También podría gustarte
- Modelo Matemático de Un Motor DC en SerieDocumento3 páginasModelo Matemático de Un Motor DC en SerieMayrita MopositaAún no hay calificaciones
- Respuesta de Un Sistema de Ecuaciones A Través de FiltradoDocumento9 páginasRespuesta de Un Sistema de Ecuaciones A Través de FiltradoEduardo PastorAún no hay calificaciones
- Aplicaciones de La Definición de La Transformada de LaplaceDocumento10 páginasAplicaciones de La Definición de La Transformada de LaplaceEduardo PastorAún no hay calificaciones
- Análisis de Sistemas Lineales A Partir de Variables de EstadoDocumento10 páginasAnálisis de Sistemas Lineales A Partir de Variables de EstadoEduardo PastorAún no hay calificaciones
- Análisis de Función de Transferencia de Tercer OrdenDocumento7 páginasAnálisis de Función de Transferencia de Tercer OrdenEduardo PastorAún no hay calificaciones
- Convolución de Funciones y Evaluación Por Métodos Numéricos y La Transformada de LaplaceDocumento13 páginasConvolución de Funciones y Evaluación Por Métodos Numéricos y La Transformada de LaplaceEduardo PastorAún no hay calificaciones
- Interpretación de Polos y Ceros de Una Función de TransferenciaDocumento16 páginasInterpretación de Polos y Ceros de Una Función de TransferenciaEduardo PastorAún no hay calificaciones
- Aplicaciones de La Definición de La Transformada de LaplaceDocumento10 páginasAplicaciones de La Definición de La Transformada de LaplaceEduardo PastorAún no hay calificaciones
- Cota de Funciones en El TiempoDocumento10 páginasCota de Funciones en El TiempoEduardo PastorAún no hay calificaciones
- Tarea4 CLSMDocumento15 páginasTarea4 CLSMEduardo PastorAún no hay calificaciones
- Dinámica CartesianaDocumento10 páginasDinámica CartesianaEduardo PastorAún no hay calificaciones
- Cota de Funciones en El TiempoDocumento10 páginasCota de Funciones en El TiempoEduardo PastorAún no hay calificaciones
- Control de Trayectoria PDDocumento14 páginasControl de Trayectoria PDEduardo PastorAún no hay calificaciones
- MapaDocumento1 páginaMapaEduardo PastorAún no hay calificaciones
- Análisis de Estabilidad de Los Sistemas No Lineales de Lorenz, Lü y ChenDocumento14 páginasAnálisis de Estabilidad de Los Sistemas No Lineales de Lorenz, Lü y ChenEduardo PastorAún no hay calificaciones
- Tarea 5 Control ModernoDocumento2 páginasTarea 5 Control ModernoEduardo PastorAún no hay calificaciones
- Controlabilidad de Circuito RLCDocumento2 páginasControlabilidad de Circuito RLCEduardo PastorAún no hay calificaciones
- Convenio de Universidades para MovilidadDocumento8 páginasConvenio de Universidades para MovilidadEduardo PastorAún no hay calificaciones
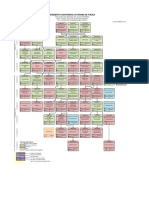
- Copia de Mapa Mecatronica Plan MumDocumento2 páginasCopia de Mapa Mecatronica Plan MumEduardo PastorAún no hay calificaciones
- Práctica 6 y 7 Sistemas RadiantesDocumento18 páginasPráctica 6 y 7 Sistemas RadiantesEduardo PastorAún no hay calificaciones
- Práctica 5 ComunicacionesDocumento14 páginasPráctica 5 ComunicacionesEduardo PastorAún no hay calificaciones
- Principios Del Juego SumobotsDocumento5 páginasPrincipios Del Juego SumobotsEduardo PastorAún no hay calificaciones
- Práctica 2 InterfacesDocumento1 páginaPráctica 2 InterfacesEduardo PastorAún no hay calificaciones
- 6 Sombreros para PensarDocumento13 páginas6 Sombreros para PensarEduardo PastorAún no hay calificaciones
- Inversor 4013Documento6 páginasInversor 4013José LuisAún no hay calificaciones
- Inversor 4013Documento6 páginasInversor 4013José LuisAún no hay calificaciones
- 3) Funciones de TransferenciaDocumento49 páginas3) Funciones de Transferenciavictor fernandezAún no hay calificaciones
