También podría gustarte
- Sebastian PagadorDocumento1 páginaSebastian PagadorFanor Rojas FernandezAún no hay calificaciones
- Informe Proyecto ArduinoDocumento13 páginasInforme Proyecto ArduinoRicardo Gómez MAún no hay calificaciones
- Construir Un Motor Homopolar CaseroDocumento11 páginasConstruir Un Motor Homopolar CaseroMiguel Angel Martinez MejiaAún no hay calificaciones
- Analisis Del Himno Nacional de BoliviaDocumento2 páginasAnalisis Del Himno Nacional de BoliviaIanatatGuerra0% (1)
- Overclocking y Refrigeración PDFDocumento13 páginasOverclocking y Refrigeración PDFMayraFernandezAún no hay calificaciones
- BiografiaDocumento2 páginasBiografiayair vazquezAún no hay calificaciones
- La DespatriarcalizaciónDocumento10 páginasLa DespatriarcalizaciónedgarAún no hay calificaciones
- Fernando FarelDocumento37 páginasFernando FarelJosia Rca100% (1)
- La Educación VialDocumento2 páginasLa Educación Vialgustavo814430100% (1)
- Desarrollo de La Espresion Instrumental en Base A Instrumentos AutoctonosDocumento6 páginasDesarrollo de La Espresion Instrumental en Base A Instrumentos AutoctonosGantemiamer CondoriAún no hay calificaciones
- La Ciencia y La BioquímicaDocumento24 páginasLa Ciencia y La BioquímicaGONZALO FRANCISCO AVILA FLORESAún no hay calificaciones
- Practica N0 06 Sistema Circulatorio (Giannella Yosheanny Cuyo Paucar)Documento4 páginasPractica N0 06 Sistema Circulatorio (Giannella Yosheanny Cuyo Paucar)Giannella cuyo paucarAún no hay calificaciones
- Aplicaciones de Los Sistemas Hidráulicos y NeumáticosDocumento3 páginasAplicaciones de Los Sistemas Hidráulicos y NeumáticosJaciel J. MéneraAún no hay calificaciones
- Edgar Palacios RodríguezDocumento4 páginasEdgar Palacios RodríguezluiscuencaojedaAún no hay calificaciones
- Informe TK-SAT PDFDocumento24 páginasInforme TK-SAT PDFjhonAún no hay calificaciones
- Analisis e Interpretacion de ResultadosDocumento2 páginasAnalisis e Interpretacion de ResultadosJostein Steven Ucañan GrdilloAún no hay calificaciones
- Lógica KinsaticaDocumento4 páginasLógica Kinsaticaethan erlan33% (3)
- Cala CalaDocumento6 páginasCala Calamantiz4ever100% (1)
- Analicis Literario de La Obra-Trabajo de AlisonDocumento6 páginasAnalicis Literario de La Obra-Trabajo de Alisonpapas salchiAún no hay calificaciones
- Historia de TarijaDocumento4 páginasHistoria de TarijaLimbert Luis100% (1)
- Alquenos MonoDocumento14 páginasAlquenos MonoDavid Fernando Chacon Candia0% (1)
- Electrostática Como Fenómeno de La NaturalezaDocumento6 páginasElectrostática Como Fenómeno de La Naturaleza29 Luis Vidal Queso MendozaAún no hay calificaciones
- Trigonometria 1Documento8 páginasTrigonometria 1joseAún no hay calificaciones
- RominaDocumento2 páginasRominafernando100% (1)
- Botella de LeydenDocumento8 páginasBotella de Leydenknew999Aún no hay calificaciones
- Los Fenómenos Eléctricos Como Fuente de Energía para La VidaDocumento7 páginasLos Fenómenos Eléctricos Como Fuente de Energía para La VidaLópez Basilio Ilse RominaAún no hay calificaciones
- Guía Practica 1 Control Industrial - Grupo 5Documento6 páginasGuía Practica 1 Control Industrial - Grupo 5Andres MendozAún no hay calificaciones
- Analisis CondensadorDocumento17 páginasAnalisis CondensadorDiego Paredes UrrutiaAún no hay calificaciones
- Mínimo Común Múltiplo de Expresiones AlgebraicasDocumento5 páginasMínimo Común Múltiplo de Expresiones Algebraicasjuadad77Aún no hay calificaciones
- Triptico QuimicaDocumento2 páginasTriptico QuimicaMegustas MuchoAún no hay calificaciones
- Que Son Las Formas VocalesDocumento9 páginasQue Son Las Formas VocalesErick EricksonAún no hay calificaciones
- Ejercicios de AplicaiònDocumento2 páginasEjercicios de AplicaiònNickolas ArroyoAún no hay calificaciones
