Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Introducción Al Cálculo Variacional Gonzalo Galeano
Cargado por
Jose Eduardo Barriga RuaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Introducción Al Cálculo Variacional Gonzalo Galeano
Cargado por
Jose Eduardo Barriga RuaCopyright:
Formatos disponibles
Introducci on al C alculo Variacional
Gonzalo Galiano, 2003
Indice general
Introducci on V
Tres problemas cl asicos V
El problema de la braquistocrona V
El problema de las geod esicas VII
El problema isoperim etrico VII
M etodos de resoluci on de los problemas variacionales VII
M etodos indirectos VIII
M etodos directos VIII
Captulo 1. Analogas entre el C alculo Diferencial y el C alculo Variacional 1
1. Optimizaci on en dimensi on nita 1
2. Paso a dimensi on innita 1
Captulo 2. La ecuaci on de Euler y las condiciones de Legendre 7
1. Problemas variacionales con fronteras jas en una variable 7
2. Generalizaciones del problema con fronteras jas 13
2.1. El caso de varias variables 13
2.2. El caso de varias inc ognitas 15
2.3. Funcionales que dependen de las derivadas de orden superior 17
2.4. Problemas variacionales con restricciones 17
3. Variaci on general de un funcional 23
3.1. Deducci on de la f ormula b asica 23
Captulo 3. Las condiciones de Jacobi 27
1. Introducci on 27
2. Condici on necesaria de Jacobi 28
3. Condici on de Jacobi. Condiciones sucientes para un mnimo 33
4. Relaci on entre la condici on de Jacobi y la teora de formas cuadr aticas 35
Captulo 4. Introducci on a los m etodos directos. El m etodo de Ritz 39
1. Sucesiones minimizantes 39
2. El m etodo de Ritz 41
III
IV
INDICE GENERAL
Bibliografa 43
Introducci on
Tres problemas cl asicos
A continuaci on introducimos tres ejemplos cl asicos del C alculo de Variaciones, en los que se
muestran los elementos fundamentales del problema tipo de optimizaci on. Son estos:
1. Un espacio de funciones, V , tal que u : R
q
, donde es una abierto, normalmente
acotado, de R
n
, de frontera, , regular.
2. Restricciones sobre el conjunto de soluciones, que pueden imponerse bien sobre la fron-
tera , bien sobre el dominio . Por ejemplo u = 0 en , u en , etc. El conjunto
de funciones que satisfacen estas restricciones es, en general, un subconjunto, U de V .
3. Un funcional J : V R de la forma siguiente:
(1) J(u) :=
_
L(x, u(x), u
(x))dx.
Naturalmente, las hip otesis sobre V y L deben asegurar la existencia de J sobre V , o al
menos sobre U.
El problema de optimizaci on consiste en hallar el mnimo, u U, del funcional J.
El problema de la braquistocrona. El problema de la braquistocrona, o curva de descenso
m as r apido, es uno de los problemas m as antiguos del c alculo de variaciones. La primera solu-
ci on fue dada por Johann Bernoulli en 1696, aunque tambi en dieron soluciones algunos contem-
por aneos suyos como Jacob Bernoulli, Leibniz y Newton.
Entre todas las curvas que unen los puntos A y B, se desea hallar aquella a lo largo de la cual
un punto material, movi endose bajo la fuerza de la gravedad desde A llega al punto B en el menor
tiempo.
Para resolver este problema debemos considerar todas las posibles curvas que unen A y B. A
una determinada curva, , le corresponder a un valor determinado, T, del tiempo invertido para el
descenso del punto material a lo largo de ella. El tiempo, T, depender a de la elecci on de . De
todas las curvas que unen A con B debemos hallar aquella a la que corresponda el menor valor de
T. El problema puede plantearse de la siguiente forma.
Tracemos un plano vertical que pase por los puntos A y B. La curva de m as r apido descenso
debe evidentemente estar en el, as que podemos restringirnos a curvas sobre dicho plano. To-
memos el punto A como el origen de coordenadas, el eje OX apuntando en la direcci on de la
V
VI INTRODUCCI
ON
gravedad y sea B = (x
1
, y
1
), con x
1
> 0 y y
1
0. Consideremos una curva arbitraria descrita
por la ecuaci on
(2) y = y(x) 0 x x
1
,
donde y es una funci on regular. Como la curva pasa por A y B, la funci on y debe vericar
(3) y(0) = 0, y(x
1
) = y
1
.
El movimiento de la masa puntual puede describirse por medio de la ley de la conservaci on de la
energa, E
c
+E
p
= cte., del siguiente modo: En el punto A, en el que asumimos que la velocidad
inicial es nula, se tiene
E
c
+ E
p
= E
p
= mgh
A
= E,
donde E > 0 es una constante y h
A
es la altura a la que se encuentra el punto A. En cualquier
punto por debajo ser a
1
2
mv
2
+ mgh = E,
luego
v
2
= 2g(h
A
h),
y tomando la coordenada vertical como x = h
A
h, deducimos que la velocidad del movimiento
del punto material es
v
ds
dt
=
_
2gx,
siendo s una parametrizaci on de la trayectoria del punto material. Deducimos que
dt =
ds
2gx
,
y como la longitud de arco de la curva viene dada por
ds =
_
1 + y
(x)
2
dx,
tenemos que el tiempo empleado a lo largo de la curva y viene dado por
(4) J(y) =
_
x
1
0
_
1 +y
(x)
2
2gx
_
1/2
dx.
Hallar la braquistocrona es equivalente a resolver el siguiente problema de mnimos: entre todas
las posibles funciones (2) que veriquen las condiciones (3), hallar la que corresponda al menor
valor de la integral (4).
M
ETODOS DE RESOLUCI
ON DE LOS PROBLEMAS VARIACIONALES VII
El problema de las geod esicas. Las geod esicas son aquellas curvas contenidas en una super-
cie regular que minimizan la distancia entre dos puntos de la misma. Enunciaremos este problema
de dos formas:
1. Consideremos una supercie regular S R
3
denida por la parametrizaci on
x = x(u, v), y = y(u, v), z = z(u, v),
con (u, v) [u
0
, u
1
] [v
0
, v
1
]. Cualquier curva contenida en S puede parametrizarse en la forma
t : [t
1
, t
2
] (u(t), v(t)).
El elemento de arco de las curvas contenidas en S est a determinado por la primera forma
fundamental:
ds
2
:= Eu
2
+ 2Fu
+ Gv
2
,
con
E := x
2
u
+y
2
u
+z
2
u
, F := x
u
x
v
+ y
u
y
v
+ z
u
z
v
, G := x
2
v
+y
2
v
+z
2
v
.
De modo que la longitud del arco entre los puntos correspondientes a los valores t
1
y t
2
es
J(u, v) =
_
t
2
t
1
_
Eu
2
+ 2Fu
+ Gv
2
dt,
que es el funcional a minimizar.
2. Si la supercie viene dada de forma implcita por (x, y, z) = 0 y representamos una curva
sobre ella de forma param etrica, (x(t), y(t), z(t)), debemos minimizar el funcional
J(x, y, z) =
_
t
1
t
0
_
x
(t)
2
+ y
(t)
2
+z
(t)
2
_
1/2
dt.
