También podría gustarte
- UntitledDocumento7 páginasUntitledAdonls AndonieAún no hay calificaciones
- Tarea 2 2021-IDocumento2 páginasTarea 2 2021-Iluis vega0% (1)
- Evaluacion Practica Imp. y TopografiaDocumento5 páginasEvaluacion Practica Imp. y Topografiajose manuelAún no hay calificaciones
- Actividad ComplementariaDocumento24 páginasActividad Complementarialuis alejandro molina lopezAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- EvaluacionPractica CauFacDocumento6 páginasEvaluacionPractica CauFacSandra Viviana Gomez MoraAún no hay calificaciones
- Problemas FlexionDocumento4 páginasProblemas FlexionJesus Manzano MartinezAún no hay calificaciones
- Topografia Evaluacion A Distancia Cau Bogota CC 1073165922 Julian PachecoDocumento20 páginasTopografia Evaluacion A Distancia Cau Bogota CC 1073165922 Julian PachecojulianAún no hay calificaciones
- Tarea 9 FisicaDocumento5 páginasTarea 9 FisicaBenjamin VicenteAún no hay calificaciones
- Curso de Lógica Matemática, Matemáticas Discretas o Matemáticas Computacionales Por Hugo Humberto Morales PeñaDocumento196 páginasCurso de Lógica Matemática, Matemáticas Discretas o Matemáticas Computacionales Por Hugo Humberto Morales Peñacienciax100% (1)
- Segunda Tarea C3 2019-IIDocumento8 páginasSegunda Tarea C3 2019-IINia CornejoAún no hay calificaciones
- 4-5 Producto Interno y Sus PropiedadesDocumento6 páginas4-5 Producto Interno y Sus PropiedadesMagdalena MariscalAún no hay calificaciones
- Evaluación Practica Física Mecánica-Andersson Rincón M.Documento50 páginasEvaluación Practica Física Mecánica-Andersson Rincón M.Andersson Andrew Rincon MolinaAún no hay calificaciones
- Análisis VectorialDocumento10 páginasAnálisis Vectorialsaint_erickAún no hay calificaciones
- Pregunta Numero 1 Examen FluidosDocumento34 páginasPregunta Numero 1 Examen FluidosmisaelAún no hay calificaciones
- Laboratorio 2 InformeDocumento12 páginasLaboratorio 2 InformeCrissten blueAún no hay calificaciones
- CAPÍTULO No 6 - INTEGRALES VECTORIALESDocumento12 páginasCAPÍTULO No 6 - INTEGRALES VECTORIALESYeissi HelenAún no hay calificaciones
- Laboratorio de Cargas Electricas y Cuerpos ElectrizadosDocumento21 páginasLaboratorio de Cargas Electricas y Cuerpos Electrizadosjlls21Aún no hay calificaciones
- Coordenadas PolaresDocumento10 páginasCoordenadas PolaresJoel Ramirez100% (1)
- Presentacion InduviasDocumento19 páginasPresentacion InduviasJulian VillarrealAún no hay calificaciones
- Actividad 3 - Grupo 06 - Jhoan Paucar RiverosDocumento7 páginasActividad 3 - Grupo 06 - Jhoan Paucar RiverosandyAún no hay calificaciones
- Evaluación Distancia - AntropologiaDocumento7 páginasEvaluación Distancia - AntropologiaLINDA YULIETH DUARTE ORTEGAAún no hay calificaciones
- FuncionesDocumento9 páginasFuncionesNorma Chahuayo QuispeAún no hay calificaciones
- Flujo Gradualmente Variado - Problemas PDFDocumento2 páginasFlujo Gradualmente Variado - Problemas PDFDulce María Bendezú LicasAún no hay calificaciones
- Movimiento Rectilíneo Bajo Fuerzas ConservativasDocumento2 páginasMovimiento Rectilíneo Bajo Fuerzas Conservativaslenin smith dominguez dominguezAún no hay calificaciones
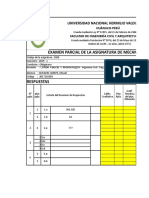
- Examen Mecanica de Suelos Tema 5Documento6 páginasExamen Mecanica de Suelos Tema 5Pepe PizarAún no hay calificaciones
- Informe Geomática BásicaDocumento14 páginasInforme Geomática BásicaPaula CalvoAún no hay calificaciones
- Momento de Inercia.Documento2 páginasMomento de Inercia.Jeremie Chavez CasanovaAún no hay calificaciones
