También podría gustarte
- Administración de ProyectosDocumento27 páginasAdministración de ProyectosLilianaEspinozaPérezAún no hay calificaciones
- 1.4 Factores de Interés y Su EmpleoDocumento9 páginas1.4 Factores de Interés y Su EmpleoGerardo Avilés MartínezAún no hay calificaciones
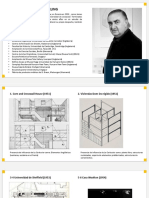
- James StirlingDocumento20 páginasJames StirlingVanya Maythe Vargas NavarroAún no hay calificaciones
- Principios de Economía de MovimientosDocumento32 páginasPrincipios de Economía de MovimientosD.VillotaAún no hay calificaciones
- Funciones y Responsabilidades Del Departamento de MantenimientoDocumento17 páginasFunciones y Responsabilidades Del Departamento de MantenimientoRafael PantiAún no hay calificaciones
- Formato Muestreo Del TrabajoDocumento1 páginaFormato Muestreo Del TrabajoFranceli Pascual LeonAún no hay calificaciones
- MTM ExposicionDocumento32 páginasMTM ExposicionEdwin Andres PalmerosAún no hay calificaciones
- Maquinado Con Chorro AbrasivoDocumento14 páginasMaquinado Con Chorro Abrasivoesteban cervantesAún no hay calificaciones
- Conceptos y Terminología de La DepreciaciónDocumento6 páginasConceptos y Terminología de La DepreciaciónarmandoAún no hay calificaciones
- Unidad 5Documento15 páginasUnidad 5soniaAún no hay calificaciones
- TallerDocumento10 páginasTallerAnonymous EBW5VrB100% (2)
- MOSTDocumento7 páginasMOSTDAN BERNALI GOMEZ ZAVALAAún no hay calificaciones
- INFORME Situacional de Obra VivancoDocumento10 páginasINFORME Situacional de Obra VivancoRitta Monica Verastegui Quispe100% (1)
- Estudio Del Trabajo Analisis de Operaciones de Una TortilleriaDocumento9 páginasEstudio Del Trabajo Analisis de Operaciones de Una TortilleriaJudy C Rdz0% (1)
- Reporte Práctica 06 Balance de LineasDocumento7 páginasReporte Práctica 06 Balance de LineasDiego VelásquezAún no hay calificaciones
- Work FactorDocumento15 páginasWork FactorJose Salaya JuventahinoAún no hay calificaciones
- Unidad 4: Instituto Tecnológico Superior de El ManteDocumento4 páginasUnidad 4: Instituto Tecnológico Superior de El ManteHernández Angeles Santos EmmanuelAún no hay calificaciones
- Cuestionario Analisis de OperacionesDocumento2 páginasCuestionario Analisis de OperacionesVictor GalvezAún no hay calificaciones
- Ejercicios Administracion de AlmacenesDocumento85 páginasEjercicios Administracion de AlmacenesAngel FloresAún no hay calificaciones
- Unidad 3 Operacion de BodegasDocumento3 páginasUnidad 3 Operacion de BodegasEduardo Arteaga ZuñigaAún no hay calificaciones
- Antologia 2Documento80 páginasAntologia 2Alvaro GonzAún no hay calificaciones
- Tema 4.5 EsmeriladoDocumento12 páginasTema 4.5 Esmeriladoaaron josafat100% (1)
- Apuntes Del Curso: Diagramas de Flujo de EfectivoDocumento15 páginasApuntes Del Curso: Diagramas de Flujo de Efectivocarlos parraAún no hay calificaciones
- Implicaciones y MetodologiaDocumento6 páginasImplicaciones y MetodologiaJesus CastañedaAún no hay calificaciones
- 3.6 Riesgos Infecto BiologicosDocumento20 páginas3.6 Riesgos Infecto BiologicosMartinez AndonAún no hay calificaciones
