También podría gustarte
- Tema 5 Momento de Inercia. Radio de Giro y Momento Resistente.Documento5 páginasTema 5 Momento de Inercia. Radio de Giro y Momento Resistente.Jakeline GomezAún no hay calificaciones
- Manual Caja de AhorroDocumento17 páginasManual Caja de AhorroLigia SantianaAún no hay calificaciones
- Momento de InerciaDocumento22 páginasMomento de InerciaAyrton Alvan Silva100% (1)
- Momento de Inerciaa 2Documento22 páginasMomento de Inerciaa 2Bryan Rodrigo Casimiro100% (1)
- Practica 5Documento12 páginasPractica 5JesusOswaldoHolguinFloresAún no hay calificaciones
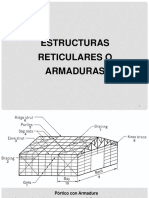
- Estructuras Reticulares o ArmadurasDocumento51 páginasEstructuras Reticulares o ArmadurasJ Rivera Alfaro100% (2)
- Secuenciacion NGSDocumento25 páginasSecuenciacion NGSPablo Emilio Sarmiento GonzálezAún no hay calificaciones
- Momentos de InerciaDocumento54 páginasMomentos de InerciaRonaldAlvaAún no hay calificaciones
- Unidad V Fuerzas Distribuidas Momento de InerciaDocumento38 páginasUnidad V Fuerzas Distribuidas Momento de InerciaValentinaAún no hay calificaciones
- Momento de InerciaDocumento20 páginasMomento de Inerciadavid acostaAún no hay calificaciones
- Momento de InerciaDocumento15 páginasMomento de InerciaLuis Tamayo FernándezAún no hay calificaciones
- Momento de InerciaDocumento32 páginasMomento de InerciaArroyoEstrellaAún no hay calificaciones
- Ejercicios ResueltosDocumento33 páginasEjercicios ResueltosGhersy BernardoAún no hay calificaciones
- Momentos de Inercia-EstáticaDocumento9 páginasMomentos de Inercia-Estáticajoel riosAún no hay calificaciones
- Estatica12 UCSMDocumento21 páginasEstatica12 UCSMRusbel ValdiviaAún no hay calificaciones
- 5sem MCR Momento InerciaDocumento45 páginas5sem MCR Momento InerciaJamil Martinez PachecoAún no hay calificaciones
- 12 y 13 - Momento de Inercia de Áreas y Teor SteinerDocumento46 páginas12 y 13 - Momento de Inercia de Áreas y Teor Steinersamuel.tapia1234567Aún no hay calificaciones
- Capitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Documento27 páginasCapitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Cley Ordoñez HernandezAún no hay calificaciones
- Segundo Momento o Momento de InerciaDocumento48 páginasSegundo Momento o Momento de InerciaJose Chingay NicolasAún no hay calificaciones
- Momento de InerciaDocumento35 páginasMomento de InerciaCris GQAún no hay calificaciones
- Clase 3 Estructuras Isostaticas Parcial 3Documento13 páginasClase 3 Estructuras Isostaticas Parcial 3BRYAN ALEXANDER CAIZA CHASIPANTAAún no hay calificaciones
- Resumen Capitulo 9Documento4 páginasResumen Capitulo 9Arlen MontielAún no hay calificaciones
- Sesion 12 Momento de InerciaDocumento37 páginasSesion 12 Momento de InerciaFidel Martin Hernandez LoveraAún no hay calificaciones
- Semana 7 (MR)Documento25 páginasSemana 7 (MR)Ramirez Quilcaro YefersonAún no hay calificaciones
- 13 - Momentos de Inercia - UCV 2021 IIDocumento27 páginas13 - Momentos de Inercia - UCV 2021 IInorvin cunya criolloAún no hay calificaciones
- Sesión 8 - Momento de Inercia GeométricoDocumento30 páginasSesión 8 - Momento de Inercia GeométricoLeonardo QuezadaAún no hay calificaciones
- Momentos Segundos de SuperficieDocumento7 páginasMomentos Segundos de SuperficieFranco Oblea ChavezAún no hay calificaciones
- Momento de InerciaDocumento35 páginasMomento de InerciaFERNANDO EDUARDO BENDEZU SAAVEDRAAún no hay calificaciones
- Tema 5Documento70 páginasTema 5Etzel Ed MejAún no hay calificaciones
- Taller Corte 2 IntegralDocumento1 páginaTaller Corte 2 IntegralJuan Pablo Rengifo RuizAún no hay calificaciones
