También podría gustarte
- Mov. Pendular. Laboratorio VirtualDocumento8 páginasMov. Pendular. Laboratorio VirtualMoises CastillaAún no hay calificaciones
- Informe Final ResistenciasDocumento11 páginasInforme Final ResistenciasBruNo LopezAún no hay calificaciones
- Fuerza Coriolis VTUDocumento4 páginasFuerza Coriolis VTUTrenado Utrera VíctorAún no hay calificaciones
- Laboratorio 6 Calor Específico de Sólidos 1Documento28 páginasLaboratorio 6 Calor Específico de Sólidos 1Bryan Roberto Cruz FloresAún no hay calificaciones
- Informe Laboratorio MRU y MRUVDocumento8 páginasInforme Laboratorio MRU y MRUVJuan Carlos Flores FloresAún no hay calificaciones
- Informe 6 Medición de Fuerzas y Equilibrio EstáticoDocumento31 páginasInforme 6 Medición de Fuerzas y Equilibrio EstáticoCarbajal Javier50% (6)
- Integral Múltiple Con Software Maple. Ramírez - Hernández - Luis.Documento17 páginasIntegral Múltiple Con Software Maple. Ramírez - Hernández - Luis.LGUSTAVORHAún no hay calificaciones
- Mecanica Racional ModernaDocumento62 páginasMecanica Racional ModernaMeriel Coronado Covo100% (1)
- Teoría Trabajo y EnergíaDocumento41 páginasTeoría Trabajo y EnergíaAntonio Angel Patricio GarcíaAún no hay calificaciones
- Mecánica RelativistaDocumento13 páginasMecánica Relativistakenya78Aún no hay calificaciones
- Silabo de Dinamica - 2016-II - Ingenieria CivilDocumento8 páginasSilabo de Dinamica - 2016-II - Ingenieria CivilElmer Mesias Cabrera Chavarri0% (1)
- Mediciones y Calculo de Errores PDFDocumento10 páginasMediciones y Calculo de Errores PDFAlain VelizAún no hay calificaciones
- Lab.#3 Péndulo Físico PDFDocumento1 páginaLab.#3 Péndulo Físico PDFAndrés LópezAún no hay calificaciones
- Lab 5 QuímicaDocumento5 páginasLab 5 QuímicaLEONARDO BRYAN PONCE GARCIAAún no hay calificaciones
- Guia de Laboratorio Física PDFDocumento68 páginasGuia de Laboratorio Física PDFBrayan SHAún no hay calificaciones
- Integrales de LineaDocumento12 páginasIntegrales de LineaNatali AlvarezAún no hay calificaciones
- Laboratorio Movimiento Armónico SimpleDocumento15 páginasLaboratorio Movimiento Armónico SimpleAngel MarinAún no hay calificaciones
- Laboratorio 4 Fisica1Documento9 páginasLaboratorio 4 Fisica1franklinAún no hay calificaciones
- Lab 05 GasesDocumento7 páginasLab 05 Gasesronaldo cotrinaAún no hay calificaciones
- Informe #4 Movimiento de Una ParticulaDocumento20 páginasInforme #4 Movimiento de Una Particulaalexcanciobedon50% (2)
- Trabajo NDocumento12 páginasTrabajo NA.GAún no hay calificaciones
- Condicional SimpleDocumento15 páginasCondicional SimpleMatheo Osorio RojasAún no hay calificaciones
- Calor EspecificoDocumento9 páginasCalor EspecificoJhonatan MontalvoAún no hay calificaciones
- LABORATORIO FISICA INFORME #2 Analisis de DatosDocumento7 páginasLABORATORIO FISICA INFORME #2 Analisis de DatosDiego Villarrelax Malvaceda100% (2)
- Lab 7 Campo Magnetico de Un SolenoideDocumento8 páginasLab 7 Campo Magnetico de Un SolenoidemiguelAún no hay calificaciones
- Laboratorio MruDocumento16 páginasLaboratorio Mrusealecas100% (2)
- Informe de Laboratorio 3 - Presion ProfundidadDocumento10 páginasInforme de Laboratorio 3 - Presion ProfundidadJosqui MarinAún no hay calificaciones
- Investigando Un Fenomeno de La NaturalezaDocumento8 páginasInvestigando Un Fenomeno de La NaturalezaRolando BecerraAún no hay calificaciones
- Funciones VectorialesDocumento12 páginasFunciones VectorialesErik VillegasAún no hay calificaciones
- Trabajo Cuerpo Rigido Jose PerezDocumento23 páginasTrabajo Cuerpo Rigido Jose PerezJosé PérezAún no hay calificaciones
- Física-Informe 5 Segunda Ley de NewtonDocumento4 páginasFísica-Informe 5 Segunda Ley de NewtonCarlos AndrésAún no hay calificaciones
