También podría gustarte
- Libreta de Salud (SUS)Documento36 páginasLibreta de Salud (SUS)Williams David Perez94% (49)
- Trabajo Resistencia de Materiales IIDocumento8 páginasTrabajo Resistencia de Materiales IIbartolome occ muñozAún no hay calificaciones
- Problemas de Fisica ClasicaDocumento221 páginasProblemas de Fisica ClasicaMar Ce LO100% (1)
- Fuerzas Distribuidas 3Documento27 páginasFuerzas Distribuidas 3Mirella Huaroc GálvezAún no hay calificaciones
- Requisitos para Cumplimineto Estandar de Control Fatalidad 3Documento14 páginasRequisitos para Cumplimineto Estandar de Control Fatalidad 3Edu Pastén MejiasAún no hay calificaciones
- Conmutador e InversorDocumento10 páginasConmutador e InversorLuis Jhonatan Moreyra MalpicaAún no hay calificaciones
- Grilletes Green Pin PDFDocumento38 páginasGrilletes Green Pin PDFsebastianvmAún no hay calificaciones
- Problema TipoDocumento4 páginasProblema TipoXcanda ReyesAún no hay calificaciones
- PTS Izaje de CargaDocumento14 páginasPTS Izaje de CargaEsteban MoralesAún no hay calificaciones
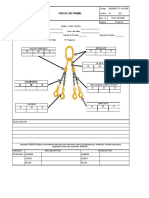
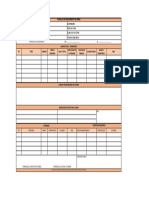
- TF CHL 005 Check List RamalDocumento3 páginasTF CHL 005 Check List RamalChris Bravo HuertaAún no hay calificaciones
- Memoria-Oreja Buzon M.EDocumento3 páginasMemoria-Oreja Buzon M.ELuis Enrique Ortiz ZuñigaAún no hay calificaciones
- Fisica FinalDocumento30 páginasFisica FinalCarlos HuamaníAún no hay calificaciones
- Clase 06-ANALEST PDFDocumento18 páginasClase 06-ANALEST PDFEdwin GonzalesAún no hay calificaciones
- Manual Fosa Septica y Construccion DrenajesDocumento2 páginasManual Fosa Septica y Construccion Drenajesdiego12311232100% (1)
- Conexiones Atornilladas - PresentacionDocumento27 páginasConexiones Atornilladas - PresentacionAndrew 2560Aún no hay calificaciones
- Tabla CentroidesDocumento1 páginaTabla CentroidesAlejandro CarrasqueroAún no hay calificaciones
- Nos-0hise.041 Habilitacion y Operacion de Equipos MotomovilesDocumento12 páginasNos-0hise.041 Habilitacion y Operacion de Equipos MotomovilesGastón SarapuraAún no hay calificaciones
- Velocidad de Viento y Maniobras de IzajeDocumento1 páginaVelocidad de Viento y Maniobras de Izajehoduart0620Aún no hay calificaciones
- Mutual Excavaciones PDFDocumento16 páginasMutual Excavaciones PDFroodrigoAún no hay calificaciones
- Descomposición Del Dominio de La FrecuenciaDocumento8 páginasDescomposición Del Dominio de La FrecuenciaAlfonso BautistaAún no hay calificaciones
- Planos MecanicosDocumento2 páginasPlanos MecanicosBenjamín AquietaAún no hay calificaciones
- Introduccion A La Ingeneria Indutrial (Gabriel Baca U.ET AL) PDFDocumento9 páginasIntroduccion A La Ingeneria Indutrial (Gabriel Baca U.ET AL) PDFEric Velasquez YañezAún no hay calificaciones
- 25800-500-V145-CM00-00099 (002) Rigging Plan Descarga y Montaje Contrapesos MW4100 Con RT890EDocumento56 páginas25800-500-V145-CM00-00099 (002) Rigging Plan Descarga y Montaje Contrapesos MW4100 Con RT890EOficina TecnicaAún no hay calificaciones
- Edificio de 10 Pisos PDFDocumento21 páginasEdificio de 10 Pisos PDFJuan Pablo Deza MartellAún no hay calificaciones
- CP Act1Documento1 páginaCP Act1James UrbinaAún no hay calificaciones
- Supervision Tecnica de ObraDocumento9 páginasSupervision Tecnica de Obracfpc10459Aún no hay calificaciones
