También podría gustarte
- SIMÓ - Modelado y Simulación Dinámica Del Robot Industrial Staübli Unimation PUMA 560Documento104 páginasSIMÓ - Modelado y Simulación Dinámica Del Robot Industrial Staübli Unimation PUMA 560ChuxoMéndezAún no hay calificaciones
- Importancia Delta Dirac ADCDocumento25 páginasImportancia Delta Dirac ADCMax100% (1)
- 2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Documento22 páginas2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Carlos Capuñay NuñezAún no hay calificaciones
- Estimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareDe EverandEstimación de canal MIMO en ondas milimétricas mediante motores de juegos y aceleración por HardwareAún no hay calificaciones
- Cinemática y dinámica de robots manipuladoresDe EverandCinemática y dinámica de robots manipuladoresAún no hay calificaciones
- Toolbox Robotica en MatlabDocumento35 páginasToolbox Robotica en MatlabWilliams Ayala100% (1)
- Tutoriales Ros PDFDocumento23 páginasTutoriales Ros PDFVirginia Solorzano100% (1)
- Efectores y PrecisionDocumento29 páginasEfectores y PrecisionEli D'KidAún no hay calificaciones
- Analisis de Un Robot Manipulador Scara ARTICULODocumento22 páginasAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Aún no hay calificaciones
- Datos Tecnicos de Brazos RoboticosDocumento9 páginasDatos Tecnicos de Brazos RoboticosAndrés MoralesAún no hay calificaciones
- Sew Mdx61b EncoderDocumento72 páginasSew Mdx61b EncoderEva SuárezAún no hay calificaciones
- Tesis Prototipo de Robot Móvil TeleoperadoDocumento107 páginasTesis Prototipo de Robot Móvil TeleoperadoGerson DepablosAún no hay calificaciones
- PDF Matlab Rotar y Trasladar Funciones 2d y 3d Version Mejorada DLDocumento52 páginasPDF Matlab Rotar y Trasladar Funciones 2d y 3d Version Mejorada DLdokuAún no hay calificaciones
- Crea Robot Con MATLABDocumento10 páginasCrea Robot Con MATLABAndre Williams Montenegro SalcedoAún no hay calificaciones
- Cinematica Directa e Inversa-2009Documento64 páginasCinematica Directa e Inversa-2009Betoys58580100% (1)
- Robótica IndustrialDocumento29 páginasRobótica IndustrialMarvel Antonio Oviedo CasasAún no hay calificaciones
- Práctica RobóticaDocumento11 páginasPráctica RobóticaRichi PérezAún no hay calificaciones
- Robot Seguidor de LineaDocumento4 páginasRobot Seguidor de Lineacheco66666Aún no hay calificaciones
- 6to RoboticaDocumento11 páginas6to RoboticaAlfredoAún no hay calificaciones
- Practica#7Documento10 páginasPractica#7Alexiz CuAún no hay calificaciones
- Tema 2 - Morfología Del RobotDocumento44 páginasTema 2 - Morfología Del RobotDulce VelizAún no hay calificaciones
- Práctica Modelamiento Con MatlabDocumento10 páginasPráctica Modelamiento Con MatlabAlejandro CañarAún no hay calificaciones
- Comunicación Serial - Conceptos Generales - National Instruments PDFDocumento4 páginasComunicación Serial - Conceptos Generales - National Instruments PDFStefy AlanizAún no hay calificaciones
- Curso de Programación RobotstudioDocumento1 páginaCurso de Programación RobotstudioAlejandra A GuevaraAún no hay calificaciones
- Historia de La RoboticaDocumento14 páginasHistoria de La RoboticaSergio BoccheciampeAún no hay calificaciones
- 8 Cinematica Robots MovilesDocumento52 páginas8 Cinematica Robots MovilesJavier Luna Victoria WenzelAún no hay calificaciones
- Seleccion de RobotsDocumento10 páginasSeleccion de RobotsJonnathan Raúl DíazAún no hay calificaciones
- TransmisiÓn ArmonicaDocumento29 páginasTransmisiÓn Armonicaapi-3711530100% (2)
- 5.-Presentacion-Aplicaciones Del Jacobiano PDFDocumento32 páginas5.-Presentacion-Aplicaciones Del Jacobiano PDFAnaliz S. Acosta AlvinoAún no hay calificaciones