Adem as, las funciones x, y y z deben someterse a la condici on (x(t), y(t), z(t)) = 0 para
t [t
0
, t
1
]. Es lo que se llama un problema variacional con restricciones de igualdad.
El problema isoperim etrico. De entre todas las curvas de longitud dada, que unen el punto
(0, 0) con un punto variable (, 0), encontrar aquella que, junto con el eje OX, encierra una super-
cie m axima. El problema es, pues, el de hallar una funci on, u y un n umero, tales que u(0) = 0,
u() = 0, u 0 y que minimicen el funcional
J(u, ) :=
_
0
u,
y satisfagan la restricci on
_
0
_
1 +|u
|
2
= .
M etodos de resoluci on de los problemas variacionales
Existen dos aproximaciones fundamentales a la resoluci on de los problemas variacionales.
VIII INTRODUCCI
ON
M etodos indirectos. La primera de estas aproximaciones es la heredada de los m etodos de
minimizaci on de funciones (dimensi on nita) va el c alculo diferencial. Este m etodo proporciona
condiciones necesarias y condiciones sucientes que dan lugar a una base metodol ogica para la
resoluci on de problemas variacionales, la cual est a ntimamente ligada a la teora de ecuaciones
diferenciales.
M etodos directos. La idea fundamental es la extensi on del Teorema de Weierstrass a funcio-
nes denidas en espacios de dimensi on innita, que tendr a un enunciado del tipo:
Teorema. Sea J : V R un funcional denido en un espacio de funciones V dotado de cierta
noci on de convergencia para la que V es compacto y J es semicontinuo inferiormente. Entonces
existe un mnimo de J en V .
A partir de este teorema, se procede del siguiente modo:
1. Se elije la clase de funciones V junto con una noci on adecuada de convergencia para la
que V sea completo.
2. Hay que mostrar que J est a bien denido en V y que est a acotado inferiormente, de
modo que inf
uV
J(u) sea nito. Esto implica que se puede construir una sucesi on mi-
nimizante, u
k
V , tal que J(u
k
) inf
uV
J(u).
3. Debemos probar que J es semicontinuo inferiormente (secuencialmente), es decir, que
u
k
u implica
J(u) lm
k
J(u
k
).
4. Finalmente, debemos demostrar que V es compacto (secuencialmente) con respecto a la
convergencia considerada en 1.
Las hip otesis del Teorema de Weierstrass ata nen a la funci on que se desea minimizar (se-
micontinuidad inferior) y al conjunto en el cual se busca el mnimo (compacto). En espacios de
dimensi on nita estas hip otesis son relativamente f aciles de comprobar dado que la compacidad de
un conjunto es equivalente a que el mismo sea cerrado y acotado. La continuidad suele deducirse
de un an alisis directo de la funci on a minimizar.
Sin embargo, el Teorema de Riesz establece que la bola unidad cerrada de un espacio de
Banach es compacta si y solo si la dimensi on del espacio es nita. Puesto que este criterio de com-
pacidad falla en el caso de dimensi on innita, se impone la investigaci on de nuevas condiciones
sobre los subconjuntos de espacios de dimensi on innita y sobre los funcionales denidos en estos
espacios que nos permitan usar una generalizaci on del Teorema de Weierstrass.
Puesto que los conjuntos cerrados y acotados, en el sentido de la topologa fuerte, de un espa-
cio de Banach no son compactos, puede esperarse que si se reduce la cantidad de abiertos mediante
M
ETODOS DE RESOLUCI
ON DE LOS PROBLEMAS VARIACIONALES IX
la introducci on de una nueva topologa, la cantidad de cerrados y, por tanto, de compactos, aumen-
te. Esto resulta ser as. En particular, cualquier subconjunto cerrado y acotado de un espacio de
Banach es relativamente compacto respecto la topologa d ebil.
1
El problema que surge a continuaci on es el de la continuidad (respecto la topologa d ebil) del
funcional a minimizar. Claramente, al introducir una topologa con menos abiertos, la cantidad
de funciones continuas tambi en disminuye y as, por ejemplo, la norma asociada a la topologa
fuerte no es una funci on continua respecto la topologa d ebil. Cobra especial importancia en este
contexto la noci on de semicontinuidad inferior.
Finalmente, observemos que aunque la introducci on de la topologa d ebil y de los funcionales
semicontinuos inferiormente respecto dicha topologa nos permiten asegurar la existencia de un
mnimo sobre cualquier conjunto cerrado y acotado respecto la topologa d ebil, la vericaci on
pr actica de estas propiedades dista de ser sencilla. Por ello, una de las cuestiones centrales es
la de la b usqueda de condiciones expresadas respecto a la topologa fuerte que impliquen las
correspondientes respecto a la topologa d ebil. En este contexto la convexidad de conjuntos y
funciones juega un papel fundamental.
1
Es la topologa menos na que hace continuas a las aplicaciones lineales
CAP
ITULO 1
Analogas entre el C alculo Diferencial y el C alculo Variacional
1. Optimizaci on en dimensi on nita
Dada una funci on f : U R, con U un abierto de R
n
, el programa usual que utiliza el c alculo
diferencial para la localizaci on de puntos de mnimo es el siguiente.
En primer lugar, debemos asumir que la funci on posee cierta regularidad, tpicamente que la
funci on posea derivadas parciales segundas continuas, es decir f C
2
(U).
En segundo lugar, resolvemos la ecuaci on de los puntos crticos, es decir, hallamos x
c
U
tales que
f(x
c
) = 0.
En tercer lugar, evaluamos la matriz hessiana de f en los puntos crticos, y comprobamos si
dicha matriz es denida positiva, es decir, si los autovalores asociados a la matriz
_
_
_
_
_
_
2
f
x
2
1
(x
c
) . . .
2
f
x
1
x
n
(x
c
)
2
f
x
2
x
1
(x
c
) . . .
2
f
x
2
xn
(x
c
)
. . . . . . . . .
2
f
xnx
1
(x
c
) . . .
2
f
x
2
n
(x
c
)
_
_
_
_
_
_
son positivos. En caso armativo, x
c
es un punto de mnimo local para f, es decir, existe una bola
de radio centrada en x
c
, B
(x
c
), tal que
f(x
c
) f(x) para todo x B
(x
c
).
2. Paso a dimensi on innita
La cuesti on que surge a continuaci on es la de extender la metodologa de minimizaci on de
funciones denidas en espacios de dimensi on nita a los funcionales descritos en los ejemplos de
la introducci on, los cuales se hayan denidos en espacios de funciones (de dimensi on innita).
Por ejemplo, en el problema de la braquistocrona se trata de minimizar el funcional
J(u) =
_
x
1
0
1 +u
(x)
2
2gx
dx,
con la funci on u : [0, x
1
] R satisfaciendo
u(0) = 0, u(x
1
) = u
1
,
1
2 1. ANALOG
IAS ENTRE EL C
ALCULO DIFERENCIAL Y EL C
ALCULO VARIACIONAL
y alg un requerimiento de regularidad que implique que el funcional J est e bien denido (sea
nito).
