También podría gustarte
- Derbi Senda 125 4T 2005 Manual Taller ESPDocumento202 páginasDerbi Senda 125 4T 2005 Manual Taller ESPcurritofd167% (3)
- Apunte 2 Montador Electricista Domiciliario 2021-2Documento3 páginasApunte 2 Montador Electricista Domiciliario 2021-2Gabriel EscalanteAún no hay calificaciones
- Powerpoint Locales Con Riesgo de Incendio y ExplosionDocumento26 páginasPowerpoint Locales Con Riesgo de Incendio y ExplosionAntonio PomaresAún no hay calificaciones
- Apuntes EdificiosDocumento22 páginasApuntes EdificiosRICHARD ALVA BARDALESAún no hay calificaciones
- Tema 1-Construcción de Un Transformador Eléctrico de Pequeña PotenciaDocumento16 páginasTema 1-Construcción de Un Transformador Eléctrico de Pequeña PotenciaJaime TancoAún no hay calificaciones
- Diferencias Entre Un Motor Diésel y Uno A GasolinaDocumento5 páginasDiferencias Entre Un Motor Diésel y Uno A GasolinaBironMendoza100% (1)
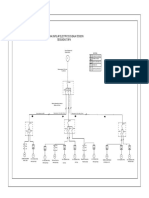
- Diagrama Unifilar Segunda EtapaDocumento1 páginaDiagrama Unifilar Segunda EtapaRolando Arqque100% (1)
- Guia Del Profesor - Maquinas ElectricasDocumento74 páginasGuia Del Profesor - Maquinas ElectricasAlvaroAún no hay calificaciones
- De Los Sistemas Cableados A Los Sistemas ProgramadosDocumento10 páginasDe Los Sistemas Cableados A Los Sistemas ProgramadosMiguel Sanchez BravoAún no hay calificaciones
- Curso para Ayudante Eléctrico Electricidad - BásicaDocumento76 páginasCurso para Ayudante Eléctrico Electricidad - BásicaAlfredo Martinez ContrerasAún no hay calificaciones
- 06b Maquinas Electricas y Reparacion ElectrodomesticosDocumento36 páginas06b Maquinas Electricas y Reparacion ElectrodomesticosMarco Medina100% (1)
- Guia ElectrotecniaDocumento12 páginasGuia ElectrotecniaIvan Miguel Londoño SilvaAún no hay calificaciones
- Automatismos Industriales PDFDocumento6 páginasAutomatismos Industriales PDFjhamsar100% (1)
- Arranque de Un Motor Monofasico Con Capacitor yDocumento16 páginasArranque de Un Motor Monofasico Con Capacitor yJonathan CamarilloAún no hay calificaciones
- PG Maquinas Electricas 2ºIEA 14-15Documento50 páginasPG Maquinas Electricas 2ºIEA 14-15Edison CatotaAún no hay calificaciones
- Electrotecnia S14Documento6 páginasElectrotecnia S14Pedro Martin Quiroz TapiaAún no hay calificaciones
- Unidad Didáctica Sistemas Automatizados: Lógica Programada: ObjetivosDocumento9 páginasUnidad Didáctica Sistemas Automatizados: Lógica Programada: ObjetivosMª ANGELES MARTINEZ SALMERONAún no hay calificaciones
- Proyecto Integrador 3 Semestre PDFDocumento3 páginasProyecto Integrador 3 Semestre PDFPaola Andrea Bermeo QuinayasAún no hay calificaciones
- Ejercicios de Cintas y Esquemas PodadosDocumento4 páginasEjercicios de Cintas y Esquemas PodadosAntonio Herrerías SanabriaAún no hay calificaciones
- Elaboracion de La Documentacion Tecnica Segun El Rebt para La Instalacion de Locales Cert 5162Documento3 páginasElaboracion de La Documentacion Tecnica Segun El Rebt para La Instalacion de Locales Cert 5162Víctor RojasAún no hay calificaciones
- Ejercicios AutomatismosDocumento8 páginasEjercicios AutomatismosOscar Garcia GerezAún no hay calificaciones
- Eler11 PDFDocumento8 páginasEler11 PDFAbraham Sanchez DelCampoAún no hay calificaciones
- Introduccion Algebra BooleanaDocumento5 páginasIntroduccion Algebra Booleanaライトニンググリーン ドラゴンAún no hay calificaciones
- Borrador Silabo Electricidad BasicaDocumento5 páginasBorrador Silabo Electricidad BasicaYan IrisAún no hay calificaciones
- Guía de Aprendizaje 1 - Principios - ElectricidadDocumento8 páginasGuía de Aprendizaje 1 - Principios - ElectricidadElsy Bivis Muñoz MolanoAún no hay calificaciones
- Proyectos 3 EsoDocumento12 páginasProyectos 3 EsotecnoensenyamentAún no hay calificaciones
- UF0886 1 OdtDocumento11 páginasUF0886 1 OdtManuelMarti42Aún no hay calificaciones
