También podría gustarte
- Trabajo Gerencia 2Documento17 páginasTrabajo Gerencia 2Edwin Galiano67% (3)
- Untitled 3Documento5 páginasUntitled 3Marco NavarreteAún no hay calificaciones
- Examen INVOPEDocumento2 páginasExamen INVOPEluis anthony jamill avila sanchezAún no hay calificaciones
- Examen de Investigación de OperacionesDocumento3 páginasExamen de Investigación de OperacionesEricka Del Rosario Fernandez GastiaburuAún no hay calificaciones
- Ejercicios de Io 1Documento10 páginasEjercicios de Io 1Pablo Cesar VergaraAún no hay calificaciones
- INVESTIGACIÓN DE OPERACIONES - s2Documento19 páginasINVESTIGACIÓN DE OPERACIONES - s2Menyi Owen Yupanqui SotoAún no hay calificaciones
- D Programación Lineal KrajewskiDocumento47 páginasD Programación Lineal KrajewskiSamanta Silva50% (2)
- Solucionario 02Documento2 páginasSolucionario 02Christian López Aguilar0% (5)
- Guia Uno PLEDocumento2 páginasGuia Uno PLEedgardo_sama0% (2)
- Ejercicio 8 TahaDocumento2 páginasEjercicio 8 TahaMario VargasAún no hay calificaciones
- Ejercicios en EquipoDocumento17 páginasEjercicios en EquipoVerox Palacis Pardo0% (1)
- Investigacion OperativaDocumento43 páginasInvestigacion OperativaEVELYN ANDREA MEJIA GUADAMUDAún no hay calificaciones
- Metodo SimplexDocumento13 páginasMetodo Simplexemersonblas0% (1)
- UTN InvOp TP7 Arbol de DecisionesDocumento6 páginasUTN InvOp TP7 Arbol de DecisionesRosita MasabandaAún no hay calificaciones
- Problemas 1 (Hillier)Documento2 páginasProblemas 1 (Hillier)eliu0% (1)
- Problema 1Documento3 páginasProblema 1Laura DomínguezAún no hay calificaciones
- Casos 1 y 2Documento19 páginasCasos 1 y 2Luis Cavero33% (3)
- 8.7 Problemas de MediosDocumento2 páginas8.7 Problemas de MediosAiitaqq IlyAún no hay calificaciones
- Problema 1Documento3 páginasProblema 1Laura DomínguezAún no hay calificaciones
- Taller 3-Ejer 5 y 6 - Investigacion OperacionesDocumento8 páginasTaller 3-Ejer 5 y 6 - Investigacion OperacionesMAURICIO GONZALEZAún no hay calificaciones
- Tarea 3 Metodos y Modelos de OptimizacionDocumento3 páginasTarea 3 Metodos y Modelos de OptimizacionLuis Molina0% (1)
- S04.s1 - Programacion LinealDocumento1 páginaS04.s1 - Programacion LinealCarlos Tecnico0% (1)
- 6 Programacion EnteraDocumento72 páginas6 Programacion EnteraChristian ChdAún no hay calificaciones
- Taller Analisis de SenDocumento3 páginasTaller Analisis de SenJuanita Maria Galindo AmayaAún no hay calificaciones
- Ejercicio 1 Admon. IndsutrialDocumento13 páginasEjercicio 1 Admon. IndsutrialEdward MirandaAún no hay calificaciones
- Componente Costo de Manufactura Costo de Compra: ProblemasDocumento1 páginaComponente Costo de Manufactura Costo de Compra: ProblemasMarthaAún no hay calificaciones
- Foro II: REDESDocumento7 páginasForo II: REDESLuis Sialer100% (1)
- Tercer Examen Parcial IO II Ramírez Vargas KarlaDocumento6 páginasTercer Examen Parcial IO II Ramírez Vargas KarlaKarlaAún no hay calificaciones
- Tarea 3Documento1 páginaTarea 3Daniel Pincay ChAún no hay calificaciones
- Problemas Metas Modelacion-Agosto-Enero 2020 Sin ResultadosDocumento5 páginasProblemas Metas Modelacion-Agosto-Enero 2020 Sin ResultadosSofiaAún no hay calificaciones
- Ejercicio Sesión 16Documento1 páginaEjercicio Sesión 16Wendy Paola Rodriguez PerezAún no hay calificaciones
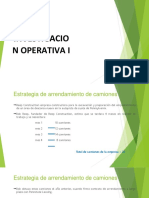