Siguiendo los pasos del programa de dimensi on nita, consideramos un funcional J : U R,
con U V , siendo V un espacio de funciones regulares (hay varias elecciones) y siendo U un
subespacio de V , que en el ejemplo de la braquistocrona viene dado por
U = {u V : u(0) = 0, u(x
1
) = u
1
} .
En el caso de dimensi on nita asumimos que la funci on objetivo es dos veces diferenciable
con continuidad. La continuidad de funciones expresa el hecho de que a peque nas variaciones de
la variable independiente se siguen peque nas variaciones del valor de la funci on. En t erminos de
, f es continua en x
0
si para todo > 0 podemos hallar un > 0 tal que para todo x
satisfaciendo x x
0
< se consigue que f(x) f(x
0
) < .
Ahora, en el caso de funcionales, qu e signican peque nas variaciones de la variable inde-
pendiente, siendo esta una funci on? Hay distintas elecciones que se pueden hacer a este respecto.
Por ejemplo, uno puede llamar pr oximas a dos funciones continuas si sus ordenadas est an pr oxi-
mas. En este sentido podemos introducir la norma del supremo y decir que u
0
y u est an pr oximas
respecto esta norma si
u u
0
C()
sup{|u(x) u
0
(x)| : x } < ,
donde es el dominio de denici on de u y u
0
. Otras elecciones tpicas son que tanto las funciones
como sus primeras derivadas o, m as en general, derivadas de orden k, est en cercanas, dando lugar
a los espacios de funciones C
k
(), con norma
u
C
k
()
sup
_
|u(x)| +. . . +|D
k
u(x)| : x
_
.
Otros espacios funcionales que aparecen frecuentemente en las aplicaciones son los espacios
L
p
(), en particular, el espacio de Hilbert L
2
(), con norma dada por
u
L
2
()
_
_
u
2
(x)dx
_
1/2
,
y el espacio de Sobolev H
1
() (que tambi en es un espacio de Hilbert), con norma
u
H
1
()
u
L
2
()
+Du
L
2
()
.
Claramente, los conceptos de proximidad entre funciones depender an del espacio en que estas se
sit uen, como muestra el siguiente ejemplo.
Ejemplo 1. Consideremos la funci on de Heavyside
H(x) =
_
0 si x < 0,
1 si x 0,
2. PASO A DIMENSI
ON INFINITA 3
y una sucesi on de funciones continuas que la aproximan, dadas por
H
n
(x) =
_
_
0 si x < 0,
nx si 0 x 1/n,
1 si x > 1/n,
de modo que
|H(x) H
n
(x)| =
_
_
0 si x < 0,
1 nx si 0 x 1/n,
0 si x > 1/n,
y, por tanto, H H
n
C(R)
= 1, y ning un t ermino de la sucesi on de funciones H
n
est a arbitra-
riamente cerca de H en el sentido de la norma del supremo. Sin embargo, respecto la norma de
L
2
(R), tenemos que
H H
n
L
2
(R)
=
_
_
1/n
0
(1 nx)
2
dx
_
1/2
=
1
3n
,
de modo que para n sucientemente grande podemos hacer H y H
n
tan pr oximas como queramos.
2
Aunque, a primera vista, parecera lo m as natural el buscar los puntos de mnimo de un fun-
cional en espacios grandes como C() o L
p
(), esto no es as. La raz on es que, como puede
intuirse, la continuidad de funcionales del tipo variacional
J(u) =
_
L(x, u(x), u
(x))dx,
va a depender de la continuidad de u
, lo que conduce a la consideraci on del espacio C
1
() o, al
menos, H
1
(). Puesto que las t ecnicas que usaremos pasan por m etodos analticos usuales, como
el paso al lmite, la continuidad del funcional jugar a un papel importante.
El siguiente paso en nuestra generalizaci on del m etodo diferencial al caso de funcionales es
la introducci on de la diferencial para el c alculo de los puntos crticos. En el caso del c alculo
diferencial se comienza introduciendo el concepto de derivada parcial o el algo m as general de
derivada direccional. En el caso de funcionales, comenzamos con el concepto m as d ebil, el de
variaci on, que ser a tambi en el que m as utilicemos.
Para motivar su introducci on, supongamos que tenemos dado un funcional J : V R y
consideremos la siguiente funci on real
F(t) = J(u
0
+ tv),
con u
0
, v V jos. Si J tiene un mnimo local en u
0
, es decir,
J(u) J(u
0
) para todo u B
(u
0
),
4 1. ANALOG
IAS ENTRE EL C
ALCULO DIFERENCIAL Y EL C
ALCULO VARIACIONAL
entonces F tiene tambi en un mnimo local en t = 0. Suponiendo que F sea dos veces derivable,
debe satisfacerse
(5) F
(0) = 0 y F
(0) 0.
Si J es una funci on diferenciable, entonces F
(0) corresponde a la derivada direccional de J en
u
0
en la direcci on de v. Si J es un funcional, F
(0) corresponde a la variaci on primera de J en
u
0
en la direcci on de v. Como en el caso de dimensi on nita, la anulaci on de la variaci on primera
ser a una condici on necesaria para la existencia de un extremo.
Denici on 1. La variaci on n esima de J en un punto u
0
en la direcci on v V viene dada por
n
J(u
0
; v) F
(n)
v
(0)
d
n
J(u
0
+ tv)
dt
n
t=0
,
si esta derivada existe.
Si J(u
0
; ) : V R dene un funcional lineal y continuo, entonces escribimos J(u
0
; )
u
0
J.
Tenemos, pues, que dado un funcional J : V R, si la primera variaci on existe y es un
funcional lineal y continuo en un punto de mnimo, u
0
, de J entonces las condiciones (5) se
traducen en
(6)
u
0
J = 0 y
2
u
0
J 0.
En los captulos siguientes explotaremos estas propiedades para hallar condiciones necesarias y
sucientes sobre J que impliquen la existencia de un mnimo local.
Ejemplo 2. Consideremos el funcional dado por
J(u) =
_
|u(x)|
2
dx,
denido para u U H
1
(). Tenemos que, para u, v U jados, la funci on
F
v
(t) = J(u +tv) =
_
_
|u|
2
+ 2tu v +t
2
|v|
2
_
dx
tiene derivada en t = 0, y por tanto primera variaci on, dada por
u
J(v) = 2
_
u v,
que es lineal y continua sobre H
1
(). 2
Ejercicio 1. Hallar la primera variaci on de los funcionales asociados al problema de la braquisto-
crona y al problema isoperim etrico. 2
Acontinuaci on introducimos una noci on m as general de diferencial, llamada diferencial Fr echet,
la cual generaliza la noci on de diferencial de una funci on en dimensi on nita.
2. PASO A DIMENSI
ON INFINITA 5
Denici on 2. Sea V un espacio de Banach y U V un conjunto abierto. Entonces se dice
que J : U R es diferenciable Fr echet en u
0
U si existe una aplicaci on lineal y continua
D
u
0
J : V R tal que
(7) J(u
0
+ h) J(u
0
) = D
u
0
J(h) + o(u
0
, h) para todo h V, u
0
+ h U,
donde o(u
0
, ) : V R satisface o(u
0
, 0) = 0 y
(8) lm
h0
|o(u
0
, h)|
h
= 0.