- Gave Levas 099ca00852.03esDocumento60 páginasGave Levas 099ca00852.03esMIGUEL100% (1)
- Maquinas ElectricasDocumento6 páginasMaquinas ElectricasFrancis Garcia GallardoAún no hay calificaciones
- LIBROS-de-Texto-Grado Medio Electricidad y Electronica Salesianos Año 17-18Documento6 páginasLIBROS-de-Texto-Grado Medio Electricidad y Electronica Salesianos Año 17-18Jose Maria Gamez HerraizAún no hay calificaciones
- El Contactor y Sus PartesDocumento16 páginasEl Contactor y Sus PartesJmanuel JmmrAún no hay calificaciones
- TEMA 49 Máquinas Eléctricas de Corriente AlternaDocumento9 páginasTEMA 49 Máquinas Eléctricas de Corriente AlternaEmilio Laguna RoderoAún no hay calificaciones
- Tema 7 Motores de Corriente AlternaDocumento20 páginasTema 7 Motores de Corriente AlternaMario Marquez100% (1)
- Practica 3 Mando 2motores Restriccion de Arranque y ParadaDocumento3 páginasPractica 3 Mando 2motores Restriccion de Arranque y ParadaJonnathan Tobayz100% (1)
- Inversor de Giro de Un Motor Trifasico Jaula ArdillaDocumento3 páginasInversor de Giro de Un Motor Trifasico Jaula Ardillajarm2123ifyAún no hay calificaciones
- Resumen Tema 2 AutomatismosDocumento3 páginasResumen Tema 2 AutomatismosMiguelAún no hay calificaciones
- InversoresDocumento18 páginasInversoresJosé Humberto Apodaca Ayala100% (1)
- TEMA 6. - Puesta en Servicio de Las Instalaciones ElectrotécnicasDocumento20 páginasTEMA 6. - Puesta en Servicio de Las Instalaciones ElectrotécnicasAntonio Jesús López RomeroAún no hay calificaciones
- Autin 1ieaDocumento59 páginasAutin 1ieaMa SiluAún no hay calificaciones
- Manual Analizador de Red Circutor c80Documento25 páginasManual Analizador de Red Circutor c80cast01Aún no hay calificaciones
- Componentes de ControlDocumento31 páginasComponentes de ControlalvaritoignacioAún no hay calificaciones
- Energia Fotovoltaica SolarDocumento18 páginasEnergia Fotovoltaica Solarruben martinez fernandezAún no hay calificaciones
- Actividades Inst Electricas Viviendas PDFDocumento13 páginasActividades Inst Electricas Viviendas PDFcarlosm6669Aún no hay calificaciones
- Proyecto y Diseño Electromecanico Bibliografia de CatedraDocumento12 páginasProyecto y Diseño Electromecanico Bibliografia de CatedravanesaAún no hay calificaciones
- Modulo I I Submodulo 1 Suelda Piezas Metálicas FerrosasDocumento21 páginasModulo I I Submodulo 1 Suelda Piezas Metálicas FerrosasJose Raul Reyes Dominguez100% (1)
- NTR 03 Redes Aereas de Baja TensionDocumento35 páginasNTR 03 Redes Aereas de Baja TensionomarAún no hay calificaciones
- Lamparas HID PDFDocumento14 páginasLamparas HID PDFAnonymous ObwXjr1QORAún no hay calificaciones
- 2.4 Hasta 2.4.2Documento6 páginas2.4 Hasta 2.4.2Elissa PeñaAún no hay calificaciones
- ET21-1-A0 Monofásica Trifásica Aérea1 PDFDocumento7 páginasET21-1-A0 Monofásica Trifásica Aérea1 PDFRedes Coop Luque0% (1)
- Sistemas Electrónicos TemarioDocumento7 páginasSistemas Electrónicos TemarioRicardo FríasAún no hay calificaciones
- Caracteristicas y Aplicaciones de Los Motores EléctricosDocumento5 páginasCaracteristicas y Aplicaciones de Los Motores EléctricosrafaelAún no hay calificaciones
- Sensor de Temperatura PDFDocumento16 páginasSensor de Temperatura PDFJuan Luis Uribe ArellanoAún no hay calificaciones
- Teoría y Tecnología Fundamentales - Luis Flower Leiva PDFDocumento106 páginasTeoría y Tecnología Fundamentales - Luis Flower Leiva PDFCarmenza SanchezAún no hay calificaciones
- Manual de Prácticas de Electrónica Analógica II 2019Documento38 páginasManual de Prácticas de Electrónica Analógica II 2019Pedro ChavarriaAún no hay calificaciones
- Silabo de Redes Industriales - 2021 - 1Documento5 páginasSilabo de Redes Industriales - 2021 - 1BridenEspinozaAún no hay calificaciones
- TRANSFORMADORESDocumento28 páginasTRANSFORMADORESterry chirinos100% (1)