- PL-1784-SSO-02 Plan de Emergencia Rev. 1 (1) (RL)Documento44 páginasPL-1784-SSO-02 Plan de Emergencia Rev. 1 (1) (RL)rodrigoAún no hay calificaciones
- Tabla de Conversión Métrica y Decimal PDFDocumento1 páginaTabla de Conversión Métrica y Decimal PDFJose Antonio Andrade CruzAún no hay calificaciones
- Diagrama de Fuerza Cortante y Momento FlexionanteDocumento7 páginasDiagrama de Fuerza Cortante y Momento FlexionanteJennifer Huaman GuzmanAún no hay calificaciones
- Manual de OperadorDocumento128 páginasManual de OperadorGerald Leon FloresAún no hay calificaciones
- Estructura Estáticamente Indeterminada o Estructura HiperestáticaDocumento3 páginasEstructura Estáticamente Indeterminada o Estructura HiperestáticaDiana Chávez100% (1)
- Pintura Base SolventeDocumento5 páginasPintura Base SolventeJESA CONSTRUCCIONESAún no hay calificaciones
- Curso Project BarranquillaDocumento1 páginaCurso Project Barranquillablue_n_blueAún no hay calificaciones
- L10027 Procedimiento de Revisión Hidráulica SM 930E-4Documento16 páginasL10027 Procedimiento de Revisión Hidráulica SM 930E-4Emmanuel Torres HerreraAún no hay calificaciones
- Clase 9 E514 2014 Diagramas de Momento y CorteDocumento28 páginasClase 9 E514 2014 Diagramas de Momento y CorteJaviera Pizarro FloresAún no hay calificaciones
- Resistencia de MaterialesDocumento61 páginasResistencia de MaterialesMiyagui Nasvey Santizo67% (3)
- Empuje de TierrasDocumento11 páginasEmpuje de Tierrasjairo rivas rosalesAún no hay calificaciones
- Informe Rechazo de TratamientoDocumento14 páginasInforme Rechazo de TratamientoRACAún no hay calificaciones
- Área Del Polígono IrregularDocumento4 páginasÁrea Del Polígono IrregularRodrigo C'iAún no hay calificaciones
- P-SI-017 Procedimiento para El Levantamiento Mecánico de CargasDocumento18 páginasP-SI-017 Procedimiento para El Levantamiento Mecánico de CargasYuli RamosAún no hay calificaciones
- CimentacionesDocumento133 páginasCimentacionesJaime Alvarez LiraAún no hay calificaciones
- CERCHAS (Recuperado)Documento12 páginasCERCHAS (Recuperado)Lezama AlveiroAún no hay calificaciones
- Presentacion Asce 31-03Documento36 páginasPresentacion Asce 31-03exquisito3x100% (1)
- Construcción en Mampostería y La Normativa VigenteDocumento103 páginasConstrucción en Mampostería y La Normativa VigenteYoHhanita NimatujAún no hay calificaciones
- Pasadores - EstructurasDocumento13 páginasPasadores - EstructurasEugenio D Paucar RojasAún no hay calificaciones
- Memoria de Cálculo Cabreada Madera CR-14 28-10-2014Documento34 páginasMemoria de Cálculo Cabreada Madera CR-14 28-10-2014Jorge Celano100% (1)
- Ecf 8 2011Documento2 páginasEcf 8 2011CBB PMCHSAún no hay calificaciones
- Zonificación Y MICROzonificación SísmicaDocumento20 páginasZonificación Y MICROzonificación SísmicasolAún no hay calificaciones
- Diseño de EstribosDocumento20 páginasDiseño de EstribosMarcelo QuirozAún no hay calificaciones
- Metodo de Los Elementos Finitos para AnaDocumento287 páginasMetodo de Los Elementos Finitos para AnaYair Antonio Manrique VargasAún no hay calificaciones
- 40 Gestion de Residuos para Mejorar La Productividad en La EmpresaDocumento37 páginas40 Gestion de Residuos para Mejorar La Productividad en La EmpresaMateo Camilo AstudilloAún no hay calificaciones
- Resistencia de Materiales2013Documento830 páginasResistencia de Materiales2013pablopasqualini1850% (2)