Las propiedades de la derivada Fr echet son an alogas a las de la diferencial en dimensi on nita,
y se demuestran de modo an alogo. Recogemos aqu algunas para futuras referencias.
1. La diferencial Fr echet, si existe, es unica.
2. La diferencial Fr echet satisface la regla de la cadena.
3. Si J es diferenciable Fr echet en u entonces J es continuo en u.
4. Si J es diferenciable Fr echet entonces se satisface un teorema del valor medio.
Es un ejercicio sencillo el comprobar que la existencia de la diferencial Fr echet implica la exis-
tencia de la primera variaci on. Recprocamente, si la primera variaci on dene un funcional lineal
y continuo sobre V , entonces la primera variaci on y la diferencial Fr echet coinciden.
Observaci on 1. En muchas aplicaciones la existencia de la n esima variaci on puede ser verica-
da m as f acilmente que, por ejemplo, la n esima derivada Fr echet. Por ello es una ventaja el poder
obtener condiciones sobre la n esima variaci on que implique la existencia de un extremo. Estas
condiciones las estudiaremos en los siguientes captulos. 2
El siguiente ejemplo, extrado de la teora de dimensi on nita, muestra un caso en el que la
primera variaci on no es ni lineal ni continua.
Ejemplo 3. Sea f : R
2
R denida por
f(x
1
, x
2
) =
_
x
1
si |x
2
| x
2
1
,
|x
2
|/x
1
en otro caso.
Tenemos que f vale 0 en los ejes, con lo cual f(0)h existe y es igual a cero cuando h est a en
alguno de los ejes. Sin embargo, si h = (h
1
, h
2
) no est a en ninguno de los ejes, entonces F(t) =
f(th
1
, th
2
) tiene por derivada
F
(t) = h
1
si 0 < t < |h
2
|/h
2
1
,
con lo cual, para tal h, tenemos f(0)h = h
1
. Por tanto, f(0) es discontinua en todos los pun-
tos del eje OX
1
, excepto el origen. Adem as, puesto que f no es continua en el origen, no es
diferenciable Fr echet. 2
CAP
ITULO 2
La ecuaci on de Euler y las condiciones de Legendre
1. Problemas variacionales con fronteras jas en una variable
Comenzamos con un ejemplo de problema variacional que es de gran importancia en las apli-
caciones: minimizar el funcional J : U V R, de la forma
J(u) =
_
x
1
x
0
L(x, u(x), u
(x))dx,
donde, V es el espacio de funciones derivables con continuidad C
1
([x
0
, x
1
]) y u toma valores
constantes en la frontera, de modo que denimos
U =
_
u C
1
([x
0
, x
1
]) : u(x
1
) = u
1
, u(x
2
) = u
2
_
.
Asumiendo que el funcional J posee primera variaci on y que existe un punto de mnimo, u,
sabemos por el captulo anterior que la variaci on primera debe anularse en dicho punto, es decir
u
J = 0. Veamos c omo se traduce este hecho en relaci on a la funci on L, llamada lagrangiana.
Sea v C
1
0
([x
0
, x
1
]) =
_
v C
1
([x
0
, x
1
]) : v(x
1
) = 0, v(x
2
) = 0
_
, de modo que u+tv
U para todo t R, y denamos la funci on real
F(t) = J(u + tv) =
_
x
1
x
0
L(x, u(x) +tv(x), u
(x) +tv
(x))dx,
cuya primera derivada en t = 0 es, por hip otesis,
F
(0) =
u
J(v) = 0.
Para t R cualquiera, tenemos que
F
(t) =
_
x
1
x
0
_
L
u
(x, u(x) +tv(x), u
(x) +tv
(x))v(x)
+ L
u
(x, u(x) +tv(x), u
(x) + tv
(x))v
(x)
_
dx,
de modo que, en t = 0
0 = F
(0) =
_
x
1
x
0
_
L
u
(x, u(x), u
(x))v(x) +L
u
(x, u(x), u
(x))v
(x)
_
dx.
Integrando por partes el segundo sumando de la integral y usando que v C
1
0
([x
0
, x
1
]) obtenemos
que la condici on necesaria para que u sea un mnimo es
(9)
_
x
1
x
0
_
L
u
(x, u(x), u
(x))
d
dx
L
u
(x, u(x), u
(x))
_
v(x)dx = 0,
7
8 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
para todo v C
1
0
([x
0
, x
1
]). El siguiente resultado, conocido como el Lema Fundamental del
C alculo de Variaciones, nos proporciona la primera condici on necesaria para la existencia de un
mnimo:
Lema 1. Sea g C([x
0
, x
1
]) una funci on continua tal que
_
x
1
x
0
g(x)v(x)dx = 0
para toda v C
1
0
([x
0
, x
1
]). Entonces g(x) = 0 para todo x [x
0
, x
1
].
Demostraci on. Supongamos que existe x
(x
0
, x
1
) tal que g(x
) > A > 0. Por continuidad,
tambi en existe un > 0 tal que g(x) > A/2 en (x
, x
+ ) (x
0
, x
1
). A continuaci on,
construimos una funci on regular positiva con soporte contenido en este subintervalo. Para ello,
consideramos la funci on C
denida en R
f(x) =
_
exp((1 x
2
)
1
) si 1 < x < 1,
0 en otro caso,
y, a partir de ella, construimos la funci on
v(x) =
1
f(
x x
),
con soporte en (x
, x
+ ). Tenemos entonces la siguiente contradicci on
0 =
_
x
1
x
0
g(x)v(x)dx =
_
x
+
x
g(x)v(x)dx
A
2
_
x
+
x
v(x)dx =
A
2
_
1
1
f(x)dx > 0.
Aplicando el Lema 1 a la identidad (9) deducimos la Ecuaci on de Euler, condici on necesaria
para la realizaci on de un mnimo (y, en general, de un extremo) en u:
L
u
(x, u(x), u
(x))
d
dx
L
u
(x, u(x), u
(x)) = 0 para todo x (x
1
, x
2
).
La ecuaci on de Euler juega un papel fundamental en el c alculo de variaciones y es, en general,
una ecuaci on diferencial de segundo orden. A continuaci on mostramos algunos casos especiales
en los que la ecuaci on de Euler puede reducirse a una ecuaci on de primer orden o en los que sus
soluciones pueden hallarse por medio de cuadraturas.
1. El integrando no depende de u. En este caso la ecuaci on de Euler es
d
dx
L
u
= 0,
de modo que obtenemos la ecuaci on diferencial de primer orden
L
u
(x, u(x), u
(x)) = C,
1. PROBLEMAS VARIACIONALES CON FRONTERAS FIJAS EN UNA VARIABLE 9
con C una constante. Resolviendo esta ecuaci on respecto u
obtendremos una ecuaci on
del tipo
u
(x) = F(x; C),
que se resuelve mediante el c alculo de una primitiva de F(x; ).
Ejemplo 4. El funcional
J(u) =
_
x
1
0
_
1 +u
2
(x)
dx
representa el tiempo invertido en el desplazamiento de un punto material que se mueve
a velocidad (x) > 0, a lo largo de la curva u, desde (0, 0) a (x
1
, u
1
). La ecuaci on de
Euler es
u
(x) = C(x)
_
1 + u
2
= u
(x)
2
=
C
2
(x)
2
1 C
2
(x)
2
,
de donde
u(x) =
_
x
0
C(x)
_
1 C
2
(x)
2
dx.
