También podría gustarte
- 5 Rectas PlanosDocumento6 páginas5 Rectas PlanosHenry Lazaro CanoAún no hay calificaciones
- Clase Sobre PlanosDocumento8 páginasClase Sobre PlanosCristhian GomezAún no hay calificaciones
- Planos 2023-1Documento26 páginasPlanos 2023-1Santillan Crisante Diogo GabrielAún no hay calificaciones
- Cónicas (Vectorial)Documento37 páginasCónicas (Vectorial)catov781Aún no hay calificaciones
- El Plano EuclideanoDocumento45 páginasEl Plano EuclideanoDeyvi La Rosa OrtegaAún no hay calificaciones
- Rectas y PlanosDocumento5 páginasRectas y PlanosAgustínAún no hay calificaciones
- Geometría AnalíticaDocumento8 páginasGeometría AnalíticaMohammed BenabdelkaderAún no hay calificaciones
- Teorema de La StokesDocumento4 páginasTeorema de La StokesKathy ZottaAún no hay calificaciones
- E.D.P. de Primer Orden y Método de CaracterísticasDocumento27 páginasE.D.P. de Primer Orden y Método de CaracterísticasEze de la HozAún no hay calificaciones
- Mat1102c Tema1-2Documento15 páginasMat1102c Tema1-2Emilda GutiérrezVegaAún no hay calificaciones
- ECUACIÓN GENERAL Y VECTORIAL DE LA PARÁBOLA 1 Sin FondoDocumento23 páginasECUACIÓN GENERAL Y VECTORIAL DE LA PARÁBOLA 1 Sin FondoRafael OsorioAún no hay calificaciones
- 9° Sesión Geo B 22-07-2022Documento9 páginas9° Sesión Geo B 22-07-2022Angelo AlbujarAún no hay calificaciones
- Planos en El Espacio - (I) - 21-BDocumento6 páginasPlanos en El Espacio - (I) - 21-BSonja HarrisonAún no hay calificaciones
- TP5 PlanoYRectaEnElEspacioDocumento8 páginasTP5 PlanoYRectaEnElEspacioAbril Pereira MaldonadoAún no hay calificaciones
- Ejercicios A - Natalia RamirezDocumento9 páginasEjercicios A - Natalia RamirezandresAún no hay calificaciones
- Teoria y Problemas de Rectas y Planos Ccesa007Documento31 páginasTeoria y Problemas de Rectas y Planos Ccesa007Demetrio Ccesa RaymeAún no hay calificaciones
- Tarea 3 Geometria AnaliticaDocumento8 páginasTarea 3 Geometria AnaliticaVíctor EGAún no hay calificaciones
- Practica Dirigida N°9 PDFDocumento11 páginasPractica Dirigida N°9 PDFAlejandro Zapata LaimeAún no hay calificaciones
- Practica Dirigida N°9 PDFDocumento11 páginasPractica Dirigida N°9 PDFAlejandro Zapata LaimeAún no hay calificaciones
- El Plano EuclidianoDocumento27 páginasEl Plano EuclidianoChristopper Vasquez CrispinAún no hay calificaciones
- 121 Tarea2Documento23 páginas121 Tarea2yordy javier saavedra castañedaAún no hay calificaciones
- Unidad I CV - Planos y RectasDocumento11 páginasUnidad I CV - Planos y RectasRey Esteban MisterioAún no hay calificaciones
- Unidad 5Documento19 páginasUnidad 5penad2931Aún no hay calificaciones
- S13.s1 - MaterialDocumento17 páginasS13.s1 - MaterialJosé ParéAún no hay calificaciones
- Derivada Implícita, Plano Tangente, Aproximación LinealDocumento16 páginasDerivada Implícita, Plano Tangente, Aproximación LinealDaniela VargasAún no hay calificaciones
- 6° Ecuaciones Paramètricas y Transformación de CoordenadasDocumento121 páginas6° Ecuaciones Paramètricas y Transformación de CoordenadasAngelo AlbujarAún no hay calificaciones
- Análisis VectoriaL PARTE I - 2023Documento35 páginasAnálisis VectoriaL PARTE I - 2023Jory Joaquin Condori mantariAún no hay calificaciones