- Introduccion Al Analisis Estructural PDFDocumento7 páginasIntroduccion Al Analisis Estructural PDFCesar Yerba ApazaAún no hay calificaciones
- Manual TopografiaDocumento5 páginasManual TopografiaguillermoAún no hay calificaciones
- ALMANAQUE DE PARED 2021 Opción 2Documento1 páginaALMANAQUE DE PARED 2021 Opción 2Cleverts Enrique Dolores Lúcar100% (1)
- Centroides y Momentos de Inercia PracticaDocumento5 páginasCentroides y Momentos de Inercia PracticaFaury FelizAún no hay calificaciones
- Momento de InerciaDocumento15 páginasMomento de InerciaJoao E. Mendoza GonzalesAún no hay calificaciones
- CENTROIDEDocumento9 páginasCENTROIDEPiero Valera EspinoAún no hay calificaciones
- Fuerza DistribuidasDocumento18 páginasFuerza Distribuidasfreykel100% (2)
- Momento de Inercia PDFDocumento8 páginasMomento de Inercia PDFKsystem80% (5)
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- Rub BenitoDocumento4 páginasRub BenitoWilliams David PerezAún no hay calificaciones
- Acta de Taller AevDocumento4 páginasActa de Taller AevWilliams David PerezAún no hay calificaciones
- Rub AngelDocumento4 páginasRub AngelWilliams David PerezAún no hay calificaciones
- Acta de Reunion AevDocumento3 páginasActa de Reunion AevWilliams David PerezAún no hay calificaciones
- Rub ArmindaDocumento4 páginasRub ArmindaWilliams David PerezAún no hay calificaciones
- Rub SergioDocumento4 páginasRub SergioWilliams David PerezAún no hay calificaciones
- Formulario Recepcion de MaterialesDocumento5 páginasFormulario Recepcion de MaterialesWilliams David PerezAún no hay calificaciones
- 2pat Segundo Primaria 2020Documento12 páginas2pat Segundo Primaria 2020Williams David PerezAún no hay calificaciones
- Juegos Educativos de MatematicasDocumento25 páginasJuegos Educativos de MatematicasWilliams David PerezAún no hay calificaciones
- Guía de Fondos de Emergencia y para Que SirveDocumento4 páginasGuía de Fondos de Emergencia y para Que SirveWilliams David PerezAún no hay calificaciones
- Cuaderno Pedagógico 20211Documento308 páginasCuaderno Pedagógico 20211Williams David PerezAún no hay calificaciones
- 1 Diapositiva Envio de LCV Aplicativo FacilitoDocumento7 páginas1 Diapositiva Envio de LCV Aplicativo FacilitoWilliams David PerezAún no hay calificaciones
- Formas para No Malgastar Dinero en 2020 y AhorrarDocumento3 páginasFormas para No Malgastar Dinero en 2020 y AhorrarWilliams David PerezAún no hay calificaciones
- Cartilla de Seguimiento de ObraDocumento1 páginaCartilla de Seguimiento de ObraWilliams David PerezAún no hay calificaciones
- Glass Reinfored Concrete 2018 EspañolDocumento28 páginasGlass Reinfored Concrete 2018 EspañolWilliams David PerezAún no hay calificaciones
- 9 Consejos para Ahorrar Dinero para 2020Documento5 páginas9 Consejos para Ahorrar Dinero para 2020Williams David PerezAún no hay calificaciones
- Constitucion de Sociedad en BoliviaDocumento4 páginasConstitucion de Sociedad en BoliviaWilliams David PerezAún no hay calificaciones
- Reglamento de Aplicación Técnica Administrativa y Financiera de La Ley #1152 " Hacia El Sistema Único de Salud Universal y Gratuito"Documento123 páginasReglamento de Aplicación Técnica Administrativa y Financiera de La Ley #1152 " Hacia El Sistema Único de Salud Universal y Gratuito"Williams David Perez0% (1)
- Planilla de Seguimeinto de ObraDocumento1 páginaPlanilla de Seguimeinto de ObraWilliams David PerezAún no hay calificaciones
