También podría gustarte
- Ejercicios Con Tia Portal s7 1200Documento15 páginasEjercicios Con Tia Portal s7 1200raul85% (13)
- Sistemas automáticos industriales de eventos discretosDe EverandSistemas automáticos industriales de eventos discretosAún no hay calificaciones
- Automatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoDe EverandAutomatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoAún no hay calificaciones
- Manual Manipulador Mt1435slDocumento232 páginasManual Manipulador Mt1435slmonica100% (2)
- Esm-Sig-E31.01 Check List de VolqueteDocumento1 páginaEsm-Sig-E31.01 Check List de VolqueteJunior Steven Reynoso Calzada100% (8)
- Marcelo Figueroa Tarea5 LIDocumento11 páginasMarcelo Figueroa Tarea5 LIMarcelo Figueroa40% (5)
- EJERCICIO 19 GRAFCET - ResueltoDocumento6 páginasEJERCICIO 19 GRAFCET - ResueltoJosep Chicori50% (2)
- EJERCICIOS GRAFCET (Con Solución)Documento5 páginasEJERCICIOS GRAFCET (Con Solución)JAVIER SALVADOR FERNANDEZ50% (2)
- Practica. Detección y Expulsión de Botellas Sin TaponDocumento3 páginasPractica. Detección y Expulsión de Botellas Sin TaponPatriciaBlázquezGarcíaAún no hay calificaciones
- Ejercicios para Programar Con PLCDocumento10 páginasEjercicios para Programar Con PLCJavier Lopez Sanchez100% (3)
- Ejercicios PLC ClaveDocumento15 páginasEjercicios PLC ClaveLizardo Meneses Rojas100% (1)
- Problemas de PLCDocumento8 páginasProblemas de PLCMelissa100% (2)
- Ejercicios Resueltos Grafcet PDFDocumento3 páginasEjercicios Resueltos Grafcet PDFLaura Mayara Proenza GonzálezAún no hay calificaciones
- Ejercicios Resueltos de PLCS y SensoresDocumento16 páginasEjercicios Resueltos de PLCS y SensoresGonzalo GrimaldiAún no hay calificaciones
- Ejemplo Guía GEMMADocumento14 páginasEjemplo Guía GEMMAJordi PG100% (5)
- Proyectos de Automatizacic3b3n para Cpu s7 1200Documento21 páginasProyectos de Automatizacic3b3n para Cpu s7 1200Javier RubioAún no hay calificaciones
- Bomba Diesel EpicDocumento30 páginasBomba Diesel EpicDani-meganeboy80% (5)
- Form Declaracion Camion Tanque de CLDocumento2 páginasForm Declaracion Camion Tanque de CLRoman Roa MachucaAún no hay calificaciones
- El Pueblo de Los Gatos X Haruki MurakamiDocumento2 páginasEl Pueblo de Los Gatos X Haruki MurakamiYon UberuagaAún no hay calificaciones
- Ejercicios GrafcetDocumento4 páginasEjercicios GrafcetRonald Eder Chavez Palomino100% (2)
- Grafcet Teoria y EjemplosDocumento46 páginasGrafcet Teoria y EjemplosMiguel Esquit50% (2)
- Ejercicios de Grafcet PDFDocumento69 páginasEjercicios de Grafcet PDFdizzelmx83% (6)
- Ejercicios de PLCDocumento25 páginasEjercicios de PLCCarolina Solis0% (2)
- Tema5 Ejercicios GrafcetDocumento32 páginasTema5 Ejercicios GrafcetKoko EsclntAún no hay calificaciones
- EjerciciosS7 200Documento7 páginasEjerciciosS7 200el_peruanoAún no hay calificaciones
- Problemas GrafcetDocumento9 páginasProblemas GrafcetShara CruzAún no hay calificaciones
- Ejercicios Grafcet 1Documento9 páginasEjercicios Grafcet 1fragaenrique75% (4)
- Ejercicios Resueltos GrafcetDocumento3 páginasEjercicios Resueltos GrafcetLaura Mayara Proenza GonzálezAún no hay calificaciones
- Ejercicios LadderDocumento6 páginasEjercicios LadderArturo Esquivel Rendón67% (3)
- Ejercicios Resueltos Grafcet PDFDocumento3 páginasEjercicios Resueltos Grafcet PDFLaura Mayara Proenza GonzálezAún no hay calificaciones
- Guía GemmaDocumento12 páginasGuía GemmabrujabergandAún no hay calificaciones
- Curso de GrafcetDocumento66 páginasCurso de Grafcetvicasazn100% (2)
