También podría gustarte
- Trabajo Final 1 RobotDocumento24 páginasTrabajo Final 1 RobotJeffrey Vasquez González0% (1)
- Manual de Maquinado Copper CamDocumento10 páginasManual de Maquinado Copper Camkupak52100% (1)
- Comunicacion Protocolo HartDocumento7 páginasComunicacion Protocolo HartElvis Medardo Cano LaymeAún no hay calificaciones
- Manual de Programacion en Sinumerik 802sDocumento14 páginasManual de Programacion en Sinumerik 802sMarques RodriguezAún no hay calificaciones
- Practica N°4Documento9 páginasPractica N°4Juan MartinezAún no hay calificaciones
- Accesorios y Dispositivos Del TornoDocumento9 páginasAccesorios y Dispositivos Del TornoAlexander Zapata100% (3)
- Condensador SincrónicoDocumento3 páginasCondensador SincrónicoGeovass Rock50% (2)
- Foro Tematico Fr1 RoboticaDocumento3 páginasForo Tematico Fr1 RoboticajoseAún no hay calificaciones
- Programación ACL PDFDocumento18 páginasProgramación ACL PDFFernando CalderoniAún no hay calificaciones
- Mejor Software de Simulación de Robótica - Tienda de RobóticaDocumento13 páginasMejor Software de Simulación de Robótica - Tienda de RobóticaDanny Joel C SAún no hay calificaciones
- UR Industry-eBook Other Spanish 20200329 PDFDocumento8 páginasUR Industry-eBook Other Spanish 20200329 PDFJuan PerezAún no hay calificaciones
- Guía de Instalación 3018Documento5 páginasGuía de Instalación 3018Alfredo SegundoAún no hay calificaciones
- Osciloscopio OwonDocumento28 páginasOsciloscopio OwonBach Daniel0% (1)
- Da 65 3 SP 2004servossiemensDocumento189 páginasDa 65 3 SP 2004servossiemensjorge1Aún no hay calificaciones
- Actividad 5 - Comandos Intermedios - Tareas Repetitivas y CiclosDocumento4 páginasActividad 5 - Comandos Intermedios - Tareas Repetitivas y Ciclosfelipe berrioAún no hay calificaciones
- Programador Universal Microchip Picstart PlusDocumento51 páginasProgramador Universal Microchip Picstart PlusJuan ZarateAún no hay calificaciones
- RDGI0011 H Guia Integracion Promia SRE EspDocumento233 páginasRDGI0011 H Guia Integracion Promia SRE EspAndy CholakianAún no hay calificaciones
- CAP.4 Cx-Programmer - PLC OmronDocumento78 páginasCAP.4 Cx-Programmer - PLC OmronFreddy TorresAún no hay calificaciones
- Heidenhain 530Documento657 páginasHeidenhain 530toni_78Aún no hay calificaciones
- Camwork 2001Documento5 páginasCamwork 2001josepaz76Aún no hay calificaciones
- SoMachine - Funciones de Lectura-Escritura Modbus y ASCII, Guía de La Biblioteca PLCCommunicationDocumento88 páginasSoMachine - Funciones de Lectura-Escritura Modbus y ASCII, Guía de La Biblioteca PLCCommunicationDaniel Rodrigo Olivares MesiasAún no hay calificaciones
- Sinumerik 840D Mill PDFDocumento256 páginasSinumerik 840D Mill PDFAlex Salazar BorgesAún no hay calificaciones
- Manual de InstruccionesDocumento816 páginasManual de InstruccionesMarcos Moncunill FelipeAún no hay calificaciones
- PinguinoDocumento66 páginasPinguinoPablo CárdenasAún no hay calificaciones
- Abb Niessen Catálogo Tarifa 2014 Tomo Ii Automatización y ControlDocumento664 páginasAbb Niessen Catálogo Tarifa 2014 Tomo Ii Automatización y ControlVEMATELAún no hay calificaciones