- Parcial - Resumen Matemático CGV PDFDocumento4 páginasParcial - Resumen Matemático CGV PDFStephanie AzorsaAún no hay calificaciones
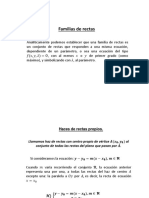
- Haces de RectasDocumento8 páginasHaces de RectasMIGUEL NICOLAS GONNET BARIDONAún no hay calificaciones
- Integrales MultiplesDocumento13 páginasIntegrales MultiplesFlorSotoAún no hay calificaciones
- Teorema de GaussDocumento3 páginasTeorema de GaussAdrian Salazar Padilla100% (1)
- Semana 11 Variable ComplejaDocumento11 páginasSemana 11 Variable ComplejaRolly Steven Cadillo PomaAún no hay calificaciones
- Solucion ExamenDocumento9 páginasSolucion ExamenCristopher Jaramillo100% (1)
- CV PD 03 SolucionarioDocumento9 páginasCV PD 03 SolucionarioBRIGITTE BERNAL BELISARIOAún no hay calificaciones
- Clase 3 de Cálculo III PDFDocumento51 páginasClase 3 de Cálculo III PDFANGELA MARIA ORTEGA VALERAAún no hay calificaciones
- Informe Del Teorema de Stokes 2018Documento5 páginasInforme Del Teorema de Stokes 2018Klissman AlvaradoAún no hay calificaciones
- Apunte Resumen3er ParcialDocumento5 páginasApunte Resumen3er ParcialJoaquín PicardoAún no hay calificaciones
- APENDICEDocumento10 páginasAPENDICEVictor JeronimoAún no hay calificaciones
- Guia Rectas Tangentes Horizontales y VerticalesDocumento5 páginasGuia Rectas Tangentes Horizontales y VerticalesAlexander Ardila MoraAún no hay calificaciones
- Ronald Mate Aplicada TrabajoDocumento9 páginasRonald Mate Aplicada TrabajoJhon Cordova AlvaradoAún no hay calificaciones
- Semana 02Documento25 páginasSemana 02aguilarbardalesjobAún no hay calificaciones
- Calculo Avanzado 2 Parcial Completo CompressDocumento31 páginasCalculo Avanzado 2 Parcial Completo CompressGiuliano KuhnAún no hay calificaciones
- Sem 02 PPT Rectas y Planos en r3Documento32 páginasSem 02 PPT Rectas y Planos en r3malcommm100% (2)
- CastroDocumento6 páginasCastroAnonymous vyrT8GdsfAún no hay calificaciones
- Semana 02Documento25 páginasSemana 02Wilmer Alberto Amambal ZambranoAún no hay calificaciones
- Superficies ParametrizadasDocumento16 páginasSuperficies ParametrizadasReben PerezAún no hay calificaciones
- Pregunta 5 - Parcial - BalotarioaDocumento3 páginasPregunta 5 - Parcial - BalotarioaSebastián Arica VidalAún no hay calificaciones
- MatemáticaDocumento6 páginasMatemáticaMeliza ArguelloAún no hay calificaciones
- Álgebra y Geometría AnalíticaDocumento3 páginasÁlgebra y Geometría AnalíticafabiolaAún no hay calificaciones
- Semana - 8 - Transformaciones LinealesDocumento36 páginasSemana - 8 - Transformaciones LinealesDyllan BastidasAún no hay calificaciones
- Ejercicio de ParábolaDocumento4 páginasEjercicio de ParábolaMarrcos ArmisAún no hay calificaciones
- 2 - Teoremas Sobre Funciones DerivablesDocumento6 páginas2 - Teoremas Sobre Funciones DerivablesPenguin FilialAún no hay calificaciones
- Apmat p2Documento11 páginasApmat p2Ramón Flores RodríguezAún no hay calificaciones
- Semana 2-CALC 3 - 2020-2Documento18 páginasSemana 2-CALC 3 - 2020-2Lucy FloresAún no hay calificaciones
- Reporte Metodo de Euler C6-A1Documento5 páginasReporte Metodo de Euler C6-A1alejandro0% (1)
