También podría gustarte
- Sistema CíclicoDocumento2 páginasSistema Cíclicoximena carreroAún no hay calificaciones
- El Código Cósmico: Un Enigma Celeste Historia, Relatividad Y Agujeros Negros Partes Ii Y IiiDe EverandEl Código Cósmico: Un Enigma Celeste Historia, Relatividad Y Agujeros Negros Partes Ii Y IiiAún no hay calificaciones
- Voladura ControladaDocumento59 páginasVoladura ControladaLaurente Huaman JoelAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Momento de Inerciaa 2Documento22 páginasMomento de Inerciaa 2Bryan Rodrigo Casimiro100% (1)
- Plan de Clase 8 EGBDocumento63 páginasPlan de Clase 8 EGBramireis3577Aún no hay calificaciones
- Forma Cuadraticas - StewardDocumento12 páginasForma Cuadraticas - StewardLenin RojasAún no hay calificaciones
- k.-2 Dinamica de Suelos Como Medio Continuo.Documento27 páginask.-2 Dinamica de Suelos Como Medio Continuo.Jose Luis Triguero100% (1)
- Ejercicios ResueltosDocumento33 páginasEjercicios ResueltosGhersy BernardoAún no hay calificaciones
- 5sem MCR Momento InerciaDocumento45 páginas5sem MCR Momento InerciaJamil Martinez PachecoAún no hay calificaciones
- Tema 10 Momentos Segundos de Superficie y Momentos de Inercia - PpsDocumento36 páginasTema 10 Momentos Segundos de Superficie y Momentos de Inercia - PpsscarreonmeAún no hay calificaciones
- Momentos de Inercia PDFDocumento54 páginasMomentos de Inercia PDFJ Rivera AlfaroAún no hay calificaciones
- Tema 10 Momentos Segundos de Superficie y Momentos de InerciaDocumento36 páginasTema 10 Momentos Segundos de Superficie y Momentos de InerciaAsthy Jesús Molina CaguanaAún no hay calificaciones
- Momento de InerciaaDocumento24 páginasMomento de Inerciaakellym33% (3)
- Momento de InerciaDocumento32 páginasMomento de InerciaArroyoEstrellaAún no hay calificaciones
- 6sem Circulo MohrDocumento26 páginas6sem Circulo MohrDante MontañezAún no hay calificaciones
- Momentos de inercia de áreas planasDocumento20 páginasMomentos de inercia de áreas planasdavid acostaAún no hay calificaciones
- Mfel 1 - Problemas MfelDocumento40 páginasMfel 1 - Problemas MfelJordan YnfanteAún no hay calificaciones
- Momentos Segundos de SuperficieDocumento7 páginasMomentos Segundos de SuperficieFranco Oblea ChavezAún no hay calificaciones
- Momento de InerciaDocumento15 páginasMomento de InerciaLuis Tamayo FernándezAún no hay calificaciones
- Clase4 - Circulo de MohrDocumento65 páginasClase4 - Circulo de MohrAlonso Rivera CasillasAún no hay calificaciones
- Momento de Inercia - ClasesDocumento9 páginasMomento de Inercia - ClasesJL Valladares Mendoza100% (1)
- Momentos de InerciaDocumento54 páginasMomentos de InerciaRonaldAlvaAún no hay calificaciones
- Cam-Cilindros y Superficies CuádricasDocumento7 páginasCam-Cilindros y Superficies CuádricasNatalieAún no hay calificaciones
- Caracteristicas Geometricas de Secciones PlanasDocumento3 páginasCaracteristicas Geometricas de Secciones PlanasJoe WalterAún no hay calificaciones
- Momentos de inercia y resistencia estructuralDocumento38 páginasMomentos de inercia y resistencia estructuralValentinaAún no hay calificaciones
- Número Cuántico: Erwin Schrödinger Erwin SchrödingerDocumento19 páginasNúmero Cuántico: Erwin Schrödinger Erwin SchrödingerGato TruenoAún no hay calificaciones
- 12 y 13 - Momento de Inercia de Áreas y Teor SteinerDocumento46 páginas12 y 13 - Momento de Inercia de Áreas y Teor Steinersamuel.tapia1234567Aún no hay calificaciones