- Comandos Basicos IDocumento34 páginasComandos Basicos IFreddy Escorza100% (1)
- Manual JXCP PLC TIA Portal DemoDocumento7 páginasManual JXCP PLC TIA Portal DemoIñakiAún no hay calificaciones
- Curso Eagle 6Documento31 páginasCurso Eagle 6Armandosky OsoskyAún no hay calificaciones
- Robot Controlado Con Wifi Mediante Raspberry y Node - JsDocumento54 páginasRobot Controlado Con Wifi Mediante Raspberry y Node - JsmartinlaplaceAún no hay calificaciones
- Movipro Manualpocket Diagnóstico Castellano TB Movipro Diagnose Stoerungssuche A51 EsDocumento98 páginasMovipro Manualpocket Diagnóstico Castellano TB Movipro Diagnose Stoerungssuche A51 EsAlfredo Jose Centeno Cortes100% (1)
- 74hc595 Shift RegisterDocumento4 páginas74hc595 Shift RegisterPablo NosedaAún no hay calificaciones
- Desarrollo de Un Prototipo de Brazo Robótico - Daniel Osorio C - VersiónFinal - PG PDFDocumento86 páginasDesarrollo de Un Prototipo de Brazo Robótico - Daniel Osorio C - VersiónFinal - PG PDFDANIEL OSORIO CARDENASAún no hay calificaciones
- RsLogix 500Documento2 páginasRsLogix 500Karen BLAún no hay calificaciones
- Anexo 4. Guía de Usuario Acselerator ArchitectDocumento16 páginasAnexo 4. Guía de Usuario Acselerator Architectjohn torresAún no hay calificaciones
- Introducción A NI MultisimDocumento17 páginasIntroducción A NI MultisimDemian Cashh MnheyAún no hay calificaciones
- Datos Tecnicos de Brazos RoboticosDocumento9 páginasDatos Tecnicos de Brazos RoboticosAndrés MoralesAún no hay calificaciones
- Informe Mini Sumo Digitales 1Documento4 páginasInforme Mini Sumo Digitales 1Yair Sebastian Herrera VegaAún no hay calificaciones
- Actividad 3 - Mecanizado de Dos Piezas PlanasDocumento4 páginasActividad 3 - Mecanizado de Dos Piezas PlanasPedro Angel Villada SanchezAún no hay calificaciones
- Lamp y MQTTDocumento12 páginasLamp y MQTTHenry PastuñaAún no hay calificaciones
- Software JFLAPDocumento5 páginasSoftware JFLAPRoberto Carlos Vasquez AbarcaAún no hay calificaciones
- Manual Pro Engineer WildfireDocumento136 páginasManual Pro Engineer Wildfiredr_dwinAún no hay calificaciones
- Robotino PDFDocumento211 páginasRobotino PDFDavid BasantesAún no hay calificaciones
- Sew Mdx61b EncoderDocumento72 páginasSew Mdx61b EncoderEva SuárezAún no hay calificaciones
- Entrenamiento TPSi Avanzado PDFDocumento51 páginasEntrenamiento TPSi Avanzado PDFJuan Luis CervantesAún no hay calificaciones
- García Reig - Diseño y Fabricación de Un Brazo Robótico de 6 GDL de Bajo Coste Basado en ArduinoDocumento69 páginasGarcía Reig - Diseño y Fabricación de Un Brazo Robótico de 6 GDL de Bajo Coste Basado en ArduinoSebastián Ferrer FerreAún no hay calificaciones
- Brazo Robotico Labview ArduinoDocumento17 páginasBrazo Robotico Labview ArduinoAdry CamachoAún no hay calificaciones
- VisualMILL 6 Tutorial EspDocumento39 páginasVisualMILL 6 Tutorial EspEros TresAún no hay calificaciones
- Proteus Tutorial EspanõlDocumento162 páginasProteus Tutorial EspanõlAlfredo da SilveiraAún no hay calificaciones