- Crucigrama Crisis Econmica de 1929Documento2 páginasCrucigrama Crisis Econmica de 1929JOANNIS ANDREA MORENO TARANGOAún no hay calificaciones
- Crucigrama - CelulaDocumento2 páginasCrucigrama - CelulaGloria SanmartinAún no hay calificaciones
- Biografias de MusicaDocumento2 páginasBiografias de MusicaSantiago Lopez mendozaAún no hay calificaciones
- Informe MusicalDocumento49 páginasInforme MusicalTomas GonzalezAún no hay calificaciones
- Sales NeutrasDocumento4 páginasSales NeutrasRodrigoLeañoAún no hay calificaciones
- Infografia Anaerobica y AerobicaDocumento1 páginaInfografia Anaerobica y AerobicaRodea Vargas María FernandaAún no hay calificaciones
- Guía para Circuitos Eléctricos en Serie, Paralelo, MixtoDocumento10 páginasGuía para Circuitos Eléctricos en Serie, Paralelo, MixtoSebastian LaraAún no hay calificaciones
- VULNERABLESDocumento3 páginasVULNERABLESflores emil100% (1)
- Jesús LaraDocumento12 páginasJesús LaraMaría Nelly Uriona Tuma100% (3)
- Carnaval de PandoDocumento2 páginasCarnaval de Pandojose david rodriguez andiaAún no hay calificaciones
- Estación MeteorológicaDocumento18 páginasEstación MeteorológicaCarlos De La Rosa SanchezAún no hay calificaciones
- Carnaval en CochabambaDocumento5 páginasCarnaval en CochabambadddsdAún no hay calificaciones
- Mapa JudaísmoDocumento1 páginaMapa JudaísmoAryFabbraAún no hay calificaciones
- Proyecto de Antenas Satelitales en IstpDocumento6 páginasProyecto de Antenas Satelitales en IstpCarlos Medrano GonzalesAún no hay calificaciones
- La Máquina de Vapor de WattDocumento4 páginasLa Máquina de Vapor de WattMarilAún no hay calificaciones
- Instalar y Configurar Una Computadora de Escritorio Con WindowsDocumento7 páginasInstalar y Configurar Una Computadora de Escritorio Con Windowskortt72Aún no hay calificaciones
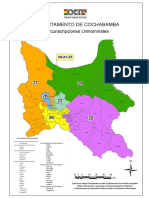
- Circunscripciones CochabambaDocumento1 páginaCircunscripciones Cochabambadiablo2289Aún no hay calificaciones
- Día de La Independencia de BoliviaDocumento2 páginasDía de La Independencia de BoliviaDorian Laguna QuispeAún no hay calificaciones
- Disipadores de CalorDocumento25 páginasDisipadores de CalorDi ElecAún no hay calificaciones
- La Novela Del ChacoDocumento1 páginaLa Novela Del ChacoInes RiscoAún no hay calificaciones
- Himno A PotosiDocumento1 páginaHimno A PotosiAntonio100% (1)
- Robot Seguidor de LineaDocumento11 páginasRobot Seguidor de LineaMauro AlfredoAún no hay calificaciones
- Transmisor y Receptor 433mhzDocumento8 páginasTransmisor y Receptor 433mhzFabianAún no hay calificaciones
- Gas Licuado de PetroleoDocumento3 páginasGas Licuado de Petroleomaireni mendieta marca100% (1)
- Robot Móvil Controlado Por BluetoothDocumento17 páginasRobot Móvil Controlado Por BluetoothGilmer Vásquez PérezAún no hay calificaciones
- Vehículo A Control RemotoDocumento12 páginasVehículo A Control RemotoElvisAún no hay calificaciones
- Seguidor de Línea (Profesional) - TdrobóticaDocumento19 páginasSeguidor de Línea (Profesional) - Tdrobóticagermanedu2000Aún no hay calificaciones
- Informe Aboo FinalDocumento9 páginasInforme Aboo FinalAlexandra Castro ValenciaAún no hay calificaciones
- 2020-Boleta de Pago UtilidadesDocumento1 página2020-Boleta de Pago UtilidadesEdgar Caceres Caceres100% (1)
- Caso Estudio 02Documento2 páginasCaso Estudio 02Edgar Caceres CaceresAún no hay calificaciones
- Marty 2019 - 1Documento2 páginasMarty 2019 - 1Edgar Caceres CaceresAún no hay calificaciones
- Sellos Mecánicos PDFDocumento92 páginasSellos Mecánicos PDFEdgar Caceres CaceresAún no hay calificaciones
- Sistema de AbastecimientosDocumento24 páginasSistema de AbastecimientosEdgar Caceres CaceresAún no hay calificaciones