- ICT Solucionario Presentacion PDFDocumento13 páginasICT Solucionario Presentacion PDFtxoske0% (2)
- Proceso Del AceroDocumento17 páginasProceso Del AceroLeonardo GonzálezAún no hay calificaciones
- Apuntes Taller de ElectricidadDocumento14 páginasApuntes Taller de ElectricidadJuan JoséAún no hay calificaciones
- Montaje eléctrico de instalaciones solares térmicas. ENAE0208De EverandMontaje eléctrico de instalaciones solares térmicas. ENAE0208Aún no hay calificaciones
- Instalación y mantenimiento de aparatos sanitarios de uso doméstico. IMAI0108De EverandInstalación y mantenimiento de aparatos sanitarios de uso doméstico. IMAI0108Aún no hay calificaciones
- Tema 5 - Motores Trifásicos de InducciónDocumento50 páginasTema 5 - Motores Trifásicos de InducciónXperience Videos de gta v y masAún no hay calificaciones
- Códigos de AveríaDocumento61 páginasCódigos de AveríaDiogenes CastroAún no hay calificaciones
- Primera Clase Acoplamientos MecanicosDocumento112 páginasPrimera Clase Acoplamientos MecanicosJhuly Haro0% (1)
- Codigos CNC ManufacturaDocumento4 páginasCodigos CNC ManufacturaKarenSugeyTorresBAún no hay calificaciones
- MecanismosDocumento48 páginasMecanismosJuanFernandezAún no hay calificaciones
- 085-23 Informe - Farmacia Universal 2023Documento11 páginas085-23 Informe - Farmacia Universal 2023jose alfredo patiñoAún no hay calificaciones
- Diferenciales - ScooptramDocumento101 páginasDiferenciales - ScooptramManuel100% (1)
- Unidad 6 Elementos de Señal y de MandoDocumento23 páginasUnidad 6 Elementos de Señal y de MandoJose Montaño FloresAún no hay calificaciones
- Tracción 4x4Documento19 páginasTracción 4x4Abraham LaricoAún no hay calificaciones
- Mec Actividad 6Documento3 páginasMec Actividad 6Anderson CardenasAún no hay calificaciones
- Automatismos EléctricosDocumento45 páginasAutomatismos EléctricosYuliana MaríaAún no hay calificaciones
- Motocultores AgriaDocumento12 páginasMotocultores AgriajineteIVAún no hay calificaciones
- Problemas de Ruedas de Friccion PDFDocumento4 páginasProblemas de Ruedas de Friccion PDFVicentMaríSánchezAún no hay calificaciones
- Manual de Servicio Tecnico Autorizado PDFDocumento57 páginasManual de Servicio Tecnico Autorizado PDFMauricio alberto guapachaAún no hay calificaciones
- SDC 701 Scanner Diesel CargoDocumento16 páginasSDC 701 Scanner Diesel Cargolars_arAún no hay calificaciones
- Informe de Motores MarinosDocumento12 páginasInforme de Motores Marinosfernando ALUME URETAAún no hay calificaciones
- Partes Componentes de Un Motor de Combustión InternaDocumento14 páginasPartes Componentes de Un Motor de Combustión InternaUbeimar SnaiderAún no hay calificaciones
- Apunte Torno 3er Ac3b1oDocumento8 páginasApunte Torno 3er Ac3b1oMiki GrauAún no hay calificaciones
- Sistema de Distribucion Del MotorDocumento42 páginasSistema de Distribucion Del MotorTecnofutura Tec100% (1)
- Informe Tecnico 1Documento8 páginasInforme Tecnico 1Gustavo Herbas AndiaAún no hay calificaciones
- Accesorios de La MáquinaDocumento7 páginasAccesorios de La Máquinajesus landa galarzaAún no hay calificaciones
- Consumo de Aceite para Motores DieselDocumento3 páginasConsumo de Aceite para Motores DieselRossman MejicanosAún no hay calificaciones
- NuevoDocumento17 páginasNuevoMauricio VargasAún no hay calificaciones
- Circuitos NeumaticoDocumento5 páginasCircuitos NeumaticoaldoAún no hay calificaciones
- GW Service Manual-1-60.en - EsDocumento60 páginasGW Service Manual-1-60.en - EsCarlosAún no hay calificaciones
- Cuaderno de Informe 1 Tren de PotenciaDocumento17 páginasCuaderno de Informe 1 Tren de PotenciaEsther RMAún no hay calificaciones
- Fundamento Teórico TornillosDocumento8 páginasFundamento Teórico TornillosAnthony Flores ObandoAún no hay calificaciones
- Análisis de Rotor DesfibradoraDocumento4 páginasAnálisis de Rotor DesfibradoraKevin Fernando Ramos RivasAún no hay calificaciones