- RobóticaDocumento30 páginasRobóticaMTI. Adrián Fuentes JiménezAún no hay calificaciones
- Proyecto Robotica FinalDocumento19 páginasProyecto Robotica FinalJose Cadima TronAún no hay calificaciones
- Seguidor de Linea BasicoDocumento10 páginasSeguidor de Linea BasicoRaul CadeteAún no hay calificaciones
- Matrices de Transformación HomogéneaDocumento17 páginasMatrices de Transformación HomogéneaJhonatan Kevin OrozaAún no hay calificaciones
- AgoDic 2012 - Cap 1 IntroDocumento25 páginasAgoDic 2012 - Cap 1 IntroAdrian MorenoAún no hay calificaciones
- Abb RobotDocumento24 páginasAbb RobotGuillermo Ramos TellezAún no hay calificaciones
- AutomatasDocumento8 páginasAutomatasMelvin CussiAún no hay calificaciones
- Practica 1.Documento17 páginasPractica 1.Roberto AguilarAún no hay calificaciones
- Brazo RoboticoDocumento12 páginasBrazo RoboticoSzgabriels SanchezAún no hay calificaciones
- Clase 4. Parte B. Ejemplos de Programación en MicrowinDocumento45 páginasClase 4. Parte B. Ejemplos de Programación en MicrowinDanielAún no hay calificaciones
- Morfología Del RobotDocumento18 páginasMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Epson T-Series Robot Manual Spanish (r9)Documento279 páginasEpson T-Series Robot Manual Spanish (r9)Laboratorios MecatrónicaAún no hay calificaciones
- DISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)Documento4 páginasDISEÑO Y CONSTRUCCION DE UN ROBOT EXPLORADOR (Resumen)joseiutAún no hay calificaciones
- Manual Del Usuario IRC5Documento408 páginasManual Del Usuario IRC5JunanAún no hay calificaciones
- Lab Matriz DHDocumento9 páginasLab Matriz DHMao Blanco Rios100% (1)
- Seguidor de LuzDocumento2 páginasSeguidor de LuzKelly DucuaraAún no hay calificaciones
- PRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionDocumento24 páginasPRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionJerry Rodriguez FloresAún no hay calificaciones
- Electroneumatica1 1Documento30 páginasElectroneumatica1 1Alfonso Olguin RuizAún no hay calificaciones
- Introduccion A La RoboticaDocumento101 páginasIntroduccion A La RoboticaSEBASTIAN HUMBERTO RIVAS CIFUENTES100% (1)
- Tranformada ZDocumento12 páginasTranformada ZNabile RodriguezAún no hay calificaciones
- Cinemática Del RobotDocumento16 páginasCinemática Del RobotGerson Siguenza DavalosAún no hay calificaciones
- 1 Introducción A La RobóticaDocumento38 páginas1 Introducción A La RobóticaPedro Angel Villada Sanchez100% (1)
- Brazos RoboticosDocumento12 páginasBrazos RoboticosSantiYaguargosAún no hay calificaciones
- InfoPLC Net Configuracion VersaProDocumento24 páginasInfoPLC Net Configuracion VersaProROMAJUSTE1Aún no hay calificaciones
- Ley de FaradayDocumento45 páginasLey de Faradayjose vega javierAún no hay calificaciones
- Practica4 - ROBOTICAS MATLABDocumento15 páginasPractica4 - ROBOTICAS MATLABferocilloAún no hay calificaciones
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDe EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadAún no hay calificaciones
- Mecatrónica: modelado, simulación y control de sistemas físicosDe EverandMecatrónica: modelado, simulación y control de sistemas físicosAún no hay calificaciones
- Circuitos Integrados Digitales CMOS: Análisis y DiseñoDe EverandCircuitos Integrados Digitales CMOS: Análisis y DiseñoAún no hay calificaciones
- Document - Onl Informe TroqueladoDocumento15 páginasDocument - Onl Informe TroqueladoLudwin Salazar ValdiviaAún no hay calificaciones
- Ejercicios de Biofísica para La Escuela de Enfermeria - OkDocumento2 páginasEjercicios de Biofísica para La Escuela de Enfermeria - OkCarlinchi MoyaAún no hay calificaciones