- Caceres EdgarDocumento1 páginaCaceres EdgarEdgar Caceres CaceresAún no hay calificaciones
- Rastreo, Rastrear Envíos, Paquetes, Envíos - Rastreo DHL ExpressDocumento1 páginaRastreo, Rastrear Envíos, Paquetes, Envíos - Rastreo DHL ExpressGianni Blancos100% (1)
- Plantilla Precio de VentaDocumento6 páginasPlantilla Precio de VentaleobermeoAún no hay calificaciones
- Administrador de Sistemas de InformacionDocumento3 páginasAdministrador de Sistemas de InformacionRicardoAún no hay calificaciones
- Taller ApacheDocumento16 páginasTaller ApacheDaniel Bastidas RodriguezAún no hay calificaciones
- Mantenimiento IndustrialDocumento2 páginasMantenimiento IndustrialNyno Ignacio PrzAún no hay calificaciones
- PW I Clase 1-2 FinalDocumento3 páginasPW I Clase 1-2 FinalBernabé JW HabanaAún no hay calificaciones
- Avance2 POODocumento16 páginasAvance2 POOJaime Villaverde MontesAún no hay calificaciones
- Guía de Inicio Rápido de ProtaStructure 2021 PDFDocumento88 páginasGuía de Inicio Rápido de ProtaStructure 2021 PDFjorge luis Rodriguez H100% (1)
- 5 Maneras de Hacer Colaboraciones Musicales en Línea Más ProductivasDocumento6 páginas5 Maneras de Hacer Colaboraciones Musicales en Línea Más ProductivaslesoundAún no hay calificaciones
- Las Tic Una Ventana Al ConocimientoDocumento5 páginasLas Tic Una Ventana Al ConocimientoGrace Sofía DelgadoAún no hay calificaciones
- Configuración y Administración Del Espacio en DiscoDocumento2 páginasConfiguración y Administración Del Espacio en DiscoKristy Ulin Perez0% (1)
- Contrato de Desarrollo de SoftwareDocumento6 páginasContrato de Desarrollo de Softwarejorge25_25_7100% (2)
- Optimizacion de CodigoDocumento4 páginasOptimizacion de CodigoElsa Irene Herrera SantiagoAún no hay calificaciones
- En Que Momento Creo Que La Escuela Debería Migrar Alguna de Sus Bases de Datos y Que ConsideracionesDocumento3 páginasEn Que Momento Creo Que La Escuela Debería Migrar Alguna de Sus Bases de Datos y Que ConsideracionesJosé Larssen TrujilloAún no hay calificaciones
- U IV Modelo de AnalisisDocumento12 páginasU IV Modelo de AnalisisEdyUS12Aún no hay calificaciones
- Reparación PDFDocumento4 páginasReparación PDFCapacitaciones HardySoftAún no hay calificaciones
- Sesion 7 - Circuitos AritmeticosDocumento16 páginasSesion 7 - Circuitos AritmeticosKevin B SánchezAún no hay calificaciones
- 804 PDFDocumento4 páginas804 PDFJosé Gómez RosalesAún no hay calificaciones
- Algoritmo y Diagrama de Flujo para PromedioDocumento4 páginasAlgoritmo y Diagrama de Flujo para Promediojorge canoAún no hay calificaciones
- Modulo PPR SIGa MEfDocumento138 páginasModulo PPR SIGa MEfFrank Villarreal LaraAún no hay calificaciones
- Guia HTMLDocumento15 páginasGuia HTMLkatherineAún no hay calificaciones
- Foro 1Documento2 páginasForo 1LILIBETH PaterninaAún no hay calificaciones
- Laboratorio Sesion 12Documento9 páginasLaboratorio Sesion 12ElvisvegaAún no hay calificaciones
- Guia Rápida para Conexión VPN A Través de Windows 10 - V1Documento10 páginasGuia Rápida para Conexión VPN A Través de Windows 10 - V1Danny YrAún no hay calificaciones
- Caso Práctico MebDocumento3 páginasCaso Práctico Mebcristhiancusi2100% (1)
- Coordinador Departamento de Sistemas OKDocumento3 páginasCoordinador Departamento de Sistemas OKArmando Muñoz PaezAún no hay calificaciones
- HC S04.s1 - Planilla de InspeccionDocumento24 páginasHC S04.s1 - Planilla de InspeccionYK HFAún no hay calificaciones
- Bajo y Alto NivelDocumento2 páginasBajo y Alto NivelNemadez HdezAún no hay calificaciones
- Mis Chuletas de AndroidDocumento4 páginasMis Chuletas de AndroidnababoAún no hay calificaciones
- C1 Introduccion PARTE 3 2022Documento54 páginasC1 Introduccion PARTE 3 2022Rocio GarcíaAún no hay calificaciones