN RODOLFO LIZOLA GOMEZAún no hay calificaciones
- Cuadruplicador DeasfasfasfasfasfasfasfasDocumento4 páginasCuadruplicador Deasfasfasfasfasfasfasfasdaos28Aún no hay calificaciones
- TRABAJO DE INVESTIGACION Amplificadores OperacionalesDocumento7 páginasTRABAJO DE INVESTIGACION Amplificadores OperacionalesJuan David Rodriguez BeltranAún no hay calificaciones
- Practicas UmssDocumento10 páginasPracticas UmssrobyAún no hay calificaciones
- 1.1.1.caracteristicas y Parametros de Diodos de PotenciaDocumento5 páginas1.1.1.caracteristicas y Parametros de Diodos de PotenciaVitola CampuzanoAún no hay calificaciones
- Resumen Chopper-TroceadorDocumento22 páginasResumen Chopper-TroceadorRonny Brito100% (1)
- Cuestionario Resuelto Version 2Documento14 páginasCuestionario Resuelto Version 2Ricardo Fossatti HernandezAún no hay calificaciones
- Capitulo 8 WordDocumento104 páginasCapitulo 8 Word....Aún no hay calificaciones
- Convertidores DC-DC PDFDocumento108 páginasConvertidores DC-DC PDFMarcos VeraAún no hay calificaciones
- Informe 3 CEDocumento4 páginasInforme 3 CEJhon Cando PuenayanAún no hay calificaciones
- Parcial 1 PDFDocumento1 páginaParcial 1 PDFAntonio ChoquevilcaAún no hay calificaciones
- Ensayos de Vacío y Corto Circuito de Un Transformador 1ΦDocumento9 páginasEnsayos de Vacío y Corto Circuito de Un Transformador 1ΦJonathan PeñaAún no hay calificaciones
- LAB N°4 - SCR en Corriente AlternaDocumento5 páginasLAB N°4 - SCR en Corriente Alternajose tarazona ambrocioAún no hay calificaciones
- Preparatorio 9 Sistemas DigitalesDocumento11 páginasPreparatorio 9 Sistemas DigitalesJuanCarlos JCAún no hay calificaciones
- Rectificación Monofásica de Conmutación Natural Sin FiltrosDocumento18 páginasRectificación Monofásica de Conmutación Natural Sin FiltrosVickFrAún no hay calificaciones
- Práctica 5Documento2 páginasPráctica 5jorge quintero galindoAún no hay calificaciones
- Cálculos Básicos en Una Fuente DCDocumento6 páginasCálculos Básicos en Una Fuente DCmacelly0% (1)
- Ejercicos en Atmega 164p Uso de Interrupciones y Teclado MatricialDocumento7 páginasEjercicos en Atmega 164p Uso de Interrupciones y Teclado MatricialWilmer Villegas CodenaAún no hay calificaciones
- Cuarto CuadranteDocumento6 páginasCuarto CuadranteJonathan StalinAún no hay calificaciones
- PRACTICA 9 Control de Fase DM 2020BDocumento9 páginasPRACTICA 9 Control de Fase DM 2020BAdolfo Rojas ArellanoAún no hay calificaciones
- Laboratorio 1 - Telecom IDocumento4 páginasLaboratorio 1 - Telecom Irodrigo_martínez_92Aún no hay calificaciones
- Preparatorio 4 ELECTRONICA DE POTENCIADocumento4 páginasPreparatorio 4 ELECTRONICA DE POTENCIAIan BaqueroAún no hay calificaciones
- Informe Lab4 3817 Barreno Herrera Montenegro PDFDocumento28 páginasInforme Lab4 3817 Barreno Herrera Montenegro PDFMikael MontenegroAún no hay calificaciones
- Capitulo 1 Electronica de PotenciaDocumento30 páginasCapitulo 1 Electronica de PotenciaRuben Guerrero GarzaAún no hay calificaciones
- Simulación #5 Motor A PasosDocumento2 páginasSimulación #5 Motor A PasosThelma MoralesAún no hay calificaciones
- Optativa Informe 1Documento4 páginasOptativa Informe 1Henry D. LópezAún no hay calificaciones
- Diodos Con Cargas RC y RLDocumento6 páginasDiodos Con Cargas RC y RLraulpalacioAún no hay calificaciones
- Carrillo Jacobo Edgar. 6AM2. Tarea Tiristor - COM y CONV - CD - CD. COVID-19.Documento8 páginasCarrillo Jacobo Edgar. 6AM2. Tarea Tiristor - COM y CONV - CD - CD. COVID-19.Near YagamiAún no hay calificaciones
- Convertidor de Corriente Alterna A Corriente Alterna Trifásico Tipo Regulador Con Carga ResistivaDocumento3 páginasConvertidor de Corriente Alterna A Corriente Alterna Trifásico Tipo Regulador Con Carga ResistivaalfredoAún no hay calificaciones
- SD Hoja Guia 9 2020BDocumento2 páginasSD Hoja Guia 9 2020BAlexander LaraAún no hay calificaciones
- Ejercicios Resueltos ConvertidoresDocumento1 páginaEjercicios Resueltos Convertidoresfelipe taveraAún no hay calificaciones
- Circuito BootstrapDocumento4 páginasCircuito BootstrapFabricio Veintimilla BautistaAún no hay calificaciones
