0% encontró este documento útil (0 votos)
162 vistas26 páginasIntroducción a Espacios Vectoriales y Vectores
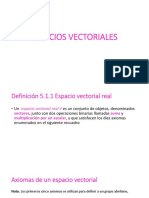
El documento describe los conceptos básicos de vectores y espacios vectoriales. Define un vector como un segmento de recta dirigido con longitud y dirección, y un espacio vectorial como un conjunto de vectores que cumplen diez axiomas relacionados con las operaciones de suma vectorial y multiplicación por escalares. Presenta varios ejemplos de conjuntos que sí y no constituyen espacios vectoriales, como polinomios, matrices y funciones continuas.
Cargado por
RaquelAbigailJerónimoDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
162 vistas26 páginasIntroducción a Espacios Vectoriales y Vectores
El documento describe los conceptos básicos de vectores y espacios vectoriales. Define un vector como un segmento de recta dirigido con longitud y dirección, y un espacio vectorial como un conjunto de vectores que cumplen diez axiomas relacionados con las operaciones de suma vectorial y multiplicación por escalares. Presenta varios ejemplos de conjuntos que sí y no constituyen espacios vectoriales, como polinomios, matrices y funciones continuas.
Cargado por
RaquelAbigailJerónimoDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como DOCX, PDF, TXT o lee en línea desde Scribd