También podría gustarte
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Presentación PLCDocumento53 páginasPresentación PLCFranz G. Callisaya PacoAún no hay calificaciones
- 4.1 Introduccion A Los PLCsDocumento28 páginas4.1 Introduccion A Los PLCsIrvinJosueVillasecaCastilloAún no hay calificaciones
- Fundamentos Del PLCDocumento21 páginasFundamentos Del PLCmiguelpiamonteAún no hay calificaciones
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Calificación: 3 de 5 estrellas3/5 (1)
- Manual de Usuario ODK Collect 5-10-15Documento27 páginasManual de Usuario ODK Collect 5-10-15ERICK CHICONCULLOAún no hay calificaciones
- Curso Control Secuencial PLCDocumento139 páginasCurso Control Secuencial PLCLogtown EasthAún no hay calificaciones
- Proyección PLCDocumento46 páginasProyección PLCAlex Serna RestrepoAún no hay calificaciones
- Manual PLC Báico Siemens-ParticipanteDocumento18 páginasManual PLC Báico Siemens-ParticipanteJose MirelesAún no hay calificaciones
- PLCDocumento20 páginasPLCandrewww07100% (14)
- PLC Basico-Parte1 - Control+Documento65 páginasPLC Basico-Parte1 - Control+miguel sanjinezAún no hay calificaciones
- S04 - PLC - IDocumento36 páginasS04 - PLC - ILuis Alfredo Graus NeciosupAún no hay calificaciones
- Controlador Lógico Programable (PLC) : WWW - Inacap.ClDocumento11 páginasControlador Lógico Programable (PLC) : WWW - Inacap.ClSabrina JeriaAún no hay calificaciones
- Controles Logicos Programables PLCDocumento9 páginasControles Logicos Programables PLCGarcia JairoAún no hay calificaciones
- Cap1 BDocumento14 páginasCap1 BLuis MamaniAún no hay calificaciones
- Fundamentos y Caracteristicas de PLC SIEMENSDocumento64 páginasFundamentos y Caracteristicas de PLC SIEMENSKevin Dario Noriega VieraAún no hay calificaciones
- Controlador Lógico Programable.Documento27 páginasControlador Lógico Programable.elvisjuniorquispechoque1108Aún no hay calificaciones
- Universidad TécnicaDocumento9 páginasUniversidad TécnicaAndre TigreroAún no hay calificaciones
- Controladores Logicos ProgramablesDocumento40 páginasControladores Logicos ProgramablesOmar Alarcon GuevaraAún no hay calificaciones
- Taller PLCSDocumento43 páginasTaller PLCSJose Luis Sovero AstoamanAún no hay calificaciones
- T1.2 El Controlador Lógico Programable (PLC)Documento46 páginasT1.2 El Controlador Lógico Programable (PLC)Dick reyesAún no hay calificaciones
- Controladores Lógicos Programables (I) : 1.1. IntroducciónDocumento19 páginasControladores Lógicos Programables (I) : 1.1. IntroducciónJose TomassettiAún no hay calificaciones
- PLCDocumento26 páginasPLCWalter ZurbrigkAún no hay calificaciones
- Presentación PLCDocumento53 páginasPresentación PLCALEXANDER PAUL LIQUINCHANA MARTINEZAún no hay calificaciones
- Controladores Michelle BenavidesDocumento17 páginasControladores Michelle Benavidesanon_232847364Aún no hay calificaciones
- PLC Cap1Documento13 páginasPLC Cap1Genesis Toledo100% (1)
- PLC y SensoresDocumento26 páginasPLC y SensoresAlvaroAún no hay calificaciones
- IEE244 Guia 4Documento24 páginasIEE244 Guia 4Mario JTAún no hay calificaciones
- Presentación PLCDocumento51 páginasPresentación PLCAlejandro Gonzalez VazquezAún no hay calificaciones
- Automatizacion InformeDocumento9 páginasAutomatizacion InformebrayanAún no hay calificaciones
- Documento PLC CLASE1Documento23 páginasDocumento PLC CLASE1Stiven Perez KnoAún no hay calificaciones
- PLC)Documento16 páginasPLC)Jorgeluis Qpz100% (2)
- PLCDocumento64 páginasPLCSebastian MartinezAún no hay calificaciones
- Caracteristicas Generales de Los PLC Febrero 2021Documento14 páginasCaracteristicas Generales de Los PLC Febrero 2021RAULAún no hay calificaciones
- Lab 1 PLC Primera ParteDocumento14 páginasLab 1 PLC Primera ParteRicardo HernandezAún no hay calificaciones
- Memoria InternaDocumento5 páginasMemoria InternaJuan Reyes CaballeroAún no hay calificaciones
- Trabajo PLCDocumento6 páginasTrabajo PLCalexjx65Aún no hay calificaciones