- Circuitos Neumáticos Método de Paso A Paso MínimoDocumento6 páginasCircuitos Neumáticos Método de Paso A Paso Mínimoserolfitnas100% (2)
- InfoPLC Net Ejercicios AutomatismosDocumento15 páginasInfoPLC Net Ejercicios AutomatismosFernando de pedroAún no hay calificaciones
- Ejercicio 2Documento5 páginasEjercicio 2Chris SeguraAún no hay calificaciones
- Ejercicio 2Documento5 páginasEjercicio 2Anonymous VC5mhPT2G100% (1)
- Problema 0401Documento6 páginasProblema 0401rgmaguila1533Aún no hay calificaciones
- Automatism oDocumento15 páginasAutomatism oUrielv OsAún no hay calificaciones
- 2022-06-03 - Flip-Flop R-SDocumento4 páginas2022-06-03 - Flip-Flop R-Scarlos orregoAún no hay calificaciones
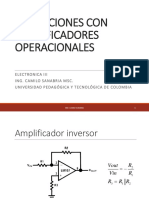
- 5-Aplicaciones Con Amplificadores OperacionalesDocumento23 páginas5-Aplicaciones Con Amplificadores OperacionalesJuan CastilloAún no hay calificaciones
- FLIP Flops PDFDocumento15 páginasFLIP Flops PDFSerafinAún no hay calificaciones
- CONTROL APP ESP-ING Pt. 3Documento40 páginasCONTROL APP ESP-ING Pt. 3fabrixxioggcAún no hay calificaciones
- Linea SinDocumento24 páginasLinea SinGabriel Andres ValenciaAún no hay calificaciones
- Hoja de Estacado SolariumDocumento2 páginasHoja de Estacado SolariumOmr Scrch100% (1)
- Diagrama Powerware 9155 15 KvaDocumento1 páginaDiagrama Powerware 9155 15 KvaSALVADORAún no hay calificaciones
- 2 Alimentadores y Circ DerivadosDocumento14 páginas2 Alimentadores y Circ DerivadosAlexis B JmnezAún no hay calificaciones
- Tss-Instalacion de PDB - MalaDocumento10 páginasTss-Instalacion de PDB - MalaMiguel VasAún no hay calificaciones
- Proceso Floculante 02Documento1 páginaProceso Floculante 02Camilo Jimenez GAún no hay calificaciones
- 1lpe455084pr - EeDocumento12 páginas1lpe455084pr - EeHenry CordovaAún no hay calificaciones
- Diagrama Galaxy 10-15Documento1 páginaDiagrama Galaxy 10-15SALVADORAún no hay calificaciones
- Listado de Planos de ArquitecturaDocumento2 páginasListado de Planos de ArquitecturaMartin MendozaAún no hay calificaciones
- Manual SFR EspanolDocumento252 páginasManual SFR Espanolcristian100% (2)
- Preinforme 2 de Comunicaciones-2Documento10 páginasPreinforme 2 de Comunicaciones-2Edgardiel AzuajeAún no hay calificaciones
- Cuadro CocaDocumento13 páginasCuadro CocaJavier Robledo HerreraAún no hay calificaciones
- Data de Estado de Grupos Electrogenos La LibertadDocumento4 páginasData de Estado de Grupos Electrogenos La LibertadHans aavAún no hay calificaciones
- PLIOP-005 Izamiento Torre e Instalacion Vientos V1Documento17 páginasPLIOP-005 Izamiento Torre e Instalacion Vientos V1Thomas PinzonAún no hay calificaciones
- Valentina TareaDocumento2 páginasValentina TareaDulce V VillaAún no hay calificaciones
- Tema 4 Flip-Flops 2009Documento70 páginasTema 4 Flip-Flops 2009josue charccahuanaAún no hay calificaciones
- Hafei Lobo Service Manual PDF - Compressed-1 64Documento1 páginaHafei Lobo Service Manual PDF - Compressed-1 64Ty ToyAún no hay calificaciones
- Lab 4 DemodulacionDocumento13 páginasLab 4 DemodulacionLUIS ALBERTO CUPA HANCCOAún no hay calificaciones
- Protocolos RS PDFDocumento1 páginaProtocolos RS PDFCesar Huayllapuma RamirezAún no hay calificaciones
- Flip Flop JKDocumento43 páginasFlip Flop JKlugtzAún no hay calificaciones
- Carta AlcocerDocumento1 páginaCarta AlcocerEm GomezAún no hay calificaciones
- Características de Los VehículosDocumento3 páginasCaracterísticas de Los Vehículostareas1Aún no hay calificaciones