- Teoría Planos en El EspacioDocumento5 páginasTeoría Planos en El EspacioSugey Pro AragónAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- REFLEXIONDocumento3 páginasREFLEXIONDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Planeamiento UrvanoDocumento2 páginasPlaneamiento UrvanoDavid Galeno Alvarado GuevaraAún no hay calificaciones
- REFLEXIONDocumento3 páginasREFLEXIONDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Reflexion Covid 19Documento6 páginasReflexion Covid 19David Galeno Alvarado GuevaraAún no hay calificaciones
- Metodo LeopoldDocumento3 páginasMetodo LeopoldDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Ficha VIABIIDADDocumento1 páginaFicha VIABIIDADDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Reflexion Covid 19Documento6 páginasReflexion Covid 19David Galeno Alvarado GuevaraAún no hay calificaciones
- Sifon OroyaDocumento12 páginasSifon OroyaCristian Sebastian Cerron PonceAún no hay calificaciones
- Parte 8 RoyDocumento8 páginasParte 8 RoyDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Vigas T y LDocumento18 páginasVigas T y LDavid Galeno Alvarado GuevaraAún no hay calificaciones
- LetraDocumento2 páginasLetraDavid Galeno Alvarado Guevara100% (1)
- Resumen La Imagen de La Ciudad Kevin LynchDocumento4 páginasResumen La Imagen de La Ciudad Kevin LynchCLC VERSION LIMITADA0% (1)
- CUESTIONARIODocumento1 páginaCUESTIONARIODavid Galeno Alvarado GuevaraAún no hay calificaciones
- Informe GeologiaDocumento15 páginasInforme GeologiaDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Libro de Mecanica de FluidosDocumento138 páginasLibro de Mecanica de FluidosDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Primer NivelDocumento1 páginaPrimer NivelDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Demostracion de La EcuacionesDocumento17 páginasDemostracion de La EcuacionesDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Campos VectorialesDocumento24 páginasCampos VectorialesDavid Galeno Alvarado GuevaraAún no hay calificaciones
- InformalDocumento17 páginasInformalDavid Galeno Alvarado GuevaraAún no hay calificaciones
- E Structur AsDocumento9 páginasE Structur AsDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Ecuaciones Diferenciales de Primer Orden-Grupo 1Documento56 páginasEcuaciones Diferenciales de Primer Orden-Grupo 1David Galeno Alvarado GuevaraAún no hay calificaciones
- Material de LaboratorioDocumento2 páginasMaterial de LaboratorioDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Equipo Ouvellas - Presentacion Material LaboratorioDocumento84 páginasEquipo Ouvellas - Presentacion Material Laboratoriojrb759100% (2)
- Diseño Geometrico de CarreterasDocumento29 páginasDiseño Geometrico de CarreterasDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Ecuaciónes DinámicasDocumento13 páginasEcuaciónes DinámicasDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Diseño Geometrico de CarreterasDocumento29 páginasDiseño Geometrico de CarreterasDavid Galeno Alvarado GuevaraAún no hay calificaciones
- Termo 10.3Documento20 páginasTermo 10.3Andres Felipe Chavez ContrerasAún no hay calificaciones
- Algebra Linea 2 Det-Rng.-InvDocumento4 páginasAlgebra Linea 2 Det-Rng.-InvKatily GuillénAún no hay calificaciones
- Guia de Ciencias Naturales.Documento5 páginasGuia de Ciencias Naturales.Alba Milena Ruiz CabreraAún no hay calificaciones