- Procesos Regionales FinalDocumento14 páginasProcesos Regionales FinalLuis Felipe Michel MtnzAún no hay calificaciones
- Muestreo de Trabajo Tiempo EstándarDocumento21 páginasMuestreo de Trabajo Tiempo EstándarIvan LopezAún no hay calificaciones
- Teoría de La UtilidadDocumento5 páginasTeoría de La UtilidadErik Aguilera CondeAún no hay calificaciones
- 2.7 Balanceo de Lineas Asistido Por ComputadoraDocumento14 páginas2.7 Balanceo de Lineas Asistido Por ComputadoraNallely VegaAún no hay calificaciones
- Aplicación de Los Datos Estándar Estudio Del TrabajoDocumento6 páginasAplicación de Los Datos Estándar Estudio Del TrabajoJorge Del AngelAún no hay calificaciones
- Cuadro GrecolatinoDocumento9 páginasCuadro Grecolatinojuan arturoAún no hay calificaciones
- Estudio Del Trabajo II Datos EstándarDocumento1 páginaEstudio Del Trabajo II Datos EstándariorifoarAún no hay calificaciones
- UNIDAD 1 Localizacion de InstalacionesDocumento35 páginasUNIDAD 1 Localizacion de InstalacionesLizbeth MárquezAún no hay calificaciones
- Trabajo EnsamblesDocumento11 páginasTrabajo EnsamblesGuillermo CasanovaAún no hay calificaciones
- Banco de PreguntasDocumento51 páginasBanco de Preguntasaaron100% (1)
- Muestreo Del Trabajo - Qué Es y Cómo Se Hace en 6 PasosDocumento20 páginasMuestreo Del Trabajo - Qué Es y Cómo Se Hace en 6 Pasososhea7Aún no hay calificaciones
- Análisis de DecisionesDocumento4 páginasAnálisis de DecisionesKarla JuarezAún no hay calificaciones
- Datos Estandar Taladro Fresadora - 2Documento11 páginasDatos Estandar Taladro Fresadora - 2Lu ArellanoAún no hay calificaciones
- Ensayo Unidad Ii Gestiòn CostosDocumento6 páginasEnsayo Unidad Ii Gestiòn CostosYuliAún no hay calificaciones
- Smed TerminadoDocumento7 páginasSmed Terminadoxavos0% (1)
- Distribución de Áreas de Recepción y EmbarqueDocumento14 páginasDistribución de Áreas de Recepción y EmbarqueSilvano Velazquez RoqueAún no hay calificaciones
- A1 - T3 - Ing de CalidadDocumento14 páginasA1 - T3 - Ing de CalidadIker Luis PeñalozaAún no hay calificaciones
- Ejercicios TaladroDocumento1 páginaEjercicios TaladroRUCKMEN GAMERAún no hay calificaciones
- Actividad Unidad 4Documento28 páginasActividad Unidad 4Francisco SchuldinerAún no hay calificaciones
- 1.3 Los Valores Del MexicanoDocumento11 páginas1.3 Los Valores Del MexicanoHector Martinez ParraAún no hay calificaciones
- Unidad 3 Planeacion de La CapacidadDocumento69 páginasUnidad 3 Planeacion de La CapacidadEdgar M Velasco67% (3)
- Procesos RegionalesDocumento14 páginasProcesos RegionalesAura SantiagoAún no hay calificaciones
- Procesos Tecnologicos para La Obtencion Del AceroDocumento5 páginasProcesos Tecnologicos para La Obtencion Del AceroDenisse Areli Pichardo0% (1)
- Pelicula Destello de GenioDocumento2 páginasPelicula Destello de Geniomartinb21Aún no hay calificaciones
- 5.1 Requisitos de Mantenimiento de Acuerdo A La Norma Iso 9001 e Iso Ts 16949Documento31 páginas5.1 Requisitos de Mantenimiento de Acuerdo A La Norma Iso 9001 e Iso Ts 16949Jose A. ZuRita100% (1)