Observemos que si la velocidad es constante entonces la soluci on es una lnea recta. Para
(x) = bx la soluci on es una circunferencia. En efecto,
(x) = b, luego
u(x) =
1
Cb
_
x
0
C
2
(x)
(x)
_
1 C
2
(x)
2
dx =
1
Cb
_
1 (Cbx)
2
,
que es la ecuaci on de una circunferencia de radio 1/Cb. Finalmente, para (x) =
x,
retomamos el problema de la braquistocrona. 2
2. El integrando no depende de x. La ecuaci on de Euler es
0 = L
u
d
dx
L
u
= L
u
L
u
u
u
L
u
u
u
.
Multiplicando esta ecuaci on por u
obtenemos
0 = L
u
u
L
u
u
u
2
L
u
u
u
=
d
dx
(L u
L
u
),
de modo que la ecuaci on de Euler se reduce a
L u
L
u
= C,
donde C es una constante.
Ejemplo 5. Determinar la curva diferenciable, con los puntos extremos jos, que al girar
alrededor del eje de las abscisas forme una supercie de area mnima.
El area de una supercie de revoluci on viene dada por
J(u) = 2
_
x
2
x
1
u
_
1 + u
2
dx.
10 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
La ecuaci on de Euler es
u
_
1 +u
uu
2
_
1 +u
2
= C,
que, simplicando, queda
u
_
1 + u
2
= C = u
=
_
u
2
C
2
C
2
.
Separando variables, obtenemos
dx =
Cdu
u
2
C
2
= x + C
1
= C ln
u +
u
2
C
2
C
,
de donde se deduce que
(10) u(x) = C cosh
x + C
1
C
,
que es una catenaria (cosht =
1
2
(e
t
+ e
t
)). Finalmente, las constantes C y C
1
se
determinan a partir de las condiciones de contorno u(x
1
) = u
1
y u(x
2
) = u
2
. Se dan
tres casos:
a) Si se puede trazar una unica curva de la forma (10) por los puntos (x
1
, u
1
) y
(x
2
, u
2
), entonces la catenaria da la soluci on del problema.
b) Si hay dos extremales que puedan trazarse por los puntos dados, entonces uno es
soluci on y el otro no.
c) Si no hay ninguna curva de la forma (10) que pase por (x
1
, u
1
) y (x
2
, u
2
), entonces
no se alcanza un mnimo en la clase de supercies de revoluci on regulares.
2
3. El integrando no depende de u
. La ecuaci on de Euler es
L
u
(x, u(x)) = 0,
que es una ecuaci on algebraica, no diferencial.
Supongamos ahora que J posee tambi en segunda variaci on, de modo que en un mnimo local,
u, debe satisfacerse
2
u
J 0, y analicemos las repercusiones sobre el lagrangiano, L. Tenemos
F
(t) =
_
x
1
x
0
_
L
uu
(x, u(x) +tv(x), u
(x) +tv
(x))v(x)
2
+ 2L
uu
(x, u(x) +tv(x), u
(x) + tv
(x))v(x)v
(x)
+L
u
u
(x, u(x) +tv(x), u
(x) +tv
(x))v
(x)
2
_
dx,
1. PROBLEMAS VARIACIONALES CON FRONTERAS FIJAS EN UNA VARIABLE 11
de modo que la condici on F
(0) =
2
u
J(v) 0 implica
(11)
_
x
1
x
0
_
L
uu
(x, u(x), u
(x))v(x)
2
+ 2L
uu
(x, u(x), u
(x))v(x)v
(x)
+L
u
u
(x, u(x), u
(x))v
(x)
2
_
dx 0.
Lema 2. Sean F
i
: [x
0
, x
1
] R, i = 1, 2, 3 funciones continuas y supongamos que la forma
cuadr atica
Q(v) =
_
x
1
x
0
(F
1
(x)v(x)
2
+F
2
(x)v(x)v
(x)) +F
3
(x)v
(x)
2
)dx,
denida en C
1
0
([x
0
, x
1
]), es no negativa. Entonces F
3
(x) 0 para todo x (x
0
, x
1
).
Demostraci on. Supongamos que existe un x
(x
0
, x
1
) tal que F
3
(x
) < A < 0. Por con-
tinuidad, tambi en existe un > 0 tal que F
3
(x) < A/2 en (x
, x
+ ) (x
0
, x
1
).
Consideremos nuevamente la funci on f denida en la demostraci on del Lema 1 y, a partir de ella,
la funci on
v
(x) = f(
x x
),
con soporte en (x
, x
+ ). Tenemos
Q(v
) =
_
x
+
x
(F
1
(x)v
(x)
2
+ F
2
(x)v
(x)v
(x) + F
3
(x)v
(x)
2
)dx
=
_
1
1
(F
1
(x
+ y)f(y)
2
+ F
2
(x
+y)f(y)
f
(y)
+F
3
(x
+y)
f
(y)
2
2
) dy
_
1
1
F
1
(x
+y)f(y)
2
dy +
_
1
1
F
2
(x
+ y)f(y)f
(y)
A
2
_
1
1
f
(y)
2
dy,
y como
_
1
1
f
(y)
2
dy > 0,
se obtiene una contradicci on tomando sucientemente peque no.
El Lema 2 aplicado a la identidad (11) nos permite obtener la llamada Condici on de Legendre
sobre el lagrangiano:
L
u
u
(x, u(x), u
(x)) 0 para todo x (x
0
, x
1
).
Observaci on 2. Integrando por partes el segundo sumando del miembro derecho de la desigualdad
(11) obtenemos
_
x
1
x
0
_
(L
uu
d
dx
L
uu
)v
2
+L
u
u
v
2
_
dx 0.
Puesto que v(x
0
) = 0, si v
es peque na en todo el intervalo (x
0
, x
1
) entonces la funci on v ser a pe-
que na en dicho intervalo. El recproco no es cierto, ya que podemos construir funciones peque nas
pero con una derivada tan grande como queramos. Esto muestra que el t ermino dominante de esta
integral es el que involucra a L
u
u
, y de ah la condici on de Legendre. 2
12 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
Ejemplo 6. El problema de la braquistocrona. Retomemos el problema de la curva de descenso
en tiempo mnimo introducido en la Introducci on. Se trata de minimizar el funcional
J(u) =
_
x
1
0
_
1 +u
(x)
2
2gx
_
1/2
dx,
que representa el tiempo de descenso de una partcula material, con velocidad inicial cero, a lo
largo de la curva u que une los puntos (0, 0) y (x
1
, u
1
) debido unicamente a la acci on de la
gravedad. Aqu asumimos que u es diferenciable con continuidad. Las condiciones necesarias
para la existencia de un mnimo vienen dadas por la Ecuaci on de Euler
d
dx
_
u
(x)
(2gx(1 +u
(x)
2
))
1/2
_
= 0 para todo x (0, x
1
),
y la condici on de Lagrange
(1 + u
(x)
2
)
3/2
(2gx)
1/2
0 para todo x (0, x
1
).
