También podría gustarte
- Sistema ParaleloDocumento10 páginasSistema ParalelobrandonAún no hay calificaciones
- Comandos CMDDocumento18 páginasComandos CMDJuanes FerbizAún no hay calificaciones
- Tomo 4Documento12 páginasTomo 4LucasPalombaAún no hay calificaciones
- Sistemas Informaticos DAMDocumento365 páginasSistemas Informaticos DAMYasmina Sosa0% (1)
- SALA CONSTITUCIONAL Tutela Judicial de La VictimaDocumento16 páginasSALA CONSTITUCIONAL Tutela Judicial de La VictimaRafael Morales100% (1)
- Modelo Cuestionario Auditoria InformaticaDocumento10 páginasModelo Cuestionario Auditoria InformaticaClaudia ParedesAún no hay calificaciones
- Tesis. Análisis Del Delito de Manejo Fraudulento de Tarjetas Inteligentes o Instrumentos Analogos en El Ordenamiento Jurídico VenezolanoDocumento126 páginasTesis. Análisis Del Delito de Manejo Fraudulento de Tarjetas Inteligentes o Instrumentos Analogos en El Ordenamiento Jurídico VenezolanoPaola Arrias-MejiasAún no hay calificaciones
- CAPITULO I Tesis Pedo HidalgoDocumento9 páginasCAPITULO I Tesis Pedo HidalgoPitter Jose Hidalgo NuñezAún no hay calificaciones
- Derecho AmbientalDocumento20 páginasDerecho AmbientalJosé NievesAún no hay calificaciones
- Consignacion InquilinariaDocumento2 páginasConsignacion InquilinariaChristian OchoaAún no hay calificaciones
- Sentencia 01Documento64 páginasSentencia 01joserafaelvargasAún no hay calificaciones
- Guia Del Prof. Ley Orgánica Procesal Del TrabajoDocumento12 páginasGuia Del Prof. Ley Orgánica Procesal Del TrabajoCarmen Ontiveros100% (1)
- Privilegios y Publicidad de Las GarantíasDocumento8 páginasPrivilegios y Publicidad de Las GarantíasYulianny HernándezAún no hay calificaciones
- Escrito de Amparo Constitucional Habeas CorpusDocumento4 páginasEscrito de Amparo Constitucional Habeas CorpusJesus Dondiers100% (1)
- Ensayo Proc Civil Diferencias Proc Ordinario BreveDocumento4 páginasEnsayo Proc Civil Diferencias Proc Ordinario Brevemangutero12Aún no hay calificaciones
- Escritos JudicialesDocumento20 páginasEscritos JudicialesRafael Ber100% (1)
- Indice de Leyes A JUNIO 2018 PDFDocumento104 páginasIndice de Leyes A JUNIO 2018 PDFSantiago D Jesús Méndez MéndezAún no hay calificaciones
- Cuáles Son Las Principales Obligaciones de Un Responsable de Ficheros de Datos PersonalesDocumento2 páginasCuáles Son Las Principales Obligaciones de Un Responsable de Ficheros de Datos PersonalesJuan Carlos ArcadipaneAún no hay calificaciones
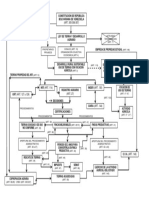
- Mapa Mental Ley de TierrasDocumento1 páginaMapa Mental Ley de Tierrasjose davilaAún no hay calificaciones
- Carta Petitorio Formato Justo Valor y Canon Arrendador-1Documento2 páginasCarta Petitorio Formato Justo Valor y Canon Arrendador-1MelissaAún no hay calificaciones
- Decreto 2231 Creación CAMIMPEG 2016Documento3 páginasDecreto 2231 Creación CAMIMPEG 2016Rossimar Rodriguez100% (1)
- Retardo PerjudicialDocumento76 páginasRetardo PerjudicialPurificación Polentino ManjarresAún no hay calificaciones
- La Sociedad IrregularDocumento12 páginasLa Sociedad IrregularPablo Emilio Rivas ColmenaresAún no hay calificaciones
- Jurisprudencia TSJ de VenezuelaDocumento31 páginasJurisprudencia TSJ de VenezuelaConcejo JimenezAún no hay calificaciones
- Demanda de Quiebra. ListoDocumento10 páginasDemanda de Quiebra. ListoMiguel PerezAún no hay calificaciones
- Proyecto de Trabajo de Grado 2018 Si VaDocumento23 páginasProyecto de Trabajo de Grado 2018 Si Vamiguel martinoAún no hay calificaciones
- Fuentes de Derecho Adjetivo Del TrabajoDocumento9 páginasFuentes de Derecho Adjetivo Del TrabajoNorelbis SanojaAún no hay calificaciones
- Derecho Administrativo IVDocumento141 páginasDerecho Administrativo IVLuis David Espinoza CadenasAún no hay calificaciones
- DIP Temas 20, 21 y 22Documento10 páginasDIP Temas 20, 21 y 22Richard J Perez100% (1)