- Elt-279 Tema 7 Introduccion A Los PLCDocumento32 páginasElt-279 Tema 7 Introduccion A Los PLCLuis Yucra Pizarro LuisAún no hay calificaciones
- Controladores Logicos Programables PLCDocumento20 páginasControladores Logicos Programables PLCTejidos MinervaAún no hay calificaciones
- Progama Nacional de Formación de Electricidad (PNFE) Unidad Curricular: Taller de Tecnología Eléctrica Iii T3-ELEC - 1MDocumento15 páginasProgama Nacional de Formación de Electricidad (PNFE) Unidad Curricular: Taller de Tecnología Eléctrica Iii T3-ELEC - 1MLuis Ernesto Leal100% (1)
- Au 9852842649 MoDocumento215 páginasAu 9852842649 MoAndrea CizAún no hay calificaciones
- PLCDocumento5 páginasPLCAlejandro VargasAún no hay calificaciones
- Evaluacion de ConocimeintosDocumento3 páginasEvaluacion de ConocimeintosDaniel ArgumedoAún no hay calificaciones
- Wikipedia: Desarrollo (Es Necesario?)Documento11 páginasWikipedia: Desarrollo (Es Necesario?)karen100% (1)
- Controladores Lógicos ProgramablesDocumento19 páginasControladores Lógicos ProgramablesJem Becquer Villena JamancaAún no hay calificaciones
- DOcumento Resumen Controladores Logicos ProgramablesDocumento37 páginasDOcumento Resumen Controladores Logicos ProgramablesDaniel Alonso CarrilloAún no hay calificaciones
- Sesión 14 Al 15 - Componentes Electroneumáticos Controlados Por PLCDocumento27 páginasSesión 14 Al 15 - Componentes Electroneumáticos Controlados Por PLCElizabeth Cristina Ortiz HanccoAún no hay calificaciones
- Automatismo Programable Por PLCDocumento224 páginasAutomatismo Programable Por PLCJorge Alvarez HuamánAún no hay calificaciones
- ACTIVIDAD N°1 AUTOMATIZACION LL (Resuelto)Documento4 páginasACTIVIDAD N°1 AUTOMATIZACION LL (Resuelto)Jainer Antonio Cera MercadoAún no hay calificaciones
- ActividadnAA2 37651367f744c2aDocumento3 páginasActividadnAA2 37651367f744c2aAlejandra RomeroAún no hay calificaciones
- Desarrollo PLC SDocumento22 páginasDesarrollo PLC SJuuaanchoo CnnzAún no hay calificaciones
- Automatas Programables Industriales-API PLC (1° Clase de Práctica)Documento39 páginasAutomatas Programables Industriales-API PLC (1° Clase de Práctica)nathan_allgrenAún no hay calificaciones
- Previo Practica 9 PLCDocumento6 páginasPrevio Practica 9 PLCOmar Asr AlejandroAún no hay calificaciones
- Presentacion de PLCDocumento45 páginasPresentacion de PLCVicktor PachecoAún no hay calificaciones
- ANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoDocumento23 páginasANTECEDENTES E HISTORIA DE LOS CONTROLADORES LÓGICOS PROGRAMABLES NuevoeferAún no hay calificaciones
- Unidad 6 Controles ElectricosDocumento14 páginasUnidad 6 Controles ElectricosBraYan Lagunas ToLedoAún no hay calificaciones
- 1 Teoria PLCDocumento51 páginas1 Teoria PLCLuis Fernando Pariona MartinezAún no hay calificaciones
- Exposicion Del PLCDocumento8 páginasExposicion Del PLCGianny0% (1)
- Controladores Logicos Programables (PLC) PDFDocumento27 páginasControladores Logicos Programables (PLC) PDFjeisonAún no hay calificaciones
- Control Lógico Programable (PLC)Documento8 páginasControl Lógico Programable (PLC)joseph garciaAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
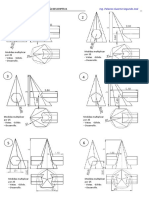
- Piramide PrismaDocumento4 páginasPiramide PrismaRuyeri Alex Narro ReynaAún no hay calificaciones
- ALGORITMOS2020Documento34 páginasALGORITMOS2020Ruyeri Alex Narro ReynaAún no hay calificaciones
- Clase AutomatasDocumento50 páginasClase AutomatasRuyeri Alex Narro ReynaAún no hay calificaciones
- Cap 17 QuimicaDocumento23 páginasCap 17 QuimicaRuyeri Alex Narro ReynaAún no hay calificaciones
- Sistemas Operativos 1 Unidad 2 Procesos e HilosDocumento28 páginasSistemas Operativos 1 Unidad 2 Procesos e HilosRuyeri Alex Narro Reyna100% (1)
- 646 4-R175dDocumento35 páginas646 4-R175dRuyeri Alex Narro ReynaAún no hay calificaciones
- Ácidos y BasesDocumento39 páginasÁcidos y BasesRuyeri Alex Narro ReynaAún no hay calificaciones
