También podría gustarte
- Informe-2 Equipos de Radiofrecuencia y RuidoDocumento4 páginasInforme-2 Equipos de Radiofrecuencia y RuidoDiego Felipe Silva VarelaAún no hay calificaciones
- M Comunicaciones Digitales 2021-1Documento88 páginasM Comunicaciones Digitales 2021-1ALEX5154411Aún no hay calificaciones
- Ejercicios Modulacion DigitalDocumento2 páginasEjercicios Modulacion DigitalAndres Rich ValenzuelaAún no hay calificaciones
- Labo3 Tele2Documento8 páginasLabo3 Tele2Cesar Terrazas VillarroelAún no hay calificaciones
- Ex de Entrada Ctos 2 2021 IIDocumento1 páginaEx de Entrada Ctos 2 2021 IICanalDTodoUnPoco PCAún no hay calificaciones
- Modulacion (PAM, PCM)Documento7 páginasModulacion (PAM, PCM)Julio PerezAún no hay calificaciones
- Lab Antenas Exp 1Documento12 páginasLab Antenas Exp 1DiegoGutierrezCondorAún no hay calificaciones
- Canal AWGNDocumento3 páginasCanal AWGNJkyuu Chen100% (1)
- PrbsDocumento4 páginasPrbsLeandro Josue GarciaAún no hay calificaciones
- Examen Comunicaciones DigitalesDocumento2 páginasExamen Comunicaciones DigitalesJessi CruelAún no hay calificaciones
- Labo N°1 - Com. AnalógicaDocumento25 páginasLabo N°1 - Com. AnalógicaTakeshi Cardenas NunhezAún no hay calificaciones
- Practica31 InalambricasDocumento8 páginasPractica31 InalambricasFrank Guamán100% (1)
- Sistema de Control DigitalDocumento10 páginasSistema de Control DigitalYEFERSONAún no hay calificaciones
- Exs Finales Sist Radio y TVDocumento7 páginasExs Finales Sist Radio y TVVictorAún no hay calificaciones
- Graficos de Bode Con PSpiceDocumento11 páginasGraficos de Bode Con PSpicejuan ramirezAún no hay calificaciones
- Unidad 1 LineasDocumento46 páginasUnidad 1 LineasFabian Swift Grant Ramos0% (1)
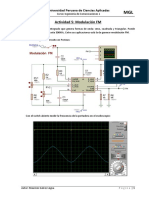
- Actividad 5 Modulacion FMDocumento7 páginasActividad 5 Modulacion FMJohanz Roque100% (1)
- Capítulo 3 PDFDocumento66 páginasCapítulo 3 PDFAngie MontoyaAún no hay calificaciones
- Laboratorio - SIMULINK QAM BPSK PDFDocumento15 páginasLaboratorio - SIMULINK QAM BPSK PDFLuis LópezAún no hay calificaciones
- Laboratorio PCM 2Documento4 páginasLaboratorio PCM 2Checho LopezAún no hay calificaciones
- Laboratorio - ConvertidoresDocumento7 páginasLaboratorio - ConvertidoresHugoJoséMirandaRodriguezAún no hay calificaciones
- Laboratorio de Antenas 2018Documento56 páginasLaboratorio de Antenas 2018Edipol Nonajulca PangalimaAún no hay calificaciones
- Informe de La Práctica de Laboratorio N2Documento3 páginasInforme de La Práctica de Laboratorio N2William PintoAún no hay calificaciones
- Lab04 Mod Am LabviewDocumento15 páginasLab04 Mod Am LabviewLC LyonAún no hay calificaciones
- Modulador y Demodulador Am Practica de LabDocumento3 páginasModulador y Demodulador Am Practica de LabRihe CaAún no hay calificaciones
- Informe Previo 5 Analisis TemporalDocumento9 páginasInforme Previo 5 Analisis TemporalLuisCabreraOroscoAún no hay calificaciones
- Objetivos de Los SODocumento8 páginasObjetivos de Los SORey ArturoAún no hay calificaciones
- Informe 3 Sistemas de Radiocomunicaciones 1Documento9 páginasInforme 3 Sistemas de Radiocomunicaciones 1JADIRA GERALDIN PACHAS VALDEZAún no hay calificaciones
- 1.1.2. Bloques Esenciales de Un AutómataDocumento2 páginas1.1.2. Bloques Esenciales de Un AutómataJosé LuisAún no hay calificaciones
- RadioDocumento5 páginasRadioceleste claroAún no hay calificaciones
- Informe Proyecto Sistemas DinamicosDocumento6 páginasInforme Proyecto Sistemas DinamicosRichard Eduardo Duarte ZuñigaAún no hay calificaciones
