También podría gustarte
- Ogatasol 2Documento51 páginasOgatasol 2Emiliano SegovianoAún no hay calificaciones
- Preguntas ALMACENAMIENTO DE MEDICAMENTOS Y DISPOSITIVOS MÉDICOSDocumento3 páginasPreguntas ALMACENAMIENTO DE MEDICAMENTOS Y DISPOSITIVOS MÉDICOSNery Art100% (4)
- Lab. Elect Industrial A - Practica 6 - Emilio Fuentes Carreon.Documento2 páginasLab. Elect Industrial A - Practica 6 - Emilio Fuentes Carreon.Emilio FuentesAún no hay calificaciones
- Disparo Del Triac Con UJTDocumento3 páginasDisparo Del Triac Con UJTJhonatan Choque TorrezAún no hay calificaciones
- Amplificador Integrador y DerivadorDocumento4 páginasAmplificador Integrador y DerivadorSamirDominguezAún no hay calificaciones
- Examen Medio CursoDocumento23 páginasExamen Medio Cursorick mAún no hay calificaciones
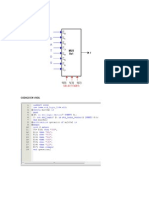
- Codificación Del Amplificador OperacionalDocumento11 páginasCodificación Del Amplificador Operacionalanon_9676747100% (1)
- Bourdieu - La Ruptura PDFDocumento25 páginasBourdieu - La Ruptura PDFValerie Marchena MontalvoAún no hay calificaciones
- ViaCrusis Divina VoluntadDocumento38 páginasViaCrusis Divina VoluntadGuadalupedelfiat100% (4)
- Levitador NeumáticoDocumento18 páginasLevitador NeumáticoManotoa Jordan AlexAún no hay calificaciones
- Astable y MonoestableDocumento22 páginasAstable y MonoestableEudomar Junior Gutierrez BeltranAún no hay calificaciones
- Diseño de Contadores SincronosDocumento12 páginasDiseño de Contadores Sincronosorlando_heredia7934Aún no hay calificaciones
- Compensador de AdelantoDocumento15 páginasCompensador de AdelantojohnluzardoAún no hay calificaciones
- Acoplamiento CapacitivoDocumento11 páginasAcoplamiento CapacitivoMiguel Angel100% (1)
- Pre Informe Conversor Ac Ac - MolinaDocumento12 páginasPre Informe Conversor Ac Ac - MolinaNachiin MolinaAún no hay calificaciones
- Convertidor de Voltaje A Corriente Constante Con Carga FlotanteDocumento3 páginasConvertidor de Voltaje A Corriente Constante Con Carga FlotanteCristian CuevasAún no hay calificaciones
- Diseño Logico Secuencial Con VHDLDocumento43 páginasDiseño Logico Secuencial Con VHDLENIC-AITCG100% (1)
- Proyecto Control de Velocidad de Un Motor DCDocumento3 páginasProyecto Control de Velocidad de Un Motor DCJosé AlanizAún no hay calificaciones
- LGRDocumento34 páginasLGRJose RangelAún no hay calificaciones
- Comando IDENT MatlabDocumento7 páginasComando IDENT Matlabangel guerreroAún no hay calificaciones
- INFORME Diseno en ProteusDocumento16 páginasINFORME Diseno en ProteusJulyän Tömbë100% (1)
- Modelado de Sistemas Electromecánicos (Motor DC)Documento26 páginasModelado de Sistemas Electromecánicos (Motor DC)Maria Sarai Mendez CruzAún no hay calificaciones
- D. ElementosDocumento36 páginasD. ElementosDavid FuentessAún no hay calificaciones
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesDocumento4 páginasTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- Conversión de Código Gray A 7 SegmentoDocumento8 páginasConversión de Código Gray A 7 SegmentoValentina RoyeroAún no hay calificaciones
- Ejercicios de Controlabilidad y ObservabilidadDocumento6 páginasEjercicios de Controlabilidad y ObservabilidadDaniel Ortega CastilloAún no hay calificaciones
- Ejercicio. Filtro Pasa-Banda, Rechazo de BandaDocumento3 páginasEjercicio. Filtro Pasa-Banda, Rechazo de Bandaalu0100815382Aún no hay calificaciones
- Controlador Pid AscensorDocumento20 páginasControlador Pid AscensorAlbert Willy100% (2)
- Como Crear SubvisDocumento3 páginasComo Crear SubvisDWilliam93Aún no hay calificaciones
- Capitulo 8 WordDocumento104 páginasCapitulo 8 Word....Aún no hay calificaciones
- Movimiento Rígido y Transformaciones Homogéneas - 17041177 PDFDocumento15 páginasMovimiento Rígido y Transformaciones Homogéneas - 17041177 PDFEdgar MorenoAún no hay calificaciones