- Evaluación de Proyectos-Eusebio Cárdenas PDFDocumento29 páginasEvaluación de Proyectos-Eusebio Cárdenas PDFMartinvertizAún no hay calificaciones
- Memoria Descriptiva PAVIMENTO RÍGIDODocumento15 páginasMemoria Descriptiva PAVIMENTO RÍGIDOJean Carlos Varas VásquezAún no hay calificaciones
- MJ-SSOMA-L-03.02 Plan de Contingencia para Transporte de Carga Especial-2022Documento54 páginasMJ-SSOMA-L-03.02 Plan de Contingencia para Transporte de Carga Especial-2022Yanela Edyth Sosa CortezAún no hay calificaciones
- Analisis EconomicoDocumento6 páginasAnalisis EconomicoFranklin MoralesAún no hay calificaciones
- Check List Ingreso Vibro CompactadorDocumento7 páginasCheck List Ingreso Vibro CompactadorFabian MenesesAún no hay calificaciones
- Guía-Los Buques SuicidantesDocumento3 páginasGuía-Los Buques SuicidantesAnto SidotiAún no hay calificaciones
- Neet 5 6239812024742708540Documento12.664 páginasNeet 5 6239812024742708540ChaituMAún no hay calificaciones
- Metodologa de Construcción - APM TERMINALS MOIN S.ADocumento74 páginasMetodologa de Construcción - APM TERMINALS MOIN S.AAllan SeminarioAún no hay calificaciones
- Ley 769 de 2002 Código Nacional de Tránsito TerrestreDocumento72 páginasLey 769 de 2002 Código Nacional de Tránsito TerrestreAnyelly ThomasAún no hay calificaciones
- Curso de Puentes - III - Ingeniería BásicaDocumento103 páginasCurso de Puentes - III - Ingeniería BásicaCarlos collazoAún no hay calificaciones
- 01.01 Movilizacion y Desmovilizacion2Documento7 páginas01.01 Movilizacion y Desmovilizacion2Waldir Mamani VillenaAún no hay calificaciones
- Averias Caja de CambiosDocumento4 páginasAverias Caja de CambiosDani-meganeboy100% (2)
- Informe 5 - Cargas Q Actuan en Los Puentes - PACHECO LUCIADocumento14 páginasInforme 5 - Cargas Q Actuan en Los Puentes - PACHECO LUCIALucia Pacheco VasquezAún no hay calificaciones
- 1er. Examen Parcial - Ingenieria de Mantenimeinto 2022-II-CALIZAYA ESPINOZA RONALDDocumento2 páginas1er. Examen Parcial - Ingenieria de Mantenimeinto 2022-II-CALIZAYA ESPINOZA RONALDDavid CalizayaAún no hay calificaciones
- Listado de Vehiculos INACTIVOS en 15 01 2019Documento87 páginasListado de Vehiculos INACTIVOS en 15 01 2019Dieguito OrtegaAún no hay calificaciones
- Reporte de MantenimientoDocumento2 páginasReporte de MantenimientoEmilio APAún no hay calificaciones
- Anexo 1 - Anexo TécnicoDocumento45 páginasAnexo 1 - Anexo TécnicoJaime Alexis ForeroAún no hay calificaciones
- Carga A Granel AndresDocumento13 páginasCarga A Granel AndresJokito Villa RSAún no hay calificaciones
- Proyecto Cooperativa de Transporte ChuruataDocumento46 páginasProyecto Cooperativa de Transporte Churuataamcroc_castilloAún no hay calificaciones
- HILUXDocumento1 páginaHILUXJuan GaAún no hay calificaciones
- Viva. Travel Guides. ChileDocumento60 páginasViva. Travel Guides. ChileBibliomaniachilenaAún no hay calificaciones
- La Maquinaria en Las Minas - Maquinaria en La MineriaDocumento6 páginasLa Maquinaria en Las Minas - Maquinaria en La MineriaLeonard EulerAún no hay calificaciones
- Conteo de TráficoDocumento1 páginaConteo de TráficoNAZARIO BAUTISTA HEREDIAAún no hay calificaciones
- WEG Motor de Induccion Trifasicos de Alta y Baja Tension 10399279 Manual EspanolDocumento74 páginasWEG Motor de Induccion Trifasicos de Alta y Baja Tension 10399279 Manual EspanolAlvaro Patricio Benitez MoragaAún no hay calificaciones
- Envases y EmbalajesDocumento3 páginasEnvases y EmbalajesCARLOSAún no hay calificaciones