- SALA CONSTITUCIONAL Sentencia 956Documento13 páginasSALA CONSTITUCIONAL Sentencia 956Jorge Leonardo Hidalgo RodriguezAún no hay calificaciones
- Doctrina de La SCC-TSJ 2006Documento180 páginasDoctrina de La SCC-TSJ 2006Hector Caicedo100% (1)
- Exposicion de Motivos y Ley Penal Del AmbienteDocumento27 páginasExposicion de Motivos y Ley Penal Del AmbientetomasAún no hay calificaciones
- Tema 2 Sitio de Suceso TeoriaDocumento9 páginasTema 2 Sitio de Suceso TeoriaNissel MarquezAún no hay calificaciones
- REPÚBLICA BOLIVARIANA DE VENEZUELA-laboralDocumento6 páginasREPÚBLICA BOLIVARIANA DE VENEZUELA-laboralMauricio PerniaAún no hay calificaciones
- Resumen ContenciosoDocumento6 páginasResumen Contenciosoglairys herreraAún no hay calificaciones
- Importancia Del Derecho Agrario para VenezuelaDocumento3 páginasImportancia Del Derecho Agrario para VenezuelaRonald DuranAún no hay calificaciones
- Ley Orgánica de Procedimientos Administrativos VigenteDocumento22 páginasLey Orgánica de Procedimientos Administrativos VigenteOMAR MARTINEZ100% (1)
- Tema 1. El Estado de Derecho. Contencioso AdministrativoDocumento9 páginasTema 1. El Estado de Derecho. Contencioso AdministrativoCesar Davd Carpio RonAún no hay calificaciones
- Ensayo Sobre La Resolución #2014-0001 TSJ (Autoguardado)Documento6 páginasEnsayo Sobre La Resolución #2014-0001 TSJ (Autoguardado)carlos chineaAún no hay calificaciones
- Ensayo Ley de Arrendamientos de Vivienda (Civil 4 y Practica)Documento3 páginasEnsayo Ley de Arrendamientos de Vivienda (Civil 4 y Practica)ANA YURIBEL MARQUINA RANGEL100% (1)
- Tema #12 Separación de Los Patrimonio Del Decujus y Del HerederoDocumento9 páginasTema #12 Separación de Los Patrimonio Del Decujus y Del Herederomarilin_rAún no hay calificaciones
- Procedimiento MarítimoDocumento20 páginasProcedimiento MarítimoSaralee De SibadaAún no hay calificaciones
- Proyecto Socio Jurídico IIIDocumento3 páginasProyecto Socio Jurídico IIINancyAún no hay calificaciones
- Vectores en PHPDocumento26 páginasVectores en PHPCarlos Jadán RomeroAún no hay calificaciones
- Analisis Valle Caura 2Documento8 páginasAnalisis Valle Caura 2roberto rafael rodriguez rodriguezAún no hay calificaciones
- II, 4, 638. Procedimiento en Las Acciones de Habeas Data. 1-10Documento9 páginasII, 4, 638. Procedimiento en Las Acciones de Habeas Data. 1-10RafaelAún no hay calificaciones
- Efectos Del Proceso. Procesal Civil 1Documento10 páginasEfectos Del Proceso. Procesal Civil 1danielgomez774Aún no hay calificaciones
- Maternidad D FueroDocumento5 páginasMaternidad D FueroAnaGabrielaGonzalezAún no hay calificaciones
- Instituciones Generales de Derecho Internacional Privado Tema 5Documento15 páginasInstituciones Generales de Derecho Internacional Privado Tema 5Enderson Emilio Rivero100% (1)
- Diligencia Solicitando Nombramiento Del DefensorDocumento1 páginaDiligencia Solicitando Nombramiento Del DefensorRemczy E. MárquezAún no hay calificaciones
- Tipos de Condominio MasoDocumento4 páginasTipos de Condominio MasoalexLAún no hay calificaciones
- Resolucion 05 2020 05 Octubre 2020 Sala Casacion Civil TSJDocumento3 páginasResolucion 05 2020 05 Octubre 2020 Sala Casacion Civil TSJhenry caceresAún no hay calificaciones
- Centro de Investigaciones Juridicas Validez Formal de Los Actos Juridicos en El Derecho Internacional Privado Venezolano PDFDocumento3 páginasCentro de Investigaciones Juridicas Validez Formal de Los Actos Juridicos en El Derecho Internacional Privado Venezolano PDFbjsv2011Aún no hay calificaciones
- Nombramiento DefensorDocumento6 páginasNombramiento DefensorRosminaAún no hay calificaciones
- LOTTTDocumento311 páginasLOTTTavallenilla5543Aún no hay calificaciones
- Redes Avanzadas Tema - 1 Configuracion de Equipos de ComunicacionesDocumento10 páginasRedes Avanzadas Tema - 1 Configuracion de Equipos de ComunicacionesAbraham GalindezAún no hay calificaciones