- Campos Vectoriales y AplicacionesDocumento11 páginasCampos Vectoriales y AplicacionesrogerAún no hay calificaciones
- Informe Fisica 3, Movimiento de ProyectilesDocumento5 páginasInforme Fisica 3, Movimiento de ProyectilesBriRozAún no hay calificaciones
- Equipos de NivelaciónDocumento4 páginasEquipos de NivelaciónAldahir TorresAún no hay calificaciones
- Los 5 Laboratorios de Fisica 1 ValdiviaDocumento63 páginasLos 5 Laboratorios de Fisica 1 ValdiviaMONICA ISABEL CUESTAS ESPINOZAAún no hay calificaciones
- Informe 2 Laboratorio Fisica IDocumento35 páginasInforme 2 Laboratorio Fisica IAlejandro LaraAún no hay calificaciones
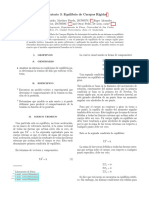
- Laboratorio 3 Equilibrio de Cuerpos RigidosDocumento5 páginasLaboratorio 3 Equilibrio de Cuerpos RigidosKevin GuerraAún no hay calificaciones
- Reporte Distribución NormalDocumento6 páginasReporte Distribución NormalGiovanna Zapata LeoneAún no hay calificaciones
- Fisica 1 Laboratorio URPDocumento13 páginasFisica 1 Laboratorio URPIsabel CárdenasAún no hay calificaciones
- 2 PDFDocumento7 páginas2 PDFdayerAún no hay calificaciones
- Linealizacion EquivalenteDocumento25 páginasLinealizacion EquivalenteJessy Paola CasaAún no hay calificaciones
- Trabajo y EnergiaDocumento16 páginasTrabajo y EnergiaAnder MAún no hay calificaciones
- Centro de MasasDocumento14 páginasCentro de MasasUnknow.100% (1)
- Aplicacion de La I.D. en La FisicaDocumento13 páginasAplicacion de La I.D. en La FisicaAntony Velazco MacedoAún no hay calificaciones
- PDF Teorema de Green - CompressDocumento23 páginasPDF Teorema de Green - CompressAldo MerchanAún no hay calificaciones
- Pendulo Fisico y Teorema de SteinerDocumento20 páginasPendulo Fisico y Teorema de SteinerRonald ChaiñaAún no hay calificaciones
- Cartilla 2 - Cinemática de La Particula - 2015Documento6 páginasCartilla 2 - Cinemática de La Particula - 2015Ezequiel PasqualiAún no hay calificaciones
- Equilibrio MecanicoDocumento5 páginasEquilibrio MecanicoMaik BarbozaAún no hay calificaciones
- Conceptos de MicroeconomíaDocumento25 páginasConceptos de MicroeconomíaJHONATAN JORGE LUIS PEREDO GONZALES100% (1)
- Informe MruDocumento7 páginasInforme MruRICHAR ESTIVEN ANASTACIO TIMANAAún no hay calificaciones
- LAB5 Movimiento de Un ProyectilDocumento10 páginasLAB5 Movimiento de Un ProyectilMiguel Llallihuaman CalderonAún no hay calificaciones
- Solucionario de Exmane de Recuperacion de Mecanica de MaterialesDocumento7 páginasSolucionario de Exmane de Recuperacion de Mecanica de MaterialesEdwin A. Juarez MarchenaAún no hay calificaciones
- Momento AngularDocumento11 páginasMomento AngularArturo Padilla100% (1)
- Práctica 1 Física IIDocumento8 páginasPráctica 1 Física IISamuel MartinezAún no hay calificaciones
- Resumen de Fórmulas - Cálculo IIDocumento2 páginasResumen de Fórmulas - Cálculo IIFrnzAún no hay calificaciones
- Volumenes de Solidos Por RevoluciónDocumento8 páginasVolumenes de Solidos Por RevoluciónGusTavoNiievezAún no hay calificaciones
- TrabajoDocumento17 páginasTrabajoLuz Esther Vásquez CubasAún no hay calificaciones
- Informe Laboratorio de Equlibrio de Fuerzas Practica 01ultimoDocumento12 páginasInforme Laboratorio de Equlibrio de Fuerzas Practica 01ultimoluis666555100% (1)
- MF0624_1 - Técnicas básicas de electricidad de vehículosDe EverandMF0624_1 - Técnicas básicas de electricidad de vehículosCalificación: 5 de 5 estrellas5/5 (2)
- Diseño Mecanico EmpiricoDocumento18 páginasDiseño Mecanico Empiricojimmy AndresAún no hay calificaciones
- Informe SecadorDocumento24 páginasInforme SecadorAdriana Estefania Tomalá GómezAún no hay calificaciones
- 1.4. Esfuerzos de AplastamientoDocumento3 páginas1.4. Esfuerzos de AplastamientoArmando LeijaAún no hay calificaciones