- Caracteristicas Geometricas de Secciones PlanasDocumento3 páginasCaracteristicas Geometricas de Secciones PlanasJoe WalterAún no hay calificaciones
- Informe Final de Momento de Inercia de Areas Simples y CompuestasDocumento25 páginasInforme Final de Momento de Inercia de Areas Simples y CompuestasPIERO JESUSAún no hay calificaciones
- 5sem MCR Momento InerciaDocumento43 páginas5sem MCR Momento InerciaLaurente Huaman JoelAún no hay calificaciones
- 1.-Marco Teorico 1.1 Propiedades Geométricas de Las Figuras Planas 1.1.1. Área de Una SuperficieDocumento14 páginas1.-Marco Teorico 1.1 Propiedades Geométricas de Las Figuras Planas 1.1.1. Área de Una SuperficieJosé Apaza balceraAún no hay calificaciones
- Momento de InerciaDocumento23 páginasMomento de InerciaJONATAN ALEX LEIVA BAUTISTAAún no hay calificaciones
- Untitled 3Documento25 páginasUntitled 3Cesar Rumiche HernándezAún no hay calificaciones
- ExamenesDocumento90 páginasExamenesLUIS FERNANDO CHALCO RAMOSAún no hay calificaciones
- Fisica II - Choques Ejercicio 2rftDocumento22 páginasFisica II - Choques Ejercicio 2rftJuan Guerrero Bustamante100% (1)
- Clase de Teoría Nº2 Propiedades Geométricas de MasasDocumento25 páginasClase de Teoría Nº2 Propiedades Geométricas de MasasJuan Diego PerezAún no hay calificaciones
- Momentos de Segundo OrdenDocumento9 páginasMomentos de Segundo OrdenRoberth ChombopAún no hay calificaciones
- Rel3fisiigioi PDFDocumento4 páginasRel3fisiigioi PDFAbel LopezAún no hay calificaciones
- HT Semana 4 WaDocumento7 páginasHT Semana 4 WagonzalescagiAún no hay calificaciones
- Capítulo 6 Momentos de Inercia 1Documento17 páginasCapítulo 6 Momentos de Inercia 1Jeanpierre Mejia BocanegraAún no hay calificaciones
- 8ma Clase - Momentos de Inercia IIDocumento27 páginas8ma Clase - Momentos de Inercia IICARLOS MARTIN GODOY KASENGAún no hay calificaciones
- Momentos de Inercia PDFDocumento68 páginasMomentos de Inercia PDFJuan Krlos BernalAún no hay calificaciones
- Clase 06 y 07 CRES DF - CLASES - Momento de Inercia - E y RM - 05-10-2023Documento69 páginasClase 06 y 07 CRES DF - CLASES - Momento de Inercia - E y RM - 05-10-2023Sil BerardoAún no hay calificaciones
- Práctica Domiciliaria 2Documento5 páginasPráctica Domiciliaria 2Renzo Amiquero CrispinAún no hay calificaciones
- Práctica Domiciliaria 2 PDFDocumento5 páginasPráctica Domiciliaria 2 PDFSebastian AlarconAún no hay calificaciones
- Taller 3 2018 - VeranoDocumento5 páginasTaller 3 2018 - VeranoOSCO NEYRA LEIBNIZAún no hay calificaciones
- 1.2. EjerciciosDocumento5 páginas1.2. EjercicioscxbxzAún no hay calificaciones
- Fórmulas Mecánica Est C1Documento10 páginasFórmulas Mecánica Est C1Fabián Sánchez ParrinesAún no hay calificaciones
- Otras Aplicaciones de La Integral Definida2Documento2 páginasOtras Aplicaciones de La Integral Definida2jesusantonioveraflores1Aún no hay calificaciones
- Clase 10 Momento de InerciaDocumento30 páginasClase 10 Momento de InerciaSantiago Mosquera TobonAún no hay calificaciones
- Clalse 05 Fisicaii. EdDocumento21 páginasClalse 05 Fisicaii. EdjesusAún no hay calificaciones
- Informe EstaticaDocumento5 páginasInforme Estaticamariel dominguezAún no hay calificaciones
- 7 - Momento de InerciaDocumento10 páginas7 - Momento de InerciaRoy F. MillanAún no hay calificaciones
- CAPITULO 8 Momentos de InerciaDocumento48 páginasCAPITULO 8 Momentos de InerciaAlexanderSeaOrdaya100% (1)
- 2.8 Vol. Sólidos Revolución Método Del DiscoDocumento5 páginas2.8 Vol. Sólidos Revolución Método Del DiscoIngre MestanzaAún no hay calificaciones
- Interseccion de Dos Cilindros.Documento3 páginasInterseccion de Dos Cilindros.blinkg6337100% (2)