- Momentos de Inercia 1 - TeoriaDocumento51 páginasMomentos de Inercia 1 - TeoriaLennin CaruanamboAún no hay calificaciones
- Prueba 2021-22 02Documento2 páginasPrueba 2021-22 02vamos.nano.14Aún no hay calificaciones
- LABORATORIO VIRTUAL MOVIMIENTO DE UNA PARTÍCULA CARGADADocumento6 páginasLABORATORIO VIRTUAL MOVIMIENTO DE UNA PARTÍCULA CARGADApercyAún no hay calificaciones
- Desarrollo Cilindro ParabólicoDocumento7 páginasDesarrollo Cilindro ParabólicoFacundoAún no hay calificaciones
- Capitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Documento27 páginasCapitulo VIII - Texto Mecanica de Solidos I-Setiembre 2012Cley Ordoñez HernandezAún no hay calificaciones
- Fractura - Tema 3 - ProblemasDocumento50 páginasFractura - Tema 3 - Problemasjames williams Goycochea ZamoraAún no hay calificaciones
- Flexion y CorteDocumento16 páginasFlexion y CorteMiguel Angel Anarata TocoAún no hay calificaciones
- 31 Relación Entre La Astronomía y La GeodesiaDocumento9 páginas31 Relación Entre La Astronomía y La GeodesiaNicolas GutierrezAún no hay calificaciones
- HT Semana 4 WaDocumento7 páginasHT Semana 4 WagonzalescagiAún no hay calificaciones
- LF-003 Modulo de YoungDocumento6 páginasLF-003 Modulo de YoungANGEL JULIAN CHAMBI TALAVERAAún no hay calificaciones
- Momento-De-Inercia (Word)Documento14 páginasMomento-De-Inercia (Word)Rosa Lizana100% (4)
- 1590435940Documento30 páginas1590435940Lunita Thommy0% (1)
- Momentos de inercia fuerzas distribuidasDocumento4 páginasMomentos de inercia fuerzas distribuidasArlen MontielAún no hay calificaciones
- Sesión 09Documento42 páginasSesión 09nixon marin vasquezAún no hay calificaciones
- Examen Sem I 2014Documento11 páginasExamen Sem I 2014Natalia SepúlvedaAún no hay calificaciones
- 8ma Clase - Momentos de Inercia IDocumento26 páginas8ma Clase - Momentos de Inercia ICARLOS MARTIN GODOY KASENGAún no hay calificaciones
- Segundo Momento o Momento de InerciaDocumento48 páginasSegundo Momento o Momento de InerciaJose Chingay NicolasAún no hay calificaciones
- Sesion Presencial 1.2Documento26 páginasSesion Presencial 1.2Jimmy Jonathan Chacon MaynitaAún no hay calificaciones
- Examen de Análisis Vectorial y TensorialDocumento1 páginaExamen de Análisis Vectorial y TensorialHashley Cisneros GonzalesAún no hay calificaciones
- Ecuación 2o Grado 3 VariablesDocumento21 páginasEcuación 2o Grado 3 Variablesjuan martín lavalleAún no hay calificaciones
- Fórmulas Mecánica Est C1Documento10 páginasFórmulas Mecánica Est C1Fabián Sánchez ParrinesAún no hay calificaciones
- Interseccion de Dos Cilindros.Documento3 páginasInterseccion de Dos Cilindros.blinkg6337100% (2)
- Momento de Inercia en Aéreas Conocidas y Aéreas CompuestasDocumento14 páginasMomento de Inercia en Aéreas Conocidas y Aéreas CompuestasRocio Coila VilcaAún no hay calificaciones
- Practica No.1Documento2 páginasPractica No.1Christian Almanza ArratiaAún no hay calificaciones
- HIDROSTATICADocumento17 páginasHIDROSTATICAJoe CNAún no hay calificaciones
- Viga - Flexo-Torsión Estabilidad 2Documento13 páginasViga - Flexo-Torsión Estabilidad 2Felix MarichalarAún no hay calificaciones
- P2FC2019 2 PDFDocumento3 páginasP2FC2019 2 PDFJUAN DAVID TAMAYO MONTOYAAún no hay calificaciones
- Capitulo VI Ondas en Dos y Tres Dimensiones y VII Introducción Al Análisis de Fourier de Pulsos y Señales PDFDocumento46 páginasCapitulo VI Ondas en Dos y Tres Dimensiones y VII Introducción Al Análisis de Fourier de Pulsos y Señales PDFMario Alberto Ayala0% (2)