- Análisis Del Método Kilbridge y WesterDocumento1 páginaAnálisis Del Método Kilbridge y WesterAndres Santiago Miranda JaimesAún no hay calificaciones
- Unidad 3 Inv. Operaciones (Enunciados)Documento2 páginasUnidad 3 Inv. Operaciones (Enunciados)osc8240% (1)
- Acabados Superficiales ExpoDocumento14 páginasAcabados Superficiales ExpoFernanda BarreraAún no hay calificaciones
- Taxonomía de BeerDocumento8 páginasTaxonomía de BeerLuis Fernando Garcia candeleroAún no hay calificaciones
- Unidad 4 Datos Estándar en Operaciones de MaquinadoDocumento13 páginasUnidad 4 Datos Estándar en Operaciones de MaquinadoCésar González Barrios33% (3)
- Unidad 4 Sistemas de ManufacturaDocumento73 páginasUnidad 4 Sistemas de ManufacturaADRIAN ALEJANDRO MARTINEZ JIMENEZAún no hay calificaciones
- Ejercicios Economia Trabajo FinalDocumento5 páginasEjercicios Economia Trabajo FinalIvan J. Jurado VilcaAún no hay calificaciones
- Compuestos TermofraguantesDocumento7 páginasCompuestos TermofraguantesAlfredo Gómez SAún no hay calificaciones
- SIMULACIONDocumento29 páginasSIMULACIONCarlos ContrerasAún no hay calificaciones
- Ergonomia Unidad 3Documento20 páginasErgonomia Unidad 3Luis Fernando SanchezAún no hay calificaciones
- CANTIDADES DISPONIBLES PARA PROMESA Equipo4Documento9 páginasCANTIDADES DISPONIBLES PARA PROMESA Equipo4Pablo OsorioAún no hay calificaciones
- Unidad 3 EstrategiaDocumento13 páginasUnidad 3 Estrategiaarnold vazquez herreraAún no hay calificaciones
- Alcanzar Ing Trabajo ExpoDocumento12 páginasAlcanzar Ing Trabajo ExpoGrace Miguel AlvarezAún no hay calificaciones
- Taller Diseño de Entrepiso Mecanica de SolidosDocumento3 páginasTaller Diseño de Entrepiso Mecanica de SolidosAnonymous EBW5VrBAún no hay calificaciones
- TALLER%206%20 Modelo%20 De%20 Cantidad%20 econ%C3%B3 Mica%20 De%20 Pedido%20 EOQDocumento2 páginasTALLER%206%20 Modelo%20 De%20 Cantidad%20 econ%C3%B3 Mica%20 De%20 Pedido%20 EOQAnonymous EBW5VrBAún no hay calificaciones
- TallerDocumento4 páginasTallerAnonymous EBW5VrBAún no hay calificaciones
- Ejercicios Examen FinalDocumento2 páginasEjercicios Examen FinalAnonymous EBW5VrBAún no hay calificaciones
- Taller MRP 1Documento2 páginasTaller MRP 1Anonymous EBW5VrBAún no hay calificaciones
- Act 8 Calculo IntegralDocumento3 páginasAct 8 Calculo IntegralAnonymous EBW5VrBAún no hay calificaciones
- Fondea 2019-2Documento3 páginasFondea 2019-2Anonymous EBW5VrBAún no hay calificaciones
- Trabajo Problemas de Prueba II 2017Documento2 páginasTrabajo Problemas de Prueba II 2017Anonymous EBW5VrBAún no hay calificaciones
- Ivan Paul Martinez SeparadoresDocumento12 páginasIvan Paul Martinez SeparadoresLuis LeonAún no hay calificaciones
- Diseà o de Colector de Semillas de Achite para Los Productores Del Edo. de TacascoDocumento191 páginasDiseà o de Colector de Semillas de Achite para Los Productores Del Edo. de TacascoapenicheAún no hay calificaciones
- Balance de Constitucion 2020Documento865 páginasBalance de Constitucion 2020siliverAún no hay calificaciones
- Matriz de Consistencia RRHHDocumento9 páginasMatriz de Consistencia RRHHYosk AraozAún no hay calificaciones