- Lineamientos Reglamentarios para Zona de Alto Riesgo Sísmico Y Aisladores SismicosDocumento58 páginasLineamientos Reglamentarios para Zona de Alto Riesgo Sísmico Y Aisladores SismicosIsaac Trujillo OrtizAún no hay calificaciones
- CASO PRACTICO 1 - Entornos Energético - Juan Diego Farfán BermúdezDocumento4 páginasCASO PRACTICO 1 - Entornos Energético - Juan Diego Farfán BermúdezJuan Diego Farfan BermudezAún no hay calificaciones
- Efecto FotoElectricoDocumento9 páginasEfecto FotoElectricoChino LoqiyoAún no hay calificaciones
- Fis2° CoulombDocumento5 páginasFis2° CoulombGisele RamírezAún no hay calificaciones
- UD3 SolucionarioTecn - eingenieriaII 2bachilleratoDocumento16 páginasUD3 SolucionarioTecn - eingenieriaII 2bachilleratoygalvezinfantesAún no hay calificaciones
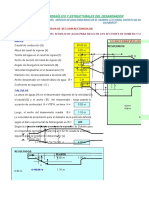
- DesarenadorDocumento25 páginasDesarenadorArteaga Rey EulerAún no hay calificaciones
- Ej3 Sensores Resistivos (1) TEMA3Documento9 páginasEj3 Sensores Resistivos (1) TEMA3juan mAún no hay calificaciones
- Teoria de La RelatividadDocumento4 páginasTeoria de La Relatividadjohn jerson ramos torresAún no hay calificaciones
- Fisica 1 Movimiento UniformeDocumento3 páginasFisica 1 Movimiento UniformeZapataLugardoBenjaminAún no hay calificaciones
- Diseño de Miembros de Acero A Flexión y Corte: - Método Del Trabajo Virtual - Localización de La Articulación Plástica PorDocumento14 páginasDiseño de Miembros de Acero A Flexión y Corte: - Método Del Trabajo Virtual - Localización de La Articulación Plástica Pordiana carolina sanchez mendozaAún no hay calificaciones
- Sesión 1.2Documento25 páginasSesión 1.2Anthony AvalosAún no hay calificaciones
- Lineas de Influencia CualitativasDocumento7 páginasLineas de Influencia CualitativasCesar Andres Mori GomezAún no hay calificaciones
- Informe ColisionesDocumento11 páginasInforme ColisionesCamila GarciaAún no hay calificaciones
- K51 Bonilla Arizmendi Manuel ExamenU1 PDFDocumento3 páginasK51 Bonilla Arizmendi Manuel ExamenU1 PDFCruz Antonio EspinosaAún no hay calificaciones
- Memoria de CalculoDocumento25 páginasMemoria de CalculoKelvin Torrejon ChavezAún no hay calificaciones
- Guia Cuerpo Rigido IDocumento12 páginasGuia Cuerpo Rigido IDario GimenezAún no hay calificaciones
- EG - Fisica I - GIERM - Tema 9 - Movimiento Oscilatorio - 12-13Documento17 páginasEG - Fisica I - GIERM - Tema 9 - Movimiento Oscilatorio - 12-13Valero Diago SaulAún no hay calificaciones
- Memory 2Documento120 páginasMemory 2esshgAún no hay calificaciones
- Torsión - ProblemasDocumento7 páginasTorsión - ProblemasJuan Vasquez Gutierrez0% (2)
- Taller Propiedades 2017-01Documento8 páginasTaller Propiedades 2017-01Felipe RestrepoAún no hay calificaciones
- 5.. Superposicion de OndasDocumento9 páginas5.. Superposicion de OndasDanilo SalcedoAún no hay calificaciones
- TribometroDocumento83 páginasTribometromigulivn2277Aún no hay calificaciones
- Guia Ejercicios DinamicaDocumento45 páginasGuia Ejercicios DinamicaRubinno TtitoAún no hay calificaciones
- Informe Laboratorio 15 Pendulo SimpleDocumento14 páginasInforme Laboratorio 15 Pendulo SimpleAgustín MorenoAún no hay calificaciones
- Método-de-las-Fuerzas - Mtro. JazanDocumento10 páginasMétodo-de-las-Fuerzas - Mtro. JazanFredyAún no hay calificaciones
- Laboratorio 3 FisicaDocumento5 páginasLaboratorio 3 FisicaJuan Vargas21Aún no hay calificaciones
- Métodos EspectrofotométricosDocumento2 páginasMétodos EspectrofotométricosEri MalvasAún no hay calificaciones
- Unidad 3Documento17 páginasUnidad 3angel olmosAún no hay calificaciones