- Práctica 5 Laboratorio de Potencia, Detector Cruce Por Cero.Documento12 páginasPráctica 5 Laboratorio de Potencia, Detector Cruce Por Cero.Jorfel AdonayAún no hay calificaciones
- Control PIDMotor DCDocumento12 páginasControl PIDMotor DCZahyre StarkAún no hay calificaciones
- Transformada ZDocumento118 páginasTransformada ZJonathan Ferney CastroAún no hay calificaciones
- Codificador de Redundancia Cíclica de 8 Bits en FPGADocumento2 páginasCodificador de Redundancia Cíclica de 8 Bits en FPGAJuancho's MuñozAún no hay calificaciones
- Laboratorio N°1 - Control DigitalDocumento7 páginasLaboratorio N°1 - Control DigitalEtson Heasid Tarazona CalixtoAún no hay calificaciones
- Taller Transformada ZDocumento4 páginasTaller Transformada ZAlejandro RiosAún no hay calificaciones
- Circuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sDocumento4 páginasCircuito de Disparo para Un Rectificador Trifásico Controlado Empleando SCR'sJ.A. Calvillo100% (1)
- Informe Control de Temperatura para Un CautínDocumento3 páginasInforme Control de Temperatura para Un CautínAlejandra OrdóñezAún no hay calificaciones
- Función de Transferencia de Un Motor DCDocumento17 páginasFunción de Transferencia de Un Motor DCByron Ganazhapa50% (2)
- Parametros D-HDocumento22 páginasParametros D-HLane Claudio0% (1)
- Inversor Con Salida Rectangular: FuncionamientoDocumento5 páginasInversor Con Salida Rectangular: FuncionamientoPrueba nada masAún no hay calificaciones
- Ensayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Documento4 páginasEnsayo"Inversor DC/AC de Onda Pura para Cargas Monofasicas A Traves de SPWM Con Microcontroladores"Jaime Potes PardoAún no hay calificaciones
- Instrumentacion 5.1Documento13 páginasInstrumentacion 5.1juan pabloAún no hay calificaciones
- Convertidor Boost (MCC y MCD) Análisis de Convertidor Zeta y Convertidor SEPIC MCDDocumento29 páginasConvertidor Boost (MCC y MCD) Análisis de Convertidor Zeta y Convertidor SEPIC MCDLuis MartínezAún no hay calificaciones
- Criterios de Estabilidad JURYDocumento13 páginasCriterios de Estabilidad JURYDavid NietoAún no hay calificaciones
- Transformada Z Matlab 2Documento5 páginasTransformada Z Matlab 2Oscar RuizAún no hay calificaciones
- TAREA #2. Diseño de CompensadoresDocumento2 páginasTAREA #2. Diseño de CompensadoresELIAN EDMUNDO ARENAS YATACOAún no hay calificaciones
- Transformada ZDocumento45 páginasTransformada ZLuz666100% (1)
- Descripciones Espaciales y TransformacionesDocumento51 páginasDescripciones Espaciales y Transformacionesroy100% (1)
- Factor de EstabilidadDocumento20 páginasFactor de Estabilidadpotasioxd123Aún no hay calificaciones
- RegistrosDocumento13 páginasRegistrosLeonardo BorregoAún no hay calificaciones
- Multiplexor 8X1Documento3 páginasMultiplexor 8X1Ernesto Pinedo Castillo100% (1)
- Adc Pic 18F4550Documento6 páginasAdc Pic 18F4550Aalfredo Lezama RamirezAún no hay calificaciones
- Reporte de Tacometro DigitalDocumento10 páginasReporte de Tacometro DigitalEsteban Padilla GonzalezAún no hay calificaciones
- Introducción y Conclusión Transformada ZDocumento2 páginasIntroducción y Conclusión Transformada ZAriel AchurraAún no hay calificaciones
- ProyetofinallevitadorDocumento7 páginasProyetofinallevitadorFrancis Richard Lopez RamosAún no hay calificaciones
- Modelación, Simulación y Control de Un LevitadorDocumento6 páginasModelación, Simulación y Control de Un LevitadorElias Cuevas BaxterAún no hay calificaciones
- Proyecto Levitacion Neumatica AcabadoDocumento11 páginasProyecto Levitacion Neumatica AcabadoHitler Ivan Chacon QuispeAún no hay calificaciones
- Informe Final LevitadorDocumento9 páginasInforme Final LevitadorPipe AriasAún no hay calificaciones
- Modelación, Simulación y Control de Un Levitador NeumáticoDocumento9 páginasModelación, Simulación y Control de Un Levitador NeumáticoAdalberto LazariniAún no hay calificaciones