- Sistema de Telecontrol y Supervisión para Instalaciones deDocumento10 páginasSistema de Telecontrol y Supervisión para Instalaciones deenergía solar okAún no hay calificaciones
- Tema 1. AcerosDocumento26 páginasTema 1. AcerosAlejandro CouohAún no hay calificaciones
- Hoja de Tarea de Diagnostico de La BateriaDocumento6 páginasHoja de Tarea de Diagnostico de La BateriaAntony A Flores CisnerosAún no hay calificaciones
- Tpmonline Presentacion TPMDocumento26 páginasTpmonline Presentacion TPMEnrique EmmanuelAún no hay calificaciones
- Proyecto Software IntranetDocumento50 páginasProyecto Software IntranetedgarapazacAún no hay calificaciones
- Internet LAN CANTVDocumento14 páginasInternet LAN CANTVXabierz0% (1)
- Mantenimiento Preventivo y Correctivo Del Sistema Electrico en Almacen General - Natclar SurcoDocumento10 páginasMantenimiento Preventivo y Correctivo Del Sistema Electrico en Almacen General - Natclar SurcoZileri Machacuay GamarraAún no hay calificaciones
- Tipos de Soldadura Con SopleteDocumento5 páginasTipos de Soldadura Con SopleteJuan Carlos Yalico PonteAún no hay calificaciones
- Economía - EjerciciosDocumento8 páginasEconomía - EjerciciosVeronicaAún no hay calificaciones
- Problemas EquilibrioDocumento4 páginasProblemas EquilibriotioguillyAún no hay calificaciones
- Seis SigmaDocumento21 páginasSeis SigmaJulian GonzalezAún no hay calificaciones
- Comportamiento Mecanico de Las DiscontinuidadesDocumento47 páginasComportamiento Mecanico de Las Discontinuidadesdaarrietacivil9011Aún no hay calificaciones
- Presentacion 3, 4, 5, 6, 7 (Unificadas)Documento219 páginasPresentacion 3, 4, 5, 6, 7 (Unificadas)Leonardo CosteAún no hay calificaciones
- Jorge LuisDocumento15 páginasJorge LuisJorge Luis Callupe AlvinoAún no hay calificaciones
- Sentencias de ControlDocumento5 páginasSentencias de ControlDARIO OZETA GARCIAAún no hay calificaciones
- Informe Acido EstearicoDocumento2 páginasInforme Acido EstearicoNovaplast SAAún no hay calificaciones
- 09 Gestion de Calidad en La Construccion Unfv 2016Documento65 páginas09 Gestion de Calidad en La Construccion Unfv 2016MAG. ING M. HAMILTON WILSON HUAMANCHUMOAún no hay calificaciones
- Catalogo Flexowash Handy 2x2 AutomaticDocumento2 páginasCatalogo Flexowash Handy 2x2 Automaticjulian gutierrezAún no hay calificaciones
- AD428748643768es MX202212Documento2 páginasAD428748643768es MX202212fernandoAún no hay calificaciones
- Factus-Módulo CapacitaciónDocumento12 páginasFactus-Módulo CapacitaciónEmmily Gudiel SolaresAún no hay calificaciones
- Tabla I: Cooperativa Rural de Electrificación LtdaDocumento6 páginasTabla I: Cooperativa Rural de Electrificación LtdaLuis Enrique Rojas Fernández100% (1)
- Eternit Mantenimiento Tejas OnduladasDocumento18 páginasEternit Mantenimiento Tejas OnduladasRoberto Carlos Chiuyari CusiAún no hay calificaciones
- TRS ZC PDocumento3 páginasTRS ZC PRodolfo AlbinoAún no hay calificaciones
- PRACTICA Nro 2 ELT 2680 DIGITAL 1Documento2 páginasPRACTICA Nro 2 ELT 2680 DIGITAL 1Sebastian PacollaAún no hay calificaciones