- 02 - Presentación TIA PortalDocumento20 páginas02 - Presentación TIA PortalRuyeri Alex Narro ReynaAún no hay calificaciones
- Plantilla Informe Investigación FormativaDocumento15 páginasPlantilla Informe Investigación FormativaRuyeri Alex Narro ReynaAún no hay calificaciones
- Teoria de Krinberg MerchantDocumento207 páginasTeoria de Krinberg MerchantRuyeri Alex Narro Reyna100% (1)
- 3-MAG-Tecnicas Operativas PDFDocumento32 páginas3-MAG-Tecnicas Operativas PDFRuyeri Alex Narro ReynaAún no hay calificaciones
- Daewo Modelo de Televisión JoelDocumento3 páginasDaewo Modelo de Televisión JoelJoel Chauran GuevaraAún no hay calificaciones
- Informe PreamplificadorDocumento26 páginasInforme PreamplificadorNico SuAún no hay calificaciones
- Taller Electronica 3Documento10 páginasTaller Electronica 3Dandy ChavezAún no hay calificaciones
- RectificacionDocumento1 páginaRectificacionjesusAún no hay calificaciones
- La Computadora Hoy en Dia Se Ha Vuelto Una Herramienta Indispensable en Muchas AreasDocumento5 páginasLa Computadora Hoy en Dia Se Ha Vuelto Una Herramienta Indispensable en Muchas AreasOmar AboujokhAún no hay calificaciones
- Como Reparar BocinasDocumento11 páginasComo Reparar BocinasArguetaManuelAún no hay calificaciones
- Informe Final 4Documento2 páginasInforme Final 4Erick Valeriano MuñozAún no hay calificaciones
- Manual Telefono Seguridad AntichispaDocumento8 páginasManual Telefono Seguridad AntichispaKarina RiveraAún no hay calificaciones
- Manual Booq Avant EsDocumento52 páginasManual Booq Avant EsNuria PinillaAún no hay calificaciones
- Red GPONDocumento14 páginasRed GPONOscar PerezAún no hay calificaciones
- Sistema Operativo Irene!!!!Documento3 páginasSistema Operativo Irene!!!!dayana6espinosaAún no hay calificaciones
- Adaptación AudífonosDocumento18 páginasAdaptación AudífonosValentina TreceAún no hay calificaciones
- Contador de Pulsos de Encoder Con ArduinoDocumento4 páginasContador de Pulsos de Encoder Con ArduinoPablo Quiroz TorresAún no hay calificaciones
- 4.6.6-Lab - KATHERYN ROJAS PDFDocumento4 páginas4.6.6-Lab - KATHERYN ROJAS PDFbriggyd rojasAún no hay calificaciones
- Ensayo DE CBADocumento10 páginasEnsayo DE CBANelly Cerna RiosAún no hay calificaciones
- AporteDocumento7 páginasAporteJUAN SEBASTIAN RUIZ SUAREZAún no hay calificaciones
- Etapa 3 de RobóticaDocumento20 páginasEtapa 3 de RobóticaAlberto AlvarezAún no hay calificaciones
- Examen de Mantenimiento de Pc3Documento5 páginasExamen de Mantenimiento de Pc3Pelaez Kevin HugoAún no hay calificaciones
- Tarea 1 Paso 4Documento4 páginasTarea 1 Paso 4Fernando EstradaAún no hay calificaciones
- Trabajo Video BeamDocumento20 páginasTrabajo Video BeamCata EnlacesAún no hay calificaciones
- Pets-Ant-Man-02 Mantenimiento Sub Estaciones MinaDocumento3 páginasPets-Ant-Man-02 Mantenimiento Sub Estaciones MinaJersonAún no hay calificaciones
- Sony KDL-40BX425 No EnciendeDocumento28 páginasSony KDL-40BX425 No EnciendeSergio TarcayaAún no hay calificaciones
- 8085Documento3 páginas8085teteAún no hay calificaciones
- Unidad 4 - Sintesis de Circuitos CombinacionalesDocumento49 páginasUnidad 4 - Sintesis de Circuitos CombinacionalesLeandro SchenoneAún no hay calificaciones
- Unidad1.Fundamentos de Programación Industrial. Diapositivas PDFDocumento33 páginasUnidad1.Fundamentos de Programación Industrial. Diapositivas PDFJorge Carrascal GarcíaAún no hay calificaciones
- InfoPLC Net 1 Intro AutomatasDocumento34 páginasInfoPLC Net 1 Intro AutomatasKarlitos Garamendi MartinezAún no hay calificaciones
- Herramientas Del Robotico PDFDocumento142 páginasHerramientas Del Robotico PDFJohnny Romero MiliánAún no hay calificaciones
- Toshiba P55-B5181SMDocumento3 páginasToshiba P55-B5181SMCristianChavezAún no hay calificaciones
- Circuitos Combinatorios ModularesDocumento19 páginasCircuitos Combinatorios ModularesNicolas CastilloAún no hay calificaciones