- ESCALAS TERMOMÉTRICAS DécimoDocumento3 páginasESCALAS TERMOMÉTRICAS DécimoKarel Dajhana Acuña AcuñaAún no hay calificaciones
- 1 - Propiedades de Los FluidosDocumento26 páginas1 - Propiedades de Los Fluidoschristianyankel0% (1)
- Acelerador de partículasPERRASDocumento7 páginasAcelerador de partículasPERRASAlberto QCAún no hay calificaciones
- Tarea 1 - Reconocimiento de Imágenes - Taller PresaberDocumento35 páginasTarea 1 - Reconocimiento de Imágenes - Taller PresaberEduardo LopezAún no hay calificaciones
- Celdas y SensoredDocumento27 páginasCeldas y SensoredAngelica PortilloAún no hay calificaciones
- INFORME DEL LAB de TERCALDERA O CAMARA DE COMBUSTION USANDO COMBUSTIBLE GASEOSOMO II N - 5 Combustible Gas 1 para ImprimirDocumento17 páginasINFORME DEL LAB de TERCALDERA O CAMARA DE COMBUSTION USANDO COMBUSTIBLE GASEOSOMO II N - 5 Combustible Gas 1 para ImprimirEduardo Manuel Puchuri MamaniAún no hay calificaciones
- ITM - LUBRICACIÓN VERSION 1 Febrero 2010Documento190 páginasITM - LUBRICACIÓN VERSION 1 Febrero 2010CRISTIAN ALEXANDER SALDANA GARZONAún no hay calificaciones
- Practica #6 Presión Sobre SuperficiesDocumento12 páginasPractica #6 Presión Sobre SuperficiesJonathan CarlinAún no hay calificaciones
- Compresión Básica APATG, Técnicos Operadores de Motocompresores PDFDocumento77 páginasCompresión Básica APATG, Técnicos Operadores de Motocompresores PDFAlfredoAún no hay calificaciones
- Jose RivadeneiraDocumento50 páginasJose RivadeneiraJose AntonioAún no hay calificaciones
- Momento Curvatura Modelo ParkDocumento7 páginasMomento Curvatura Modelo ParkCarlos Alberto Acuña AsenjoAún no hay calificaciones
- Fisica 1ro Bgu-U4-C4 IiqDocumento5 páginasFisica 1ro Bgu-U4-C4 IiqFRANKLIN SAGÑAYAún no hay calificaciones
- Unidad 4 Pavimentos-Luis Vicente Del Angel A.Documento127 páginasUnidad 4 Pavimentos-Luis Vicente Del Angel A.luis vicente daaAún no hay calificaciones
- Informe 2da Muestra de Estructuras IsostáticasDocumento3 páginasInforme 2da Muestra de Estructuras IsostáticasJuan Esteban CastellanosAún no hay calificaciones
- Problemas CinematicaDocumento3 páginasProblemas CinematicaL Arturo RodriguezAún no hay calificaciones
- Psu Ciencias Ondas y LuzDocumento3 páginasPsu Ciencias Ondas y LuzDixie FloresAún no hay calificaciones
- Upse Tip 2020 0017Documento47 páginasUpse Tip 2020 0017Emiliano PGarciaAún no hay calificaciones
- Sesión de Clase Sistema de Refrigeración MCI Ingeniero Carlos Ulloa MorenoDocumento31 páginasSesión de Clase Sistema de Refrigeración MCI Ingeniero Carlos Ulloa MorenoAlbert Oscar Carrizales BriceñoAún no hay calificaciones
- Fundamentos de VibracionesDocumento17 páginasFundamentos de VibracionesMoisés Vázquez ToledoAún no hay calificaciones
- G01. Resistencia de Materiales. Esfuerzos y Solicitaciones en EstructurasDocumento20 páginasG01. Resistencia de Materiales. Esfuerzos y Solicitaciones en EstructurasNikolas VasquezAún no hay calificaciones
- Flujo Unidimensional Del Agua A Través Del SueloDocumento35 páginasFlujo Unidimensional Del Agua A Través Del Sueloj.rudy cabezasAún no hay calificaciones
- Grados de LibertadDocumento5 páginasGrados de LibertadJohn VismokeAún no hay calificaciones
- Sesion #03Documento29 páginasSesion #03monicaAún no hay calificaciones
- Clase 1Documento54 páginasClase 1Naida RamosAún no hay calificaciones
- Diseño de Un Tanque de Almacenamiento de Petróleo de 10 000 Galones Mediante El Uso Del Método de Elementos Finitos (MEF)Documento109 páginasDiseño de Un Tanque de Almacenamiento de Petróleo de 10 000 Galones Mediante El Uso Del Método de Elementos Finitos (MEF)Pablo Alexis NavarroAún no hay calificaciones
- Método de RotacionesDocumento6 páginasMétodo de RotacionesMaria Victoria Andara0% (1)
- 3 1CDocumento4 páginas3 1CCristiann TejedaAún no hay calificaciones