- Estrategia de Arrendamiento de Camiones 2Documento14 páginasEstrategia de Arrendamiento de Camiones 2SammerVegaAún no hay calificaciones
- 3 Problema de Plan de ProduccionDocumento6 páginas3 Problema de Plan de ProduccionJesus CastañedaAún no hay calificaciones
- Ejercicios de TransporteDocumento3 páginasEjercicios de TransporteWendy Johana Arteaga OrdoñezAún no hay calificaciones
- Taller Repaso Modelos de Transporte y AsignaciónDocumento4 páginasTaller Repaso Modelos de Transporte y AsignaciónJ Alejo Reina SánchezAún no hay calificaciones
- Modelos Con FaltantesDocumento7 páginasModelos Con FaltantesJairo JLGM0% (1)
- Taller 2 IoDocumento10 páginasTaller 2 IoLAURENT VALENTINA FARIETA SALGADOAún no hay calificaciones
- JaraDocumento9 páginasJaraAlbert PandiaAún no hay calificaciones
- InvestigacionDocumento11 páginasInvestigacionjoseph andiaAún no hay calificaciones
- Tarea Semana 1Documento9 páginasTarea Semana 1Jean Carlos Estevez SolisAún no hay calificaciones
- Clase 01 - Invope2Documento17 páginasClase 01 - Invope2Victor Manuel Jambo GallardoAún no hay calificaciones
- Ejercicio 10Documento2 páginasEjercicio 10hernando luis sanchez aguirreAún no hay calificaciones
- Investigaciones de Operaciones Programacion LinealDocumento6 páginasInvestigaciones de Operaciones Programacion LinealRichard0% (1)
- Tareas LingoDocumento9 páginasTareas LingoNezuko YoichiAún no hay calificaciones
- Problemas Laboratorio 5 y 6Documento7 páginasProblemas Laboratorio 5 y 6Anonymous 9j9tg3FT0% (1)
- Quiz 5 EdwardsDocumento1 páginaQuiz 5 EdwardsAndres Mauricio Velasquez Ortiz0% (3)
- Optativo Io I I 2019Documento2 páginasOptativo Io I I 2019Mauricio Gomez Sarmiento0% (1)
- Primer Parcial I.O G-01Documento4 páginasPrimer Parcial I.O G-01Julián HernándezAún no hay calificaciones
- Ejemplo Clase 20200720Documento1 páginaEjemplo Clase 20200720Roger FlowersAún no hay calificaciones
- Grupo 6Documento10 páginasGrupo 6DIEGO GIAN PIERRE QUEZADA VALDERRAMAAún no hay calificaciones
- Evaluacion Final de IoDocumento1 páginaEvaluacion Final de IoCUERVO HIGUERA DANIEL ANDRESAún no hay calificaciones
- Preguntas de Repaso Cap 13Documento12 páginasPreguntas de Repaso Cap 13Roger ChanAún no hay calificaciones
- Proyecto Io Programacion EnteraDocumento36 páginasProyecto Io Programacion EnteraDuvan LeónAún no hay calificaciones
- Programacion EnteraDocumento14 páginasProgramacion EnteraValhia Loarte Sana0% (1)
- Investigacion de Operaciones Unidad 4Documento28 páginasInvestigacion de Operaciones Unidad 4edu1569Aún no hay calificaciones
- Unidad 3 Programación EnteraDocumento16 páginasUnidad 3 Programación EnteraElias Chuc Falcon50% (2)
- Investigacion de Operaciones 1 Unidad 3 y 4Documento44 páginasInvestigacion de Operaciones 1 Unidad 3 y 4ManuelAlejandroMuñozLópez76% (21)
- Investigacion de Operaciones 1Documento20 páginasInvestigacion de Operaciones 1Jonathan Ramiro Grijalva herreraAún no hay calificaciones
- Inv.3 Zapata JoseDocumento15 páginasInv.3 Zapata JoseEduardo ZapataAún no hay calificaciones
- Programacion Entera (Finalizado) PDFDocumento24 páginasProgramacion Entera (Finalizado) PDFAnonymous TlSkcq100% (1)
- Investigación Operativa PL y Método Gráfico Clase 2Documento29 páginasInvestigación Operativa PL y Método Gráfico Clase 2Zelton GonzálezAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación - Tarea 4 - Solución de Modelos de Programación Lineal de Decisión y OptimizaciónDocumento14 páginasGuía de Actividades y Rúbrica de Evaluación - Tarea 4 - Solución de Modelos de Programación Lineal de Decisión y OptimizaciónElianaAún no hay calificaciones