- CPST Preparatorio5 ZambranoJ PDFDocumento8 páginasCPST Preparatorio5 ZambranoJ PDFJuan Diego Zambrano TorresAún no hay calificaciones
- Ejercicios Conversion AdcDocumento2 páginasEjercicios Conversion AdcJessica Lorena Forero Castro100% (1)
- Practrica 4 Electronica de PotenciaDocumento5 páginasPractrica 4 Electronica de Potenciagenaro muozAún no hay calificaciones
- Multivibrador Monoestable Con Op-AmpDocumento3 páginasMultivibrador Monoestable Con Op-AmpAnais M Diaz CAún no hay calificaciones
- Proyecto Inversor Monofásico de Onda CuadradaDocumento15 páginasProyecto Inversor Monofásico de Onda CuadradaheyreheyreAún no hay calificaciones
- INFORME 5 Puente de WheatstoneDocumento13 páginasINFORME 5 Puente de WheatstoneSergio Andres Rincon Caupaz100% (1)
- Lab 3Documento11 páginasLab 3ROSAS MONTALVO JESUSAún no hay calificaciones
- Semiconvertidor MonofasicoDocumento23 páginasSemiconvertidor MonofasicoCarmenBarrientosAún no hay calificaciones
- Informe 10Documento12 páginasInforme 10nik alimber apaza sanchezAún no hay calificaciones
- Sistema PicaxeDocumento4 páginasSistema PicaxeEduardo GilAún no hay calificaciones
- Gibson - Les Paul Junior - Vintage Tobacco BurstDocumento1 páginaGibson - Les Paul Junior - Vintage Tobacco BurstAlejandro GonzalezAún no hay calificaciones
- Guia de Hardware ACM PDFDocumento532 páginasGuia de Hardware ACM PDFSulimar MarcanoAún no hay calificaciones
- HC SR04Documento3 páginasHC SR04Jaime Rupay CrucesAún no hay calificaciones
- Universidad de La SerenaDocumento14 páginasUniversidad de La SerenaHECTOR JOVANNY HEREDIA ARANCIBIAAún no hay calificaciones
- Banco Dinamométrico Hm-365Documento3 páginasBanco Dinamométrico Hm-365panterone456Aún no hay calificaciones
- Clase 1Documento24 páginasClase 1Fera SiulAún no hay calificaciones
- Comprobación Del Sensor MAP ?Documento2 páginasComprobación Del Sensor MAP ?Armando Amaro Díaz TapiaAún no hay calificaciones
- Linea BalanceadaDocumento8 páginasLinea BalanceadaMario Alberto CortesAún no hay calificaciones
- Motor Monofásico Con Condensador de Arranque y Motor Monofásico Con Condensador PermanenteDocumento6 páginasMotor Monofásico Con Condensador de Arranque y Motor Monofásico Con Condensador PermanenteIstvan100% (2)
- Sincronizacion de ProcesosDocumento12 páginasSincronizacion de ProcesosMareg1Aún no hay calificaciones
- Cotizacion 147Documento3 páginasCotizacion 147Jose Luis Aguero PomachaguaAún no hay calificaciones
- Compresor de ArchivosDocumento11 páginasCompresor de ArchivosSantiago Rivera100% (1)
- CID400 - Practica 2 (Algebra de Boole) - (I-2020)Documento1 páginaCID400 - Practica 2 (Algebra de Boole) - (I-2020)Karla Ruiz0% (1)
- 10.conclusiones y RecomendacionesDocumento2 páginas10.conclusiones y Recomendacioneskertesz25Aún no hay calificaciones
- Informe de Laboratorio Orgánica 1 Modelos MolecularesDocumento15 páginasInforme de Laboratorio Orgánica 1 Modelos MolecularesMaria Del Carmen100% (1)
- Circuitos Sintonizados Y Transformadores de Redes SelectivasDocumento5 páginasCircuitos Sintonizados Y Transformadores de Redes SelectivasBill Ordoñez EgoavilAún no hay calificaciones
- Apu ElectricasDocumento74 páginasApu ElectricasHerlin Luis Challco HuallpaAún no hay calificaciones
- v1 CI4040 Del Subassembly Composer Al CorredorDocumento18 páginasv1 CI4040 Del Subassembly Composer Al CorredorJoseph Humberto Gastelo Benavides0% (1)
- Manual Alumnos - Conectar IgualdadDocumento38 páginasManual Alumnos - Conectar IgualdadlisandrojavierAún no hay calificaciones
- IntroducciónDocumento6 páginasIntroducciónChristian OcampoAún no hay calificaciones
- Ley de Faraday - Lenz PDFDocumento2 páginasLey de Faraday - Lenz PDFJhon Jairo AnayaAún no hay calificaciones
- Nomenclatura QuímicaDocumento40 páginasNomenclatura QuímicaryrAún no hay calificaciones
- PodcastDocumento14 páginasPodcastWendy AscencioAún no hay calificaciones
- ElectricidadDocumento94 páginasElectricidadJose Fernando Saldias RuzAún no hay calificaciones
- ACTIVIDAD 2, MedidoresDocumento9 páginasACTIVIDAD 2, MedidoresRobert Gould100% (1)
- Marco Teorico QuedaDocumento15 páginasMarco Teorico QuedaMaycon Gomez UnacAún no hay calificaciones