- Practica 4 Control Selectivo Seguridad 21Documento8 páginasPractica 4 Control Selectivo Seguridad 21Fernando Gutierrez OportoAún no hay calificaciones
- PCM24Documento3 páginasPCM24Carolina RodriguezAún no hay calificaciones
- Informe Tarea Academica Briceño Posada JoseDocumento25 páginasInforme Tarea Academica Briceño Posada JoseJose Eduardo BriceñoAún no hay calificaciones
- Capitulo2 FTTHDocumento15 páginasCapitulo2 FTTHRoy Erick Gamio AguileraAún no hay calificaciones
- Contador 7490 y Decodificador 7447 PracticaDocumento3 páginasContador 7490 y Decodificador 7447 Practicavictormorales21Aún no hay calificaciones
- FUNCIONES DE DISTRIBUCIÓN DE PROBABILIDAD Con MatlabDocumento23 páginasFUNCIONES DE DISTRIBUCIÓN DE PROBABILIDAD Con MatlabRichard Frank ChoqueAún no hay calificaciones
- Práctica 1 Modulacion PCM y DPCMDocumento7 páginasPráctica 1 Modulacion PCM y DPCMPedroJavierPerdomoJuarezAún no hay calificaciones
- Modulacion FSK (Diego Sanchez)Documento3 páginasModulacion FSK (Diego Sanchez)Diego Alonso SanchezAún no hay calificaciones
- Informe Labo7Documento6 páginasInforme Labo7Emanuel CrespoAún no hay calificaciones
- Erlang C PDFDocumento11 páginasErlang C PDFmaickolnpAún no hay calificaciones
- Guía Laboratorio - Antenas Dipolo PDFDocumento12 páginasGuía Laboratorio - Antenas Dipolo PDFCamila VasquezAún no hay calificaciones
- Marquesina Con GalDocumento2 páginasMarquesina Con GalJesus GarridoAún no hay calificaciones
- Informe OFDMDocumento15 páginasInforme OFDMEdwin VelasteguiAún no hay calificaciones
- Formato Ieee InformeDocumento5 páginasFormato Ieee InformeSamuel AruquipaAún no hay calificaciones
- DPCMDocumento11 páginasDPCMRicardo salasAún no hay calificaciones
- Programa para Llenado de TanquesDocumento16 páginasPrograma para Llenado de TanquesDavidVX25Aún no hay calificaciones
- Guía Básica de Laboratorio Virtual en LabviewDocumento58 páginasGuía Básica de Laboratorio Virtual en LabviewEvale Emivane ValeAún no hay calificaciones
- Antenas UHF y MicroondasDocumento12 páginasAntenas UHF y MicroondasTutorial Html100% (1)
- Clase 6. ADC y MemoriaDocumento13 páginasClase 6. ADC y MemoriaSergio GuerreroAún no hay calificaciones
- Lab 8. Adquisicon de Señales Mediante Interfaz Grafica en MATLAB y Puertos ADC de La FPGA - BASYS 3Documento6 páginasLab 8. Adquisicon de Señales Mediante Interfaz Grafica en MATLAB y Puertos ADC de La FPGA - BASYS 3Roxsana ZapataAún no hay calificaciones
- Regulacion de Intensidad de Brillo Con Led PicDocumento7 páginasRegulacion de Intensidad de Brillo Con Led PicDavid Shure Xiv100% (1)
- Telecomunicaciones II: 4ta Práctica CalificadaDocumento14 páginasTelecomunicaciones II: 4ta Práctica CalificadaMiguel Angel Pajuelo VillanuevaAún no hay calificaciones
- Laboratorio 3 Elt3890-2-2013Documento8 páginasLaboratorio 3 Elt3890-2-2013JuanRiosAjelAún no hay calificaciones
- Sensor de Humedad RelativaDocumento11 páginasSensor de Humedad RelativaDiana Martinez SifuentesAún no hay calificaciones
- Guia 4 PDFDocumento16 páginasGuia 4 PDFLUIS EDUARDO QUISPE MENDOZAAún no hay calificaciones
- Proyecto Con Microcontrolador Pic16f628a1Documento13 páginasProyecto Con Microcontrolador Pic16f628a1Omar Ramirez HerreraAún no hay calificaciones
- Informe Practica 4 PDFDocumento9 páginasInforme Practica 4 PDFFranco Pérez MuñozAún no hay calificaciones
- Laboratorio - 2 UsartDocumento4 páginasLaboratorio - 2 UsartJuan PerezAún no hay calificaciones
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaAún no hay calificaciones
- Project CharterDocumento5 páginasProject CharterElvis Ortega LandeoAún no hay calificaciones