- Ejercicios 1Documento6 páginasEjercicios 1MNela ASAún no hay calificaciones
- Investigación Vectores DuránDocumento12 páginasInvestigación Vectores DuránAlexander DuránAún no hay calificaciones
- TALLERDocumento8 páginasTALLERMaryori SalcedoAún no hay calificaciones
- Factores de Corrección SPTDocumento4 páginasFactores de Corrección SPTCarlos Javier Goez TarraAún no hay calificaciones
- UntitledDocumento8 páginasUntitledLuis David MejiaAún no hay calificaciones
- Fisica Presion Hidrostatica Practica de Laboratorio 2Documento7 páginasFisica Presion Hidrostatica Practica de Laboratorio 2Jefzibá AguileraAún no hay calificaciones
- Parbola 140331152158 Phpapp02Documento37 páginasParbola 140331152158 Phpapp02Cinthya VargasAún no hay calificaciones
- Ejercicios V y ADocumento2 páginasEjercicios V y AKelly TorresAún no hay calificaciones
- Niveleteado para Una TuberiaDocumento14 páginasNiveleteado para Una TuberiaRaul Bernal ValladaresAún no hay calificaciones
- 1 Laboratorio MecanicaDocumento34 páginas1 Laboratorio MecanicaAndres GiraldoAún no hay calificaciones
- Semana N 03-Tema Nº02Documento41 páginasSemana N 03-Tema Nº02edesmitAún no hay calificaciones
- Parcial Micro IS-2009 - SoluciónDocumento3 páginasParcial Micro IS-2009 - SoluciónEduardo Villarroel OlivaresAún no hay calificaciones
- Guía+ +4+C2 PDFDocumento5 páginasGuía+ +4+C2 PDFgabrieliita5p5rezAún no hay calificaciones
- Mecanica de MaterialesDocumento27 páginasMecanica de MaterialesMariia Teresa DiiazAún no hay calificaciones
- Evaluación de RutasDocumento16 páginasEvaluación de RutasValery Escobedo BenitesAún no hay calificaciones
- Informe Práctica 1-TransitoDocumento27 páginasInforme Práctica 1-TransitoFederico Ignacio Rincon LeonAún no hay calificaciones
- Vectores de Posición, Velociad, AceleraciónDocumento7 páginasVectores de Posición, Velociad, AceleraciónfabiolaAún no hay calificaciones
- Problemas ComplementariosDocumento12 páginasProblemas ComplementariosCristianAún no hay calificaciones
- Energía y Vector de PoyntingDocumento3 páginasEnergía y Vector de PoyntingRonald HouseAún no hay calificaciones
- Tif - Calisaya David-Catti GaeliaDocumento73 páginasTif - Calisaya David-Catti GaeliaRosario HerreraAún no hay calificaciones
- Informe N 1 Densidad Jared RamosDocumento8 páginasInforme N 1 Densidad Jared RamosJared Ray RamosAún no hay calificaciones
- Estudio VelocidadesDocumento28 páginasEstudio VelocidadesSebastianAún no hay calificaciones
- Sistema de FuerzasDocumento19 páginasSistema de FuerzasSantiago Sierra100% (1)
- Relatividad Parte 2Documento736 páginasRelatividad Parte 2Junior BaezAún no hay calificaciones
- 2º Informe Fisica IIIDocumento11 páginas2º Informe Fisica IIIegodi00009Aún no hay calificaciones
- Taller Transferencia Estereoscopica - Juan José RuizDocumento14 páginasTaller Transferencia Estereoscopica - Juan José RuizJUAN RUIZ PAEZAún no hay calificaciones
- Pendulo SimpleDocumento9 páginasPendulo SimpleRobinsson Morales AsenciosAún no hay calificaciones
- Informe Laboratorio 4Documento14 páginasInforme Laboratorio 4Rexcord2333% (3)
- Fundamentos de Vectores OpcionDocumento20 páginasFundamentos de Vectores OpcionTavo MeoñoAún no hay calificaciones
- Cuestionario Vectores Terminado (1-25)Documento13 páginasCuestionario Vectores Terminado (1-25)Pablo BotteroAún no hay calificaciones
- Cuestionario Vectores-1Documento24 páginasCuestionario Vectores-1Daiana GomezAún no hay calificaciones
- DivisibilidadDocumento3 páginasDivisibilidadJosue Chuman100% (1)