- Momentos de inercia y cálculo de áreasDocumento35 páginasMomentos de inercia y cálculo de áreasCris GQAún no hay calificaciones
- Momentos y Producto de InerciaDocumento16 páginasMomentos y Producto de InerciaSteven Ludeña GavinoAún no hay calificaciones
- 12sem MCR RozamientoDocumento32 páginas12sem MCR RozamientoLaurente Huaman JoelAún no hay calificaciones
- Syllabus Fisico QuimicaDocumento4 páginasSyllabus Fisico QuimicaChristian Aliaga MejíaAún no hay calificaciones
- 9sem MCR Vigas AlumnoDocumento25 páginas9sem MCR Vigas AlumnocarlosAún no hay calificaciones
- 9sem MCR Vigas AlumnoDocumento25 páginas9sem MCR Vigas AlumnocarlosAún no hay calificaciones
- Museo de PaleontologiaDocumento2 páginasMuseo de PaleontologiaLaurente Huaman JoelAún no hay calificaciones
- 14sem MCR Trabajo VirtualDocumento27 páginas14sem MCR Trabajo VirtualLaurente Huaman JoelAún no hay calificaciones
- Equilibrio de FuerzasDocumento36 páginasEquilibrio de FuerzasLaurente Huaman JoelAún no hay calificaciones
- 12sem MCR RozamientoDocumento32 páginas12sem MCR RozamientoLaurente Huaman JoelAún no hay calificaciones
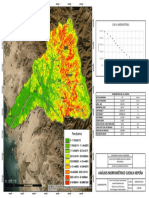
- Analisis Morfométrico NepeñaDocumento1 páginaAnalisis Morfométrico NepeñaLaurente Huaman JoelAún no hay calificaciones
- Teorico 9Documento23 páginasTeorico 9William AcAún no hay calificaciones
- Centro GravedadDocumento20 páginasCentro GravedadLaurente Huaman JoelAún no hay calificaciones
- Equilibrio de FuerzasDocumento36 páginasEquilibrio de FuerzasLaurente Huaman JoelAún no hay calificaciones
- Centro GravedadDocumento20 páginasCentro GravedadLaurente Huaman JoelAún no hay calificaciones
- 9sem MCR Vigas AlumnoDocumento25 páginas9sem MCR Vigas AlumnocarlosAún no hay calificaciones
- Formato de Artículo-Revista IllariDocumento5 páginasFormato de Artículo-Revista IllariAdalberto Hancco Cordova100% (1)
- Final Mecanica Del Cuerpo RigidoDocumento2 páginasFinal Mecanica Del Cuerpo RigidoLaurente Huaman Joel0% (1)
- Antropologia y DesarrolloDocumento8 páginasAntropologia y DesarrolloLaurente Huaman JoelAún no hay calificaciones
- 2sem MCR Equilibrio PDFDocumento30 páginas2sem MCR Equilibrio PDFLaurente Huaman JoelAún no hay calificaciones
- GuiaDocumento5 páginasGuiaWendy Vanessa VelasquezAún no hay calificaciones
- Actividades para La MemoriaDocumento1 páginaActividades para La MemoriaLaurente Huaman JoelAún no hay calificaciones
- Informe 2 Qui-IiDocumento14 páginasInforme 2 Qui-IiMilagros BacaAún no hay calificaciones
- Velocidad y Aceleracion InstantaneaDocumento10 páginasVelocidad y Aceleracion InstantaneaLaurente Huaman JoelAún no hay calificaciones
- Investigacion CualitativaDocumento0 páginasInvestigacion CualitativaMarco Antonio Morales LópezAún no hay calificaciones
- Investigacion CualitativaDocumento6 páginasInvestigacion CualitativamuscarforteAún no hay calificaciones
- Boletin Estadistico Mineria - Estamin Diciembre 2016Documento74 páginasBoletin Estadistico Mineria - Estamin Diciembre 2016Laurente Huaman JoelAún no hay calificaciones
- Tema 18 GG Movimientos Sismicos PDFDocumento64 páginasTema 18 GG Movimientos Sismicos PDFLaurente Huaman Joel100% (1)
- Diseño, Método y Estructura PDFDocumento4 páginasDiseño, Método y Estructura PDFLaurente Huaman JoelAún no hay calificaciones
- Factor Seguridad en CuñasDocumento17 páginasFactor Seguridad en CuñasLaurente Huaman Joel100% (1)
- Tarea 4 TrigonometriaDocumento11 páginasTarea 4 TrigonometriaAdriana RamírezAún no hay calificaciones