- Manual de Instrucciones de RelevadoresDocumento24 páginasManual de Instrucciones de RelevadoresNookoty John100% (1)
- Alfabetizacion Taller 2 ElectivoDocumento12 páginasAlfabetizacion Taller 2 ElectivoRozasReyesGermánAún no hay calificaciones
- 01 - Tpiii - Informe - Bumper BubblesDocumento31 páginas01 - Tpiii - Informe - Bumper BubblesstefaniAún no hay calificaciones
- Memoria JLOPfinal PDFDocumento70 páginasMemoria JLOPfinal PDFJuan Carlos ZaletaAún no hay calificaciones
- Evidencia 4 Trazabilidad Pollos PLQDocumento3 páginasEvidencia 4 Trazabilidad Pollos PLQJennifer ZamoraAún no hay calificaciones
- Diseño de Circuitos NeumáticosDocumento3 páginasDiseño de Circuitos NeumáticosVictor Manuel Gomez MorenoAún no hay calificaciones
- Manual YamahaDocumento20 páginasManual Yamahajose cordova100% (1)
- UD I Trimestre 1°Documento4 páginasUD I Trimestre 1°Nelvin TaipeAún no hay calificaciones
- Estanterias Autoportantes de Un Sistema Automatizado 1Documento5 páginasEstanterias Autoportantes de Un Sistema Automatizado 1Diego ChunAún no hay calificaciones
- PROYECTODocumento39 páginasPROYECTOCristian Cueva SotoAún no hay calificaciones
- Prototipo de Sistema Experto para El Mantenimiento Y La Reparación de HardwareDocumento12 páginasPrototipo de Sistema Experto para El Mantenimiento Y La Reparación de HardwareAlexander Rivera VelasquezAún no hay calificaciones
- Act Tema 1 Guerra SODocumento14 páginasAct Tema 1 Guerra SOAndres MendezAún no hay calificaciones
- Prefijos y Sufijos Lector de CódigosDocumento4 páginasPrefijos y Sufijos Lector de CódigosMichael PorrasAún no hay calificaciones
- NIA 500 - Evidencia de AuditoriaDocumento12 páginasNIA 500 - Evidencia de AuditoriaArely DiazAún no hay calificaciones
- Apostemos Que Me CasoDocumento7 páginasApostemos Que Me CasoBrayan Picoy ValerioAún no hay calificaciones
- Paso 3Documento8 páginasPaso 3Franyer LopezAún no hay calificaciones
- Manual de Office ScanDocumento552 páginasManual de Office Scanarcangel_0024Aún no hay calificaciones
- Ejercicios Prog DinamDocumento12 páginasEjercicios Prog DinammaarcoAún no hay calificaciones
- Cuadro Comparativo de Herramientas Digitales. EvidenciaDocumento9 páginasCuadro Comparativo de Herramientas Digitales. EvidenciaBetsyA.Domínguez100% (1)
- Analisis FodaDocumento2 páginasAnalisis FodaEduin HernandezAún no hay calificaciones
- Experiencia Logico MatematicaDocumento17 páginasExperiencia Logico MatematicaEnoc GutierrezAún no hay calificaciones
- Puente Grua GaamaDocumento2 páginasPuente Grua GaamaNilson Cardenas MartinezAún no hay calificaciones
- Valvulas VamexDocumento7 páginasValvulas VamexAna Miguel TorresAún no hay calificaciones
- Deber de Informática 2do QuimestresDocumento11 páginasDeber de Informática 2do Quimestressallomari30Aún no hay calificaciones
- Por Qué Son Importantes Los Instrumentos de Diagnóstico en La Optimización de Los Procesos de Producción de CompetenciasDocumento2 páginasPor Qué Son Importantes Los Instrumentos de Diagnóstico en La Optimización de Los Procesos de Producción de Competenciasdaneys308572Aún no hay calificaciones
- Sensor UltrasónicoDocumento5 páginasSensor UltrasónicoRoberto De FariaAún no hay calificaciones
- Tecnología A Tu Alcance: Informe TecnicoDocumento2 páginasTecnología A Tu Alcance: Informe TecnicoAnibal SorianoAún no hay calificaciones
- Auditoria de AplicacionesDocumento7 páginasAuditoria de AplicacionesJose H.Aún no hay calificaciones
- 1 Prueba Math 6°Documento1 página1 Prueba Math 6°Consuelo Gomez OrtizAún no hay calificaciones