- Factory IODocumento9 páginasFactory IOGUSTAVO TOVARAún no hay calificaciones
- Robótica - 4-Sistemas de Coordenadas PDFDocumento16 páginasRobótica - 4-Sistemas de Coordenadas PDFAlejandro CordobaAún no hay calificaciones
- PWM s7-300Documento6 páginasPWM s7-300Juan Fernando CarmonaAún no hay calificaciones
- Arduino JDDocumento73 páginasArduino JDCarlos Sosa100% (1)
- Introduccion A La RoboticaDocumento101 páginasIntroduccion A La RoboticaSEBASTIAN HUMBERTO RIVAS CIFUENTES100% (1)
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Manual RobotstudioDocumento390 páginasManual RobotstudioDiego Trinidad TapiaAún no hay calificaciones
- RapidDocumento26 páginasRapidHiroshi KannoAún no hay calificaciones
- Robotica Industrial TR!Documento6 páginasRobotica Industrial TR!Renzo Lescano ParedesAún no hay calificaciones
- Practica - 4 - Lab - Ad2022 1Documento8 páginasPractica - 4 - Lab - Ad2022 1Leobardo BautistaAún no hay calificaciones
- Practica 1 RobocellDocumento7 páginasPractica 1 RobocellJuly CarranzaAún no hay calificaciones
- Scorbot-ER VDocumento6 páginasScorbot-ER VDanilo Alfonso Rojas MendezAún no hay calificaciones
- TR FinalDocumento11 páginasTR FinalcrtAún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- MMS-P Sección Del CatálogoDocumento8 páginasMMS-P Sección Del CatálogoGerardo Cruz EspinosaAún no hay calificaciones
- Descarga Tu Mazda 2023285337Documento2 páginasDescarga Tu Mazda 2023285337Gerardo Cruz EspinosaAún no hay calificaciones
- Datasheet Sensor BOD 63M BOD0010Documento3 páginasDatasheet Sensor BOD 63M BOD0010Gerardo Cruz EspinosaAún no hay calificaciones
- Información Hielera (Heladera)Documento10 páginasInformación Hielera (Heladera)Gerardo Cruz EspinosaAún no hay calificaciones
- Sistema Productivo FundamentosDocumento18 páginasSistema Productivo FundamentosGerardo Cruz EspinosaAún no hay calificaciones
- Sistema Productivo FundamentosDocumento18 páginasSistema Productivo FundamentosGerardo Cruz EspinosaAún no hay calificaciones
- La Familia Co: Mo Contexto de DesarroDocumento40 páginasLa Familia Co: Mo Contexto de DesarroGerardo Cruz Espinosa100% (1)
- Resume Psicologia Unidad 4 y 5Documento14 páginasResume Psicologia Unidad 4 y 5Gerardo Cruz EspinosaAún no hay calificaciones
- Determinacion DurezaDocumento9 páginasDeterminacion DurezavanesitaezAún no hay calificaciones
- Sesion 4Documento9 páginasSesion 4Miguel CruzAún no hay calificaciones
- Lec09 - Series de Fourier Compleja - Master PDFDocumento17 páginasLec09 - Series de Fourier Compleja - Master PDFLuis Javier Morales-MendozaAún no hay calificaciones
- Diseno de PlantasDocumento179 páginasDiseno de PlantasjesusAún no hay calificaciones
- GIA-A-A15 PC3B20K001 Tailgate Assist - pdf-GPmZ5Oa7xBDocumento9 páginasGIA-A-A15 PC3B20K001 Tailgate Assist - pdf-GPmZ5Oa7xBPablo GómezAún no hay calificaciones
- Practica Intrumentacion - Decoloracion de La FenolftaleinaDocumento11 páginasPractica Intrumentacion - Decoloracion de La FenolftaleinaALLAGE275% (4)