- Unidad 1 Tarea 1 - Vectores, Matrices y DeterminantesDocumento4 páginasUnidad 1 Tarea 1 - Vectores, Matrices y DeterminantesDaya SarriasAún no hay calificaciones
- Semna 3 QuimicaDocumento6 páginasSemna 3 QuimicaLesly Melendez FloresAún no hay calificaciones
- Clase 3 - Espacio de Kets y Representación MatricialDocumento26 páginasClase 3 - Espacio de Kets y Representación MatricialHector AlmanzaAún no hay calificaciones
- EnlaceQuimico Gillespie PDFDocumento10 páginasEnlaceQuimico Gillespie PDFisaacrichicardoAún no hay calificaciones
- Trabajo de Fuerza MagneticaDocumento2 páginasTrabajo de Fuerza MagneticaMatias De los santosAún no hay calificaciones
- Sesión 5Documento8 páginasSesión 5LUISITO MINIMOYAún no hay calificaciones
- Solución Taller de FísicaDocumento4 páginasSolución Taller de FísicaXl jhonier Xl100% (1)
- Trigon - 04 B (3) Teoría - (A)Documento4 páginasTrigon - 04 B (3) Teoría - (A)enrique soria durandAún no hay calificaciones
- Cap 6 GasesDocumento40 páginasCap 6 GasesJose Luis SamoAún no hay calificaciones
- Presentación Números CuánticosDocumento49 páginasPresentación Números CuánticosAlexis WongAún no hay calificaciones
- Configuración ElectrónicaDocumento3 páginasConfiguración ElectrónicacynthiaAún no hay calificaciones
- CAP 1 GASES REALES. Parte 3 Teoría Cinética de GasesDocumento29 páginasCAP 1 GASES REALES. Parte 3 Teoría Cinética de GasesDaniel FeymanAún no hay calificaciones
- 03 - E2023 - TP MagnetismoDocumento8 páginas03 - E2023 - TP MagnetismoSebastian MortaloniAún no hay calificaciones
- FISICA 3-Carga Eléctrica elemental-CASTILLO SOTO JOSE RAULDocumento7 páginasFISICA 3-Carga Eléctrica elemental-CASTILLO SOTO JOSE RAULJOSE RAUL CASTILLO SOTOAún no hay calificaciones
- Practica de Laboratorio Grupo 5Documento10 páginasPractica de Laboratorio Grupo 5Segundo GuambañaAún no hay calificaciones
- Ejercicios III Unidad-2021-II-Indicador I-5Documento14 páginasEjercicios III Unidad-2021-II-Indicador I-5David Heredia TapiaAún no hay calificaciones
- Teoría AtómicaDocumento6 páginasTeoría AtómicasesechaAún no hay calificaciones
- Formulario de CalculoDocumento40 páginasFormulario de CalculoJonathan Enrique Martínez GómezAún no hay calificaciones
- Reporte #5 Lab. Control ModernoDocumento9 páginasReporte #5 Lab. Control ModernoYesenia ReyesAún no hay calificaciones
- 02 Transformadas GeométricasDocumento8 páginas02 Transformadas GeométricasJenny DiazAún no hay calificaciones
- 3-Longitud de Arco y CurvaturaDocumento9 páginas3-Longitud de Arco y CurvaturaAndrea TomlinsonAún no hay calificaciones
- Electro 3Documento12 páginasElectro 3Maisy SimmerAún no hay calificaciones
- Exp Pag292 Eje2Documento5 páginasExp Pag292 Eje2Cristian Javier Perez HernandezAún no hay calificaciones
- Ejercicio Unidad 1 Medios Continuos PDFDocumento51 páginasEjercicio Unidad 1 Medios Continuos PDFjavoidea696526Aún no hay calificaciones
- Sintesis Matematica 4 U2Documento1 páginaSintesis Matematica 4 U2MyokaCastroAún no hay calificaciones
- Presentacion 3 Divergencia y RotacionalDocumento31 páginasPresentacion 3 Divergencia y RotacionalCHAVEZ SANCHEZ JOSE DE JESUS INGENIER�A EL�CTRICAAún no hay calificaciones