- Unidad Repaso Control 2Documento148 páginasUnidad Repaso Control 2Jorge Alejandro Sanchez Juarez100% (1)
- Sistema de Segundo OrdenDocumento13 páginasSistema de Segundo OrdenAlex Javier Diaz MillanAún no hay calificaciones
- Tema 3 - Representación Externa de SistemasDocumento43 páginasTema 3 - Representación Externa de SistemasOskarAún no hay calificaciones
- CTM Ejemplo - Péndulo Invertido - Modelación PDFDocumento8 páginasCTM Ejemplo - Péndulo Invertido - Modelación PDFWilson Barco MAún no hay calificaciones
- Bloqueador de Orden UnoDocumento6 páginasBloqueador de Orden UnoEnrique Huayra SumariaAún no hay calificaciones
- LAB03 - Software de Simulación para Control (2023-2)Documento28 páginasLAB03 - Software de Simulación para Control (2023-2)Angelo Reyes G.Aún no hay calificaciones
- DarioG. InformeDocumento7 páginasDarioG. InformeDario GuevaraAún no hay calificaciones
- E2692 3P217Documento2 páginasE2692 3P217Miguel Angel LopezAún no hay calificaciones
- Tarea 9 Función de TransferenciaDocumento4 páginasTarea 9 Función de TransferenciaEdwinGioMoralesAún no hay calificaciones
- Funcion de Transferencia de Un Motor de C.D.Documento4 páginasFuncion de Transferencia de Un Motor de C.D.ɛɗuɑʀɗѳ cѳpɑʆcuɑAún no hay calificaciones
- Modelado Matematico de Sistema FisicosDocumento39 páginasModelado Matematico de Sistema FisicosJorge QuijanoAún no hay calificaciones
- Modelo Matematico de Engranajes PDFDocumento36 páginasModelo Matematico de Engranajes PDFjhonAún no hay calificaciones
- Examen Parcial de Automatismo 01T 2021N SolucionarioDocumento2 páginasExamen Parcial de Automatismo 01T 2021N SolucionarioMarco Santiago100% (1)
- Deber Modelacion MatematicaDocumento15 páginasDeber Modelacion MatematicaJuan C. FreireAún no hay calificaciones
- Examen 2-Parte A (28-10-2019)Documento2 páginasExamen 2-Parte A (28-10-2019)Andrea Rojas VargasAún no hay calificaciones
- Función de TransferenciaDocumento17 páginasFunción de Transferenciamelany haro100% (1)
- Analisis de La Respuesta TransitoriaDocumento17 páginasAnalisis de La Respuesta TransitoriaEruiza35Aún no hay calificaciones
- Práctica N°5 Laboratorio de Diseño de Sistemas de ControlDocumento13 páginasPráctica N°5 Laboratorio de Diseño de Sistemas de ControlLeonardo Alejandro Vargas TorrezAún no hay calificaciones
- Sistemas Dinamicos 2do OrdenDocumento3 páginasSistemas Dinamicos 2do OrdenJheison MartinezAún no hay calificaciones
- Sistema de Primer OrdenDocumento4 páginasSistema de Primer OrdenManríquez Chávez Yasser Aben AmarAún no hay calificaciones
- Funcion de Transferencia ZDocumento14 páginasFuncion de Transferencia ZVannie ValeriaAún no hay calificaciones
- Laboratorio 3 Determinacion de Los Parametros de La Funcion de Transferencia.Documento9 páginasLaboratorio 3 Determinacion de Los Parametros de La Funcion de Transferencia.Shary Blue100% (3)
- Tarea1 - Reconocer Necesidades de AprendizajeDocumento3 páginasTarea1 - Reconocer Necesidades de AprendizajeJorman ManriqueAún no hay calificaciones
- Taller de Sistemas Electricos y Diagrama de BloquesDocumento6 páginasTaller de Sistemas Electricos y Diagrama de BloquesMichael Steven EscobarAún no hay calificaciones
- Metodos NumericosDocumento14 páginasMetodos NumericosRaúl Dylan CapchaAún no hay calificaciones
- Paso 3 - Sistemas DinamicosDocumento52 páginasPaso 3 - Sistemas Dinamicosfelipe sanchezAún no hay calificaciones
- Laboratorio 2 Sistemas LinealesDocumento14 páginasLaboratorio 2 Sistemas LinealesDaniel Sebastian Iberos ColqueAún no hay calificaciones
- Respuesta en El Tiempo de Un Sistema de ControlDocumento26 páginasRespuesta en El Tiempo de Un Sistema de ControlMIGUEL ANGEL QUIMBITA PANCHIAún no hay calificaciones