La condici on de Lagrange se satisface trivialmente. Integrando la Ecuaci on de Euler obtenemos
(12)
u
(x)
(x(1 + u
(x)
2
))
1/2
= k para todo x (0, x
1
),
y para cierta constante k, la cual incluye el factor
2g. Particularizando en x = x
1
obtenemos
k
2
x
1
=
u
(x
1
)
2
1 + u
(x
1
)
2
< 1,
con lo que 0 < k
2
x < 1 para x (0, x
1
). De (12) obtenemos
u
(x)
2
=
k
2
x
1 k
2
x
,
y usando la parametrizaci on
x(t) =
1
2k
2
(1 cos t), y(t) = u(x(t)),
tenemos que y debe satisfacer
y
(t)
2
=
_
u
(x(t))x
(t)
_
2
=
k
2
x(t)
1 k
2
x(t)
x
(t)
2
=
1 cos t
1 + cos t
sen
2
t
4k
4
=
(1 cos t)
2
4k
4
,
de donde
y
(t) =
1
2k
2
(1 cos t).
Usando la condici on de contorno y(0) = u(x(0)) = 0 y que u 0 obtenemos
y(t) =
1
2k
2
(t sent).
Para que (x(t), y(t)) sea una soluci on de nuestro problema es necesario que satisfaga la segunda
condici on de contorno, es decir, que exista un t
1
tal que
x
1
= x(t
1
) =
1
2k
2
(1 cos t
1
), u
1
= y(t
1
) =
1
2k
2
(t
1
sent
1
).
2. GENERALIZACIONES DEL PROBLEMA CON FRONTERAS FIJAS 13
Observemos que, aunque la funci on y es invertible para todo t 0, la funci on x s olo lo es en
(0, ), de modo que debemos imponer t
1
(0, ). Fsicamente, x debe ser estrictamente creciente,
puesto que la partcula material no puede subir en contra de la gravedad. Tomando el cociente de
estas dos condiciones obtenemos
y
1
x
1
=
t
1
sent
1
1 cos t
1
.
No es difcil comprobar que la funci on f(t) = (t sint)/(1 cos t) es creciente en (0, ), y que
su valor m aximo es f() = /2. Por tanto, si u
1
/x
1
< /2 la parametrizaci on construida es una
soluci on del problema. De lo contrario, el problema no tiene soluci on. 2
2. Generalizaciones del problema con fronteras jas
2.1. El caso de varias variables. Analizaremos el caso de dos variables, por simplicidad
en la notaci on. El caso ndimensional es una extensi on directa. Consideremos un funcional de la
forma
J(u) =
_
L(x, y, u, u
x
, u
y
)dxdy
con u : R, siendo R
2
. Supondremos, de nuevo, que u es un mnimo de J, con
u C
1
() tal que u(x, y) = u
D
(x, y) en . Deniendo, para v C
1
0
(),
F(t) = J(u +tv) =
_
L(x, y, u + tv, u
x
+ tv
x
, u
y
+ tv
y
)dxdy,
obtenemos
F
(t) =
_
_
L
u
(x, y, u +tv, u
x
+tv
x
, u
y
+ tv
y
)v + L
ux
(x, y, u + tv, u
x
+ tv
x
, u
y
+ tv
y
)v
x
+L
u
y
(x, y, u + tv, u
x
+ tv
x
, u
y
+ tv
y
)v
y
_
dxdy,
de modo que en t = 0 se tiene
0 =
u
J(v) = F
(0) =
_
_
L
u
(x, y, u, u
x
, u
y
)v + L
u
x
(x, y, u, u
x
, u
y
)v
x
+ L
uy
(x, y, u
x
, u
y
)v
y
_
dxdy.
Usando el teorema de la divergencia deducimos
_
_
L
u
(x, y, u, u
x
, u
y
)
x
L
u
x
(x, y, u, u
x
, u
y
)
y
L
u
y
(x, y, u
x
, u
y
)
_
vdxdy = 0,
para toda v C
1
0
(). Finalmente, una extensi on del Lema 1 a dos dimensiones nos permite
obtener la Ecuaci on de Euler
L
u
(x, y, u, u
x
, u
y
)
x
L
ux
(x, y, u, u
x
, u
y
)
y
L
uy
(x, y, u
x
, u
y
) = 0.
Ejercicio 2. Deducir la condici on de Lagrange para el caso de dos variables. 2
14 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
Ejercicio 3. Deducir las ecuaciones de Laplace y Poisson como las ecuaciones de Euler que
minimizan los siguientes funcionales:
J(u) =
_
_
(u
x
)
2
+ (u
y
)
2
_
dxdy
J(u) =
_
_
(u
x
)
2
+ (u
y
)
2
+ 2uf(x, y)
_
dxdy
2
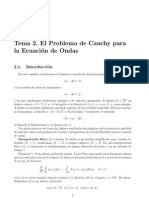
Ejemplo 7. La ecuaci on de ondas. El principio variacional fundamental de la Mec anica es el
principio de la acci on estacionaria (mnima acci on), el cual arma que entre los movimientos ad-
misibles de un sistema de puntos materiales se efect ua el movimiento que da un valor estacionario
a la integral
(13)
_
t
1
t
0
(T U)dt,
donde T es la energa cin etica y U es la energa potencial del sistema.
Apliquemos este principio para deducir las ecuaci on del movimiento de una cuerda oscilante,
la llamada ecuaci on de ondas. Situemos el origen de coordenadas en uno de los extremos de la
cuerda. La cuerda en estado de reposo se encuentra , bajo la acci on de la tensi on, en cierta lnea
recta, en la cual situamos el eje de las abscisas. La desviaci on de la situaci on de equilibrio, u(x, t),
es funci on de la abscisa, x y del tiempo, t.
La energa potencial, U, de un elemento de una cuerda exible es proporcional al alargamiento
de la misma. El segmento de cuerda dx en estado de deformaci on tendr a una longitud ds =
_
1 + (u
x
)
2
dx y, por lo tanto, el alargamiento del elemento es
_
_
1 + (u
x
)
2
1
_
dx.
Usando la f ormula de Taylor, obtenemos la aproximaci on
_
1 + (u
x
)
2
1 +
1
2
(u
x
)
2
,
de modo que podemos considerar que si u
x
es peque no, entonces la energa potencial del elemento
es, aproximadamente, igual a
1
2
k(u
x
)
2
dx, donde k es un factor de proporcionalidad, un coeciente
de deformaci on. Tenemos, pues, que la energa potencial de toda la cuerda viene dada por
1
2
_
l
0
k(u
x
)
2
dx.
Por otra parte, la energa cin etica de la cuerda es
1
2
_
l
0
(u
t
)
2
dx,
2. GENERALIZACIONES DEL PROBLEMA CON FRONTERAS FIJAS 15
donde es la densidad de la cuerda. La integral (13) tiene la forma
J(u) =
1
2
_
t
1
t
0
_
l
0
_
(u
t
)
2
k(u
x
)
2
_
.