- Upo 183 TC2 V2Documento46 páginasUpo 183 TC2 V2Serrat RobertAún no hay calificaciones
- Evaluación N°2Documento5 páginasEvaluación N°2brayan jeissonAún no hay calificaciones
- Programacion LinealDocumento39 páginasProgramacion Linealjhon100% (1)
- M. VogelDocumento5 páginasM. VogelJ Luciano BlasAún no hay calificaciones
- 6 - Programación Lineal - Formulación Del ProblemaDocumento27 páginas6 - Programación Lineal - Formulación Del Problemamatias olmosAún no hay calificaciones
- PIRÁMIDESDocumento14 páginasPIRÁMIDESJuan Esteban QuiñonezAún no hay calificaciones
- PIRÁMIDEDocumento7 páginasPIRÁMIDEYubitza VillegasAún no hay calificaciones
- TP2 2020 PlgraficoDocumento2 páginasTP2 2020 PlgraficoMatias Di PietroAún no hay calificaciones
- Programacion Lineal Daniel Corregido.Documento24 páginasProgramacion Lineal Daniel Corregido.LILILAURAAún no hay calificaciones
- 1 2 Modelo Gral de MetasDocumento3 páginas1 2 Modelo Gral de MetasFrancisco SchuldinerAún no hay calificaciones
- Practica de PoliedroDocumento3 páginasPractica de PoliedroNieves de la CruzAún no hay calificaciones
- Introducción A La Investigación de OperacionesDocumento12 páginasIntroducción A La Investigación de OperacionesAlba Laura Madrigal LopezAún no hay calificaciones
- Modelacion de Problemas de Programacion LinealDocumento27 páginasModelacion de Problemas de Programacion LinealYanetQuinteroAún no hay calificaciones
- Quiz 1 Y 2 CORREGIDO DE PROGRAMACION LINEAL PDFDocumento20 páginasQuiz 1 Y 2 CORREGIDO DE PROGRAMACION LINEAL PDFJose Luis Gomez VillamilAún no hay calificaciones
- Optimizacion Abejas PDFDocumento63 páginasOptimizacion Abejas PDFAngelCaimanqueAcuñaAún no hay calificaciones
- Syllabus UPADocumento2 páginasSyllabus UPATobías VeraAún no hay calificaciones
- Prob03 Programacion LinealDocumento8 páginasProb03 Programacion LinealXHans CarpioxAún no hay calificaciones
- Geometria Del Espacio - Beca 18Documento10 páginasGeometria Del Espacio - Beca 18pazmaria00042Aún no hay calificaciones
- Optimización de Un Sistema de Seis Barras Utilizando El Algoritmo de Garver, GAMS y Power WorldDocumento10 páginasOptimización de Un Sistema de Seis Barras Utilizando El Algoritmo de Garver, GAMS y Power WorldJulio AguileraAún no hay calificaciones
- InvestifaDocumento22 páginasInvestifaZeroBlazzAún no hay calificaciones
- Tarea 3Documento2 páginasTarea 3PARRAAún no hay calificaciones
- Ficha de Matemática 11-05-23Documento3 páginasFicha de Matemática 11-05-23ANGELICAAún no hay calificaciones
- Ensayo Logistica TerminadoDocumento5 páginasEnsayo Logistica TerminadoIvan MendezAún no hay calificaciones
- Problema de Transporte CLASE 3Documento13 páginasProblema de Transporte CLASE 3Lupita Garcia de LopezAún no hay calificaciones
- Cuestionario Matemáticas 2024Documento10 páginasCuestionario Matemáticas 2024Alexia AbadAún no hay calificaciones
- Semana 5 PL Con Metodo Simplex 2019-1b m2Documento42 páginasSemana 5 PL Con Metodo Simplex 2019-1b m2Sandra SaldañaAún no hay calificaciones
- Qué Es FODADocumento8 páginasQué Es FODAcristian dominguezAún no hay calificaciones
- Pa Nro 01 DesarrolladoDocumento15 páginasPa Nro 01 DesarrolladoCristian Jorge DelgadoAún no hay calificaciones