- Terminos de Referencia para La Contratacion de Un Ingeniero AgricolaDocumento16 páginasTerminos de Referencia para La Contratacion de Un Ingeniero AgricolaMaría AlcántaraAún no hay calificaciones
- BW - Parte 1 - Business Information WarehouseDocumento34 páginasBW - Parte 1 - Business Information WarehousemaltisenchAún no hay calificaciones
- Contrato de Trabajo para ConstruccionDocumento1 páginaContrato de Trabajo para Construccionxiomara pamelaAún no hay calificaciones
- Spiderbeam Instruccion EspanolDocumento37 páginasSpiderbeam Instruccion EspanolJulio Krauss100% (1)
- Importancia de La Mecanización AgropecuariaDocumento9 páginasImportancia de La Mecanización Agropecuariasu kiAún no hay calificaciones
- EstáticaDocumento19 páginasEstáticaalejoDagonAún no hay calificaciones
- 10-11. Ley de Ohm-PotenciaDocumento17 páginas10-11. Ley de Ohm-PotenciaLizbeth Pilar HernandezAún no hay calificaciones
- Ensayo Mecanica de MaterialesDocumento12 páginasEnsayo Mecanica de MaterialesalejandroAún no hay calificaciones
- Construccion de Un Iman ArtificialDocumento4 páginasConstruccion de Un Iman ArtificialWalter Ferney Acevedo DuarteAún no hay calificaciones
- Shrinkage 2Documento45 páginasShrinkage 2Ignacio Burgos Del CantoAún no hay calificaciones
- Guia Caracterizacion Enzima BioquimicaDocumento25 páginasGuia Caracterizacion Enzima BioquimicaCamiloAún no hay calificaciones
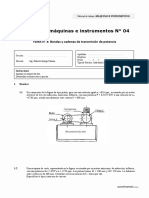
- Practica 04 Bandas y Cadenas de Transmision de Potencia - CocodrileDocumento4 páginasPractica 04 Bandas y Cadenas de Transmision de Potencia - CocodrileKarin ClaveriasAún no hay calificaciones
- Mapa de Procesos Planta de Energi Üa Fotovoltaica 2020 OKDocumento1 páginaMapa de Procesos Planta de Energi Üa Fotovoltaica 2020 OKFranciscaAún no hay calificaciones
- Manual CardanDocumento16 páginasManual CardanLuis Fernando ZambranoAún no hay calificaciones
- Diseño Geometrico de Badenes en XLS - CAD (405.66 KB) - BibliocadDocumento10 páginasDiseño Geometrico de Badenes en XLS - CAD (405.66 KB) - BibliocadManuelAugustoBarnuevoLachosAún no hay calificaciones
- Planilla Vigas CompuestasDocumento3 páginasPlanilla Vigas CompuestasMarcelo ElguetaAún no hay calificaciones
- EC, TDS, PPM, FC - Conceptos en HidroponiaDocumento6 páginasEC, TDS, PPM, FC - Conceptos en HidroponiaJose Enrique SantamariaAún no hay calificaciones
- Lithium Battery Guidance Document 2017 en Español EditarDocumento36 páginasLithium Battery Guidance Document 2017 en Español EditarEduardoAún no hay calificaciones
- 04 Estudio Hidraulico e Hidrologico Turbo v7Documento67 páginas04 Estudio Hidraulico e Hidrologico Turbo v7sebastian romanAún no hay calificaciones
- Marco en Lamina Cal 18Documento1 páginaMarco en Lamina Cal 18Andrés RincónAún no hay calificaciones
- Catálogo Tractor Sobre Orugaas D61EX 23M0 Esp DigitalDocumento16 páginasCatálogo Tractor Sobre Orugaas D61EX 23M0 Esp DigitalCristhian GalánAún no hay calificaciones
- Facultad de Ingeniería EstadísticaDocumento13 páginasFacultad de Ingeniería EstadísticaMarco Choque PecerosAún no hay calificaciones