La ecuaci on del movimiento de la cuerda viene dada por la ecuaci on de Euler para el funcional J,
que tiene la forma
t
(u
t
)
x
(ku
x
) = 0,
que es la ecuaci on de ondas. 2
Ejemplo 8. Problema de Plateau. Se trata de hallar la supercie de menor area con un con-
torno dado. Si el contorno viene dado por u(x, y) = 0, podemos introducir la parametrizaci on
(x, y, u(x, y)) de la supercie buscada, que debe minimizar el funcional
J(u) =
_
_
1 + u
2
x
+u
2
y
dxdy.
La ecuaci on de Euler tiene la forma
(14) r(1 + q
2
) 2spq + t(1 +p
2
) = 0,
donde
p = u
x
, q = u
y
, r = u
xx
, s = u
xy
, t = u
yy
.
La ecuaci on (14) tiene un signicado geom etrico importante, que explicaremos a partir de la
f ormula para la curvatura media de la supercie
M =
1
2
_
1
1
+
1
2
_
=
Eg 2Ff + Ge
2(EGF
2
)
,
donde E, F y G son los coecientes de la primera forma fundamental y e, f y g los de la segunda.
Para la parametrizaci on considerada, la f ormula de la curvatura media queda como
M =
r(1 + q
2
) 2spq +t(1 + p
2
)
_
1 +p
2
+q
2
.
Es decir, la curvatura media de cualquier supercie extremal es nula. Las supercies con esta
propiedad son llamadas supercies minimales. 2
2.2. El caso de varias inc ognitas. Por simplicidad, nos restringimos al caso de dos inc ogni-
tas. Consideremos la minimizaci on del funcional
J(u, v) =
_
x
1
x
0
L(x, u, v, u
, v
)dx,
con u(x
0
) = u
0
, u(x
1
) = u
1
, v(x
0
) = v
0
, v(x
1
) = v
1
. Si denimos
F(t, ) = J(u + t, v +),
16 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
y asumimos que J tiene un extremo local en (u, v), entonces tambi en lo tendr a F en (0, 0), de
modo que debe satisfacerse F(0, 0) = (0, 0). Asumiendo la regularidad necesaria sobre L,
tenemos que una condici on necesaria ser a
0 = F
t
(0, 0) =
_
x
1
x
0
_
L
u
(x, u, v, u
, v
) + L
u
(x, u, v, u
, v
_
dx,
0 = F
(0, 0) =
_
x
1
x
0
_
L
v
(x, u, v, u
, v
) + L
v
(x, u, v, u
, v
_
dx,
que son ecuaciones an alogas a la del caso unidimensional. De modo similar a este caso se deducen
las ecuaciones de Euler
L
u
(x, u, v, u
, v
)
d
dx
L
u
(x, u, v, u
, v
) = 0,
L
v
(x, u, v, u
, v
)
d
dx
L
v
(x, u, v, u
, v
) = 0.
Ejemplo 9. Geod esicas de supercies de revoluci on
Consideremos una supercie regular de revoluci on, S, dada por la parametrizaci on
x(u, v) = (f(v) cos u, f(v) senu, g(v)).
Cualquier curva regular en S puede describirse mediante una parametrizaci on del tipo (u, v)
(u(t), v(t)) con t (0, T). Como sabemos, la curva m as corta que conecta dos puntos (u(0), v(0)) =
(u
0
, v
0
) y (u(T), v(T)) = (u
T
, v
T
) se llama una geod esica.
La longitud de arco entre estos dos puntos viene dada por
J(u, v) =
_
T
0
L(t, u, v, u
, v
)dt =
_
T
0
I(t, u, v, u
, v
)
1/2
dt,
donde I es la primera forma fundamental, que en el caso de supercies de revoluci on tiene la
forma
I(u, v, u
, v
) = f(v)
2
u
2
+ (f
(v)
2
+g
(v)
2
)v
2
.
Las ecuaciones de Euler viene dadas por
d
dt
f(v)
2
u
I(u, v)
1/2
= 0,
f
(v)
2
u
2
+ (f
(v)f
(v) + g
(v)
(v))v
2
I(u, v)
1/2
d
dt
(f
(v)
2
+ g
(v))v
I(u, v)
1/2
= 0.
En el sencillo caso del cilindro, podemos tomar f(v) = 1 y g(v) = v. Las ecuaciones de Euler
son
d
dt
u
I(u, v)
1/2
= 0,
d
dt
v
I(u, v)
1/2
= 0,
es decir
u
= C
1
_
u
2
+ v
2
v
= C
2
_
u
2
+ v
2
,
2. GENERALIZACIONES DEL PROBLEMA CON FRONTERAS FIJAS 17
de donde deducimos que u
= cv
, o bien, u(t) = cv(t) + c, es decir, una familia biparam etrica de
curvas helicoidales sobre el cilindro. 2
2.3. Funcionales que dependen de las derivadas de orden superior. Consideremos el
funcional
J(u) =
_
x
1
x
0
L(x, u, u
, u
)dx,
y supongamos que u C
2
([x
0
, x
1
]) es un extremo local sujeto a las condiciones
u(x
0
) = u
0
, u(x
1
) = u
1
, u
(x
0
) = u
0
, u(x
1
) = u
1
No es difcil ver que la ecuaci on de Euler viene dada por
L
u
d
dx
L
u
+
d
2
dx
2
L
u
= 0
2.4. Problemas variacionales con restricciones. En las secciones anteriores hemos estu-
diado las condiciones necesarias para la existencia de un extremo de funcionales denidos en
clases de funciones que toman valores constantes en la frontera. Como vimos en la Introduc-
ci on, existen aplicaciones en las que es natural considerar ciertas restricciones adicionales sobre
el conjunto de funciones admisibles. Entre la m as importantes se hallan las restricciones de tipo
isoperim etrico y las restricciones de igualdad, que estudiamos a continuaci on.
2.4.1. Restricciones de igualdad. En este problema, se trata de hallar u = (u
1
, . . . , u
n
) para
la cual el funcional
J(u) =
_
x
1
x
0
L(x, u, u
)dx
tiene un extremo, con las funciones admisibles satisfaciendo las condiciones usuales de frontera,
y tales que
i
(x, u, u
) = 0, i = 1, . . . , m, m < n,
donde
i
son ciertas funciones regulares dadas. Aqu asumimos que las restricciones son indepen-
dientes, es decir, que
(
1
, . . . ,
m
)
(u
1
, . . . , u
m
)
= 0.
Teorema 1. Si u realiza un extremo del funcional J y satisface las restricciones
i
(x, u, u
) = 0, i = 1, . . . , m, m < n,
entonces tambi en satisface las ecuaciones de Euler para el funcional
J
(u) =
_
x
1
x
0
L
(x, u, u
)dx,
donde
L
(x, u, u
) = L(x, u, u
) +
m
i=1
i
(x)
i
(x, u, u
).
18 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
Las funciones (
1
, . . . ,
m
) y u = (u
1
, . . . , u
n
) se determinan a partir de las ecuaciones de Euler
L
u
j
d
dx
L
u
j
= 0, j = 1, . . . , n,
y de las restricciones
i
= 0, i = 1, . . . , m.
Demostraci on. Lo demostraremos para el caso particular en el que los enlaces no dependen de
u
. Sea u un extremo restringido de J. La condici on fundamental de extremo,
u
J = 0, tiene la
forma habitual
_
x
1
x
0
_
n
j=1
L
u
j
v
j
+ L
u
j
v
j
_
dx = 0.