- Mecanica Aplicada ParejasDocumento16 páginasMecanica Aplicada ParejasLeonardo MassaroAún no hay calificaciones
- Cap 3Documento17 páginasCap 3Manuela PeñaAún no hay calificaciones
- Velocidad Del SonidoDocumento1 páginaVelocidad Del SonidoJ Rivera AlfaroAún no hay calificaciones
- Esfuerzos Por Superficies CargadasDocumento31 páginasEsfuerzos Por Superficies CargadasJ Rivera AlfaroAún no hay calificaciones
- Mathcad - EJEMPLO Vibraciones 2016-IDocumento20 páginasMathcad - EJEMPLO Vibraciones 2016-IJ Rivera AlfaroAún no hay calificaciones
- Diseño HidraulicoDocumento27 páginasDiseño HidraulicoPastrana Morales RijhaardAún no hay calificaciones
- Voltaje y Corriente en CA Parte IDocumento12 páginasVoltaje y Corriente en CA Parte IGUIDO MORA VITERIAún no hay calificaciones
- El Modelo de RamseyDocumento9 páginasEl Modelo de RamseyOSCAR JAVIER MARTINEZ HERRERAAún no hay calificaciones
- Practica #12 6.7.1Documento8 páginasPractica #12 6.7.1eljediAún no hay calificaciones
- Vibrado Hormigon 2 PDFDocumento2 páginasVibrado Hormigon 2 PDFCarlosChavezPonceAún no hay calificaciones
- Por Qué y Cómo Enseñar FraccionesDocumento7 páginasPor Qué y Cómo Enseñar FraccionesDirección de Educación QroAún no hay calificaciones
- Protocolo Práctica 6. Leyes de Los GasesDocumento3 páginasProtocolo Práctica 6. Leyes de Los GasesKali García RoldánAún no hay calificaciones
- Enlaces Satelitales-Parte 2Documento48 páginasEnlaces Satelitales-Parte 2Percy CarhuachucoAún no hay calificaciones
- Taller 4Documento6 páginasTaller 4Buine TFM100% (1)
- Electivo Fisica 1dejulio RetroalimentaciónGuíaEvaluadaDocumento12 páginasElectivo Fisica 1dejulio RetroalimentaciónGuíaEvaluadatemulentiaAún no hay calificaciones
- BasculaDocumento4 páginasBasculaFanny NajeraAún no hay calificaciones
- Control de Presión Diferencial - 0Documento1 páginaControl de Presión Diferencial - 0Ricardo AndradeAún no hay calificaciones
- Laboratorio 6 OrganometalurgiaDocumento2 páginasLaboratorio 6 OrganometalurgiaJose Carlos Guillen LauraAún no hay calificaciones
- Ejercicio de Diseño Metodo WalkerDocumento7 páginasEjercicio de Diseño Metodo Walkeryorley cunoAún no hay calificaciones
- Historia de Las Coordenadas UtmDocumento10 páginasHistoria de Las Coordenadas UtmGeanpierthMarceloAún no hay calificaciones
- 4 - Errores Sintácticos y Lógicos en CDocumento3 páginas4 - Errores Sintácticos y Lógicos en CMarcos Daniel Ruiz Diaz MendozaAún no hay calificaciones
- Fc3adsica Marcelo PioliDocumento5 páginasFc3adsica Marcelo PioliZul Ysminda Lorena QuispeAún no hay calificaciones
- Problemas Fluidos2 PDFDocumento2 páginasProblemas Fluidos2 PDFCharly HernandezAún no hay calificaciones
- Métodos de ClapeyronDocumento20 páginasMétodos de Clapeyronjavier andresAún no hay calificaciones
- Cuest 6Documento3 páginasCuest 6Mateo LudeñaAún no hay calificaciones
- Matematica 1 Sem 8Documento10 páginasMatematica 1 Sem 8Kevin RostaingAún no hay calificaciones
- Unidad 4 Ing. EconomicaDocumento27 páginasUnidad 4 Ing. EconomicaGerardoAlonsoSánchezAún no hay calificaciones
- Lazos de ExpansiónDocumento14 páginasLazos de ExpansiónJosé Luis Bermúdez CortezAún no hay calificaciones
- Área D Digitado (Claves)Documento36 páginasÁrea D Digitado (Claves)Sonia Luz Sanchez CarazasAún no hay calificaciones
- CAP-8 Analisis F HorizontalDocumento38 páginasCAP-8 Analisis F HorizontalEnzo MendozaAún no hay calificaciones
- Trabajo Teoría de TerzaghiDocumento6 páginasTrabajo Teoría de TerzaghiMeneses AngieAún no hay calificaciones
- OC Reporte LAB04 2020 1Documento7 páginasOC Reporte LAB04 2020 1jcaceresaleAún no hay calificaciones