- Proyecto-HIL-control de Velocidad de Banda TransportadoraDocumento13 páginasProyecto-HIL-control de Velocidad de Banda TransportadoraRonald PuchaAún no hay calificaciones
- Levitador - Neumático PruebaDocumento7 páginasLevitador - Neumático PruebaManotoa Jordan AlexAún no hay calificaciones
- Inyeccion Electronica Gasolina Tomo 5Documento24 páginasInyeccion Electronica Gasolina Tomo 5calos cariAún no hay calificaciones
- Norma Trigo, Cebada y AvenaDocumento5 páginasNorma Trigo, Cebada y Avenacirilo jimenez aparco100% (1)
- Ensayo de SPT MichelleDocumento14 páginasEnsayo de SPT MichelleAlan CoronelAún no hay calificaciones
- Desarrollo Historico de La Ciencia Politica 2022Documento56 páginasDesarrollo Historico de La Ciencia Politica 2022Celeste MarroquínAún no hay calificaciones
- Trabajo Práctico Seguridad e HigieneDocumento8 páginasTrabajo Práctico Seguridad e Higienelιттle ωɨтchღAún no hay calificaciones
- Elaborando La Planeación Financiera - Act1Documento14 páginasElaborando La Planeación Financiera - Act1Miguel Magaña0% (1)
- El Concepto de CulturaDocumento12 páginasEl Concepto de CulturaVergina BajkovaAún no hay calificaciones
- Curso Basico de Seguridad PortuariaDocumento54 páginasCurso Basico de Seguridad PortuariaJaime Ivan Vera MelgarAún no hay calificaciones
- Operadores Extensionales (Heterocosmica - Dolezel)Documento6 páginasOperadores Extensionales (Heterocosmica - Dolezel)ezequielvilaAún no hay calificaciones
- Hola Andres Soy Maria Otra Vez - Loquel - Heredia Maria F - SANT - LOQUE - 9789504643531 - Anna's ArchiveDocumento140 páginasHola Andres Soy Maria Otra Vez - Loquel - Heredia Maria F - SANT - LOQUE - 9789504643531 - Anna's Archivenelson evansAún no hay calificaciones
- Contrato de Arrendamiento de Espacio para Arte StudioDocumento9 páginasContrato de Arrendamiento de Espacio para Arte StudioFco. Javier Garcia RojasAún no hay calificaciones
- Ingeniería y Leyes de NewtonDocumento4 páginasIngeniería y Leyes de NewtonErika Espejo0% (1)
- Pruebas ParamétricasDocumento22 páginasPruebas ParamétricasMartha HerreraAún no hay calificaciones
- E Glosario de Terminos y Simbolos PDFDocumento2 páginasE Glosario de Terminos y Simbolos PDFRamon pujols100% (1)
- REL 2o - Medio - PDFDocumento159 páginasREL 2o - Medio - PDFMaria Andrea Fuenzalida100% (1)
- Sistema Circulatorio - Vascularización de La Extremidad SuperiorDocumento5 páginasSistema Circulatorio - Vascularización de La Extremidad SuperiorYava GreenAún no hay calificaciones
- Tríptico Secado - Química IndustrialDocumento2 páginasTríptico Secado - Química IndustrialFernando Aguirre100% (1)
- Glosario de Neurociencia 150Documento9 páginasGlosario de Neurociencia 150Marilin Amarilis KaalAún no hay calificaciones
- Guia de Laboratorio de Suelos 2Documento121 páginasGuia de Laboratorio de Suelos 2vicmarmansillaAún no hay calificaciones
- Guía Transición - Ni Sopa, Ni SopitaDocumento56 páginasGuía Transición - Ni Sopa, Ni SopitanubialvarezAún no hay calificaciones
- Definición de Cerámicos en QuímicaDocumento2 páginasDefinición de Cerámicos en Químicabruno garciaAún no hay calificaciones
- Disposiciones Técnicas de Seguridad Contra Incendios: Benemérito Cuerpo de Bomberos de GuayaquilDocumento13 páginasDisposiciones Técnicas de Seguridad Contra Incendios: Benemérito Cuerpo de Bomberos de Guayaquiljose smithAún no hay calificaciones
- Esquema Informe RSUDocumento40 páginasEsquema Informe RSUBrayam TorresAún no hay calificaciones
- Politraumatizado - Informe 8Documento6 páginasPolitraumatizado - Informe 8Joseph ZamoraAún no hay calificaciones
- Agua TurbiaDocumento6 páginasAgua TurbiaGonzaloUrrutiaAún no hay calificaciones
- Ventius Polvo en Mineria 2016Documento18 páginasVentius Polvo en Mineria 2016John Cheppe AguirreAún no hay calificaciones
- Enfermedad Diarreica Aguda.: Por: Laura Escobar AraqueDocumento31 páginasEnfermedad Diarreica Aguda.: Por: Laura Escobar AraqueLaura EscobarAún no hay calificaciones