- Cartilla de Control de ObraDocumento1 páginaCartilla de Control de ObraWilliams David Perez100% (1)
- Cartel de Competencias, Capacidades y Desempeños. Matemática VII - 2019Documento5 páginasCartel de Competencias, Capacidades y Desempeños. Matemática VII - 2019Miguel IntiAún no hay calificaciones
- Manual Del Usuario de Global MapperDocumento105 páginasManual Del Usuario de Global MapperJCHAHUAJ100% (4)
- Infografía Razonamiento Cuantitativo Saber Pro 2022Documento1 páginaInfografía Razonamiento Cuantitativo Saber Pro 2022Yenny FernandezAún no hay calificaciones
- Estatica Unidad 3Documento20 páginasEstatica Unidad 3pakormz100% (1)
- La Topografía y CartografiaDocumento44 páginasLa Topografía y CartografiaorlandoAún no hay calificaciones
- Tecinas Levantamiento Topografico 1 en 1000Documento88 páginasTecinas Levantamiento Topografico 1 en 1000Juan Alfonso Mamani RamosAún no hay calificaciones
- Angot TresDocumento3 páginasAngot Tresfilo2020Aún no hay calificaciones
- Programación Anual 4to de Secundaria MatemáticaDocumento40 páginasProgramación Anual 4to de Secundaria MatemáticaFredy Teran100% (1)
- Geometria Analitica Charles H Lehmann2 PDFDocumento516 páginasGeometria Analitica Charles H Lehmann2 PDFLugo Cesar OscarAún no hay calificaciones
- VARIOGRAFIADocumento23 páginasVARIOGRAFIAFreddy Calua InfanteAún no hay calificaciones
- Coordenadas PolaresDocumento22 páginasCoordenadas PolaresCristian G. CetroneAún no hay calificaciones
- TallDocumento6 páginasTallLenin AlexanderAún no hay calificaciones
- Elementos Tipo Shell y Membrana en ETABS 2013Documento14 páginasElementos Tipo Shell y Membrana en ETABS 2013FranciscoEscobarAún no hay calificaciones
- Coordenadas GeográficasDocumento2 páginasCoordenadas GeográficasBlackGerd OSAún no hay calificaciones
- Vectores, Sistemas de CoordenadasDocumento27 páginasVectores, Sistemas de CoordenadasAmIn20122100% (2)
- Anexo2 2 - Normas Planos DOH - 2011Documento67 páginasAnexo2 2 - Normas Planos DOH - 2011josue.angelo945950% (2)
- Cálculo Avanzado 3013-IIDocumento202 páginasCálculo Avanzado 3013-IIJohann Yefri KingAún no hay calificaciones
- NTC5043Documento35 páginasNTC5043Carlos F. Macana GonzálezAún no hay calificaciones
- Geometria Analitica en El EspacioDocumento5 páginasGeometria Analitica en El EspacioJose DlcAún no hay calificaciones
- ECASGeometria AnaliticaDocumento14 páginasECASGeometria AnaliticaMarcela Lopez ReyesAún no hay calificaciones
- Libro de Dibujo Tecnico Unsm EcologiaDocumento89 páginasLibro de Dibujo Tecnico Unsm EcologiagabrielAún no hay calificaciones
- GEOGEBRA Trabajo Curvas de Nivel y Sup de RevoluciónDocumento13 páginasGEOGEBRA Trabajo Curvas de Nivel y Sup de RevoluciónAlba LemaAún no hay calificaciones
- Direcciones de Celdas y Nataciones de Planos CristograficosDocumento10 páginasDirecciones de Celdas y Nataciones de Planos CristograficosArOn LorenzanaAún no hay calificaciones
- Fisica Ii Secuencia IDocumento17 páginasFisica Ii Secuencia IA Les OchAún no hay calificaciones
- Tema 3-4 Volumenes Por Arandelas y Longitud de ArcoDocumento46 páginasTema 3-4 Volumenes Por Arandelas y Longitud de ArcoYerli Mondragón ChinininAún no hay calificaciones
- Practica 3Documento7 páginasPractica 3DiegoAún no hay calificaciones
- Examen Final Segunda VersiónDocumento2 páginasExamen Final Segunda VersiónJosé Luis Mtz TrujilloAún no hay calificaciones