- Guia de Derecho Internacional PrivadoDocumento83 páginasGuia de Derecho Internacional PrivadoLaleska AgreAún no hay calificaciones
- LESIONESDocumento8 páginasLESIONESyaulimar perezAún no hay calificaciones
- Régimen de BienesDocumento5 páginasRégimen de BienesRonald50% (2)
- Procesal Penal III Los RecursosDocumento8 páginasProcesal Penal III Los RecursosErmes Adolfo SuarezAún no hay calificaciones
- Inspectoria Del TrabajoDocumento19 páginasInspectoria Del TrabajoAngel CeballosAún no hay calificaciones
- Documento Compra Venta Casa EGLEE PEREZDocumento2 páginasDocumento Compra Venta Casa EGLEE PEREZVictor VillanuevaAún no hay calificaciones
- 04 Procesamiento en Paralelo PIPELINEDocumento23 páginas04 Procesamiento en Paralelo PIPELINEOmar GDAún no hay calificaciones
- Aic IntroDocumento14 páginasAic IntroAlexander Santos QuinchoAún no hay calificaciones
- Centos 8-8.1Documento5 páginasCentos 8-8.1Soporte PiuraAún no hay calificaciones
- Actividad 2.3Documento8 páginasActividad 2.3Edu VillarAún no hay calificaciones
- Código Fuente - Proyecto Integrador Etapa 3Documento4 páginasCódigo Fuente - Proyecto Integrador Etapa 3Snork ReyesAún no hay calificaciones
- Tema El Gabinete (Case)Documento89 páginasTema El Gabinete (Case)Mamani Nemo GuillermoAún no hay calificaciones
- AbstracciónDocumento1 páginaAbstracciónÅnďy ŘmržAún no hay calificaciones
- Fundamentos de POODocumento76 páginasFundamentos de POOJose Luis Quispe ChalcoAún no hay calificaciones
- DVD 899 Espa OlDocumento27 páginasDVD 899 Espa OlAlba Lucy CorreaAún no hay calificaciones
- Actividad de NavegadoresDocumento3 páginasActividad de NavegadoresSANTIAGO SUAREZ SOLARTEAún no hay calificaciones
- QuanTower ConfiguraciónDocumento10 páginasQuanTower ConfiguraciónJulio ArveloAún no hay calificaciones
- Prácticas Del Libro en ProteusDocumento29 páginasPrácticas Del Libro en ProteusJesus Rene Arocutipa CentellasAún no hay calificaciones
- Computacion IDocumento6 páginasComputacion IfrenesisAún no hay calificaciones
- ANGULARDocumento38 páginasANGULARHerz MiñaAún no hay calificaciones
- Alien Vault PresentacionDocumento132 páginasAlien Vault PresentacionDukeAún no hay calificaciones
- Fase 3 - Telematica - Erika Lorena Suarez MorenoDocumento6 páginasFase 3 - Telematica - Erika Lorena Suarez MorenoMillersamuel SuarezmorenoAún no hay calificaciones
- Recepcion Si Inventario SCB 8 - 5cDocumento2 páginasRecepcion Si Inventario SCB 8 - 5cEDUARD ARISTIZABALAún no hay calificaciones
- Plataformas Operativas y Base de DatosDocumento3 páginasPlataformas Operativas y Base de DatosAnonymous 7rDRBk0% (1)
- Lacnic - Curso Network Management - M11Documento17 páginasLacnic - Curso Network Management - M11Master CursosAún no hay calificaciones
- Java 8 Lambda Expressions (I)Documento6 páginasJava 8 Lambda Expressions (I)Bigotes BigotesAún no hay calificaciones
- CNC Gcode Sender - 3 Steps - InstructablesDocumento4 páginasCNC Gcode Sender - 3 Steps - InstructablesDaru SanAún no hay calificaciones
- José Orlando Durán Pérez - POO - Práctica 13Documento5 páginasJosé Orlando Durán Pérez - POO - Práctica 13Just DuránAún no hay calificaciones
- Software de Registro CivilDocumento3 páginasSoftware de Registro CivilDavid W. Quispe AquinoAún no hay calificaciones
- Lab13 Cyt PDFDocumento11 páginasLab13 Cyt PDFEnder Thiago Montoya MendozaAún no hay calificaciones
- Tutorial Midi Ox. BDocumento5 páginasTutorial Midi Ox. BpercusioneroAún no hay calificaciones
- 1.4-Connector-Python - by - Ricardo MamaníDocumento20 páginas1.4-Connector-Python - by - Ricardo Mamanígomezmauroleonel3Aún no hay calificaciones
- Mantenimiento PreventivoDocumento22 páginasMantenimiento PreventivoJahider BuenañoAún no hay calificaciones
- GrupoA-Investigacion Sobre SassDocumento8 páginasGrupoA-Investigacion Sobre SasstitobesaleelAún no hay calificaciones