- Ficha Didáctica - Proyecto Integrador - Sexto Grado, MarzoDocumento44 páginasFicha Didáctica - Proyecto Integrador - Sexto Grado, MarzoLuis Torres100% (1)
- Trabajo Final Investigacion - Calculo 2Documento17 páginasTrabajo Final Investigacion - Calculo 2angelyAún no hay calificaciones
- Geometria Semana 01 24Documento6 páginasGeometria Semana 01 24Anthony yhohan Calcina Condori 3CAún no hay calificaciones
- Problemas Semana 5Documento11 páginasProblemas Semana 5Jaime Luis Velasquez Chicana100% (1)
- Deber 4 CVDocumento3 páginasDeber 4 CVDiego TipanAún no hay calificaciones
- Perimetro y Areas de PoligonosDocumento2 páginasPerimetro y Areas de PoligonosGermanEduardoVaronAún no hay calificaciones
- Levantamiento topográfico de una poligonal cerrada de 5 vérticesDocumento5 páginasLevantamiento topográfico de una poligonal cerrada de 5 vérticesElias BarraganAún no hay calificaciones
- Visibilidad Vistas DirigidasDocumento1 páginaVisibilidad Vistas DirigidasEdward Steven Mancilla ValeroAún no hay calificaciones
- Analisis Grafico2Documento12 páginasAnalisis Grafico2Max RojasAún no hay calificaciones
- Matemática TrigonometríaDocumento76 páginasMatemática TrigonometríacerbalzackguzmanAún no hay calificaciones
- Problemas de Aplicacion de La DerivadaDocumento32 páginasProblemas de Aplicacion de La DerivadaFreddy GuzmanAún no hay calificaciones
- Resolución de Problemas Algebraicos PDFDocumento336 páginasResolución de Problemas Algebraicos PDFOmsa OmsaAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Ciencias Basicas - Virtual - Cálculo 3 - (Grupo b01)Documento6 páginasActividad de Puntos Evaluables - Escenario 2 - Segundo Bloque-Ciencias Basicas - Virtual - Cálculo 3 - (Grupo b01)Daniela RodriguezAún no hay calificaciones
- Prueba Diagnostica Grado QuintoDocumento2 páginasPrueba Diagnostica Grado QuintoKely Alejandra Lasso CastilloAún no hay calificaciones
- Intersección Mutua de CuerposDocumento6 páginasIntersección Mutua de CuerposGabriel BermúdezAún no hay calificaciones
- Guia de Geometria Puntos Notables Del TrianguloDocumento12 páginasGuia de Geometria Puntos Notables Del Triangulojaime gomez mAún no hay calificaciones
- Maloca Ii Sexto Matemáticas Julio25Documento3 páginasMaloca Ii Sexto Matemáticas Julio25LISBETH VIVIANA MARINAún no hay calificaciones
- Teorema de StokesDocumento16 páginasTeorema de StokeshugoAún no hay calificaciones
- Registro IvDocumento20 páginasRegistro IvMARGARITA ELIZABETH FLORES ROSELLÓAún no hay calificaciones
- Cepre Uni 2019 I Trigonometria 01Documento47 páginasCepre Uni 2019 I Trigonometria 01Ado Valle100% (2)
- Propuestas Didácticas para El Estudio de La Geometría: en Segundo CicloDocumento17 páginasPropuestas Didácticas para El Estudio de La Geometría: en Segundo CicloValeria LarocaAún no hay calificaciones
- I .E.P Alfa: Poligono IiDocumento6 páginasI .E.P Alfa: Poligono IiFray Royer QJAún no hay calificaciones
- Guia Pedagogica Matematica 4to. Año III MomentoDocumento24 páginasGuia Pedagogica Matematica 4to. Año III MomentoDanyeli MedinaAún no hay calificaciones
- PDF 1Documento5 páginasPDF 1MIGUEL ANGEL TIQUE LAGUNAAún no hay calificaciones
- Entornos de 1875. Exposicion Fundamento de MatematicasDocumento3 páginasEntornos de 1875. Exposicion Fundamento de MatematicasFrancisco DiazAún no hay calificaciones
- Practica de Cinematica 2 - 2022Documento6 páginasPractica de Cinematica 2 - 2022Jairo Jesus Flores PereyraAún no hay calificaciones
- M R U VDocumento6 páginasM R U VNayla BetancourtAún no hay calificaciones