- Recuperación 8° (Casos de Factorización) (1ra Parte) - Print - QuizizzDocumento2 páginasRecuperación 8° (Casos de Factorización) (1ra Parte) - Print - QuizizzAlí Martinez100% (5)
- Transformada de La Place EjerciciosDocumento55 páginasTransformada de La Place EjerciciosalbertojhmAún no hay calificaciones
- Polinomios EspecialesDocumento14 páginasPolinomios Especialesluis fernando lopez quispeAún no hay calificaciones
- Construcción de La Cicloide AlargadaDocumento12 páginasConstrucción de La Cicloide AlargadaKeyla Gutierrez100% (1)
- Método de Trabajo VirtualDocumento4 páginasMétodo de Trabajo Virtual15854374Aún no hay calificaciones
- Articulo Masa-ResorteDocumento6 páginasArticulo Masa-ResorteSergio Aguilar GómezAún no hay calificaciones
- Método Cuatro Pasos PolyaDocumento2 páginasMétodo Cuatro Pasos PolyaMacarena Reyes BravoAún no hay calificaciones
- Programación de Décimo 2023 Tercer PeriodoDocumento2 páginasProgramación de Décimo 2023 Tercer PeriodoYair CastroAún no hay calificaciones
- Modelo Matemático Simple PARACAIDISTADocumento22 páginasModelo Matemático Simple PARACAIDISTAcarlosmenAún no hay calificaciones
- Introduccion A La Logica 2Documento394 páginasIntroduccion A La Logica 210812454100% (1)
- Progresion GeometricaDocumento4 páginasProgresion GeometricaJose Luis Moreno VegaAún no hay calificaciones
- Curvas QVDocumento5 páginasCurvas QVjavierAún no hay calificaciones
- Rubrica EcuacionesDocumento2 páginasRubrica EcuacionesRocio Antezana100% (1)
- Paradigmas de InvestigacionDocumento95 páginasParadigmas de InvestigacionJannet Marcela Gavilanes Martinez100% (1)
- San Francisco Xavier AuxiliaturaDocumento7 páginasSan Francisco Xavier AuxiliaturaBeimar Miguel CeronAún no hay calificaciones
- Preguntas MaratonDocumento5 páginasPreguntas Maratonwgcgf9rhs8Aún no hay calificaciones
- EVALUACIÓN de MATEMÁTICA 8º BÁSICO 12 de AbrilDocumento3 páginasEVALUACIÓN de MATEMÁTICA 8º BÁSICO 12 de AbrilalfemoralesAún no hay calificaciones
- TEMA 12 Circunferencias y CirculosDocumento8 páginasTEMA 12 Circunferencias y CirculosGuaci ClavijoAún no hay calificaciones
- AA1 - Elizabeth HuertaDocumento3 páginasAA1 - Elizabeth HuertaElizabeth HuertaAún no hay calificaciones
- 1.ecuaciones Cuadráticas IDocumento13 páginas1.ecuaciones Cuadráticas IJONATHAN MARTINEZAún no hay calificaciones
- Deber 6, EDO, Transformación de LaplaceDocumento7 páginasDeber 6, EDO, Transformación de LaplaceAngee Jeon ♡Aún no hay calificaciones
- Elaboración de Los Instrumentos de Recolección de DatosDocumento3 páginasElaboración de Los Instrumentos de Recolección de DatosGustavo Valero ChoqueAún no hay calificaciones
- Inf 5 CDDocumento2 páginasInf 5 CDBruno EspinozaAún no hay calificaciones
- S10 DerivadasImplicitaDeFuncionesEnVVDocumento38 páginasS10 DerivadasImplicitaDeFuncionesEnVVCRISTIAN ALEXIS PALOMINO LOPEZAún no hay calificaciones
- ARITMETICADocumento31 páginasARITMETICAAbimael Guzman FloresAún no hay calificaciones
- Evaluacion 9° - Componenetes Rectangulares de Un VectorDocumento2 páginasEvaluacion 9° - Componenetes Rectangulares de Un Vectorlizeth castañoAún no hay calificaciones
- Teorema de Pitot: Cuadrilátero Convexo Henri Pitot Jakob SteinerDocumento43 páginasTeorema de Pitot: Cuadrilátero Convexo Henri Pitot Jakob SteinerMaria Concepcion100% (1)
- Zarate, Sebastian - Espacios de HardyDocumento35 páginasZarate, Sebastian - Espacios de HardySolanyi TejadaAún no hay calificaciones
- Master Simce Matem Ticas - PDF MUY BUENODocumento167 páginasMaster Simce Matem Ticas - PDF MUY BUENONatali RiosAún no hay calificaciones