Sin embargo, no es posible aplicar el lema fundamental para deducir las ecuaciones de Euler ya
que las funciones u
j
est an sometidas a los m enlaces
i
= 0 y, por tanto, las variaciones v
j
no son
arbitrarias. En efecto, asumamos que para t (0, ) las variaciones satisfacen las restricciones
1
,
es decir,
i
(x, u
1
+ tv
1
, . . . , u
n
+ tv
n
) = 0.
Entonces
i
(x, u
1
+ tv
1
, . . . , u
n
+ tv
n
)
i
(x, u
1
, . . . , u
n
) = 0, t (0, )
de donde
n
j=1
i
u
j
(u)v
j
= 0, i =, 1 . . . , m,
y, por tanto, solo puede haber n m variaciones arbitrarias. Inspirados en el caso de dimensi on
nita, multiplicamos estas ecuaciones por funciones
i
, a determinar. Integrando en (x
0
, x
1
) ob-
tenemos
_
x
1
x
0
i
n
j=1
i
u
j
v
j
dx = 0,
de modo que tambi en se satisface
(15)
_
x
1
x
0
n
j=1
_
L
u
j
d
dx
L
u
j
+
m
i=1
i
u
j
_
v
j
dx = 0.
Todava no podemos aplicar el lema fundamental, puesto que las variaciones siguen siendo de-
pendientes. Consideremos las m funciones
1
, . . . ,
m
determinadas como la soluci on unica del
sistema de ecuaciones algebraicas lineales
L
u
j
d
dx
L
u
j
+
m
i=1
i
u
j
= 0, j = 1, . . . , m,
1
Es posible, gracias al teorema de la funci on implcita
2. GENERALIZACIONES DEL PROBLEMA CON FRONTERAS FIJAS 19
que existe debido a que las restricciones son independientes, es decir,
(
1
, . . . ,
m
)
(u
1
, . . . , u
m
)
= 0.
Con
1
, . . . ,
m
elegidas de este modo, la integral (15) queda como
_
x
1
x
0
n
j=m+1
_
L
u
j
d
dx
L
u
j
+
m
i=1
i
u
j
_
v
j
dx = 0,
donde solo consideramos nm variaciones, que ya s pueden tomarse arbitrariamente. Anulando
sucesivamente todas las v
j
excepto una y aplicando el lema fundamental, se deduce el resultado.
Ejemplo 10. Geod esicas. Sea (x, y, z) = 0 la ecuaci on de una supercie, S, dada y supongamos
que toda curva diferenciable denida sobre S admite una parametrizaci on del tipo
: [t
0
, t
1
] S, (t) = (x(t), y(t), z(t)).
Entonces, la longitud de arco viene dada por
J(x, y, z) =
_
t
1
t
0
_
x
(t)
2
+ y
(t)
2
+z
(t)
2
_
1/2
dt.
Las condiciones de extremo son
d
dt
_
x
_
x
2
+y
2
+ z
2
_
1/2
_
+
x
= 0,
con ecuaciones an alogas para y y z. Introduciendo el cambio de variable a longitud de arco, s,
determinado por
ds
dt
=
_
x
2
+ y
2
+z
2
_
1/2
tenemos que
d
dt
=
ds
dt
d
ds
y
d
dt
_
x
_
x
2
+ y
2
+z
2
_
1/2
_
=
ds
dt
d
2
x
ds
2
.
De este modo obtenemos la relaci on
d
2
x/ds
2
x
=
d
2
y/ds
2
y
=
d
2
z/ds
2
z
=
ds/dt
,
la cual expresa que la normal a la curva coincide con la normal a la supercie, que es la denici on
usual de geod esica en geometra diferencial. 2
20 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
2.4.2. El problema isoperim etrico. En este problema, se trata de hallar la funci on u para la
cual el funcional
J(u) =
_
x
1
x
0
L(x, u, u
)dx
tiene un extremo, con las funciones admisibles satisfaciendo las condiciones de frontera u(x
0
) =
u
0
y u(x
1
) = u
1
, y tales que, para cierta G = (G
1
, . . . , G
m
) se tiene
_
x
1
x
0
G
i
(x, u, u
)dx =
i
para ciertas constantes jadas,
i
, i = 1, . . . , m.
Los problemas isoperim etricos pueden reducirse a problemas con restricciones de igualdad
como los vistos en la secci on anterior. Para ello, introducimos las funciones
z
i
(x) =
_
x
x
0
G
i
(x, u, u
)dx,
para i = 1, . . . , m, las cuales satisfacen z
i
(x
0
) = 0 y z
i
(x
1
) =
i
. Adem as, z
i
(x) = G
i
(x, u, u
).
De este modo, los enlaces isoperim etricos
_
x
1
x
0
G
i
(x, u, u
)dx =
i
se transforman en los enlaces diferenciales
z
i
(x) = G
i
(x, u, u
).
A continuaci on, denimos el funcional
J(u, z) =
_
x
1
x
0
L(x, u, u
)dx,
con z = (z
1
, . . . , z
m
). El extremo debe satisfacer las condiciones de frontera
(u(x
0
), z(x
0
)) = (u
0
, 0), (u(x
1
), z(x
1
)) = (u
1
, ),
siendo = (
1
, . . . ,
m
), y las restricciones de igualdad
G
i
(x, u, u
) z
i
= 0 para i = 1, . . . , m.
Aplicando lo visto en la secci on anterior, consideramos el funcional
J
(u, z) =
_
x
1
x
0
_
L(x, u, u
) +
m
i=1
i
(x)(G
i
(x, u, u
) z
i
)
_
dx,
cuyas ecuaciones de Euler vienen dadas por
L
u
j
+
m
i=1
_
i
(x)
G
i
u
j
_
d
dx
_
L
u
j
+
m
i=1
i
(x)
G
i
u
j
_
= 0,
cuando derivamos respecto las inc ognitas u
j
, j = 1, . . . , n y por
d
dx
i
(x) = 0,
2. GENERALIZACIONES DEL PROBLEMA CON FRONTERAS FIJAS 21
cuando derivamos respecto las inc ognitas z
i
, i = 1, . . . , m. Obviamente, de aqu deducimos que
i
son constantes. Adem as, las primeras n ecuaciones son las mismas que las ecuaciones de Euler
asociadas al funcional
J
(u) =
_
x
1
x
0
_
L(x, u, u
) +
m
i=1
i
G
i
(x, u, u
)
_
dx.
De este modo hemos llegado a la siguiente regla: para obtener la condici on necesaria fundamental
en el problema isoperim etrico sobre la determinaci on de un extremo del funcional
J(u) =
_
x
1
x
0
L(x, u, u
)dx,
con u(x
0
) = u
0
y u(x
1
) = u
1
, y sujeto a las condiciones isoperim etricas
_
x
1
x
0
G
i
(x, u, u
)dx =
i
hay que considerar el funcional auxiliar
J
(u) =
_
x
1
x
0
_
L(x, u, u
) +
m
i=1
i
G
i
(x, u, u
)
_
dx,
donde
i
son constantes a determinar, y escribir sus ecuaciones de Euler. Las constantes
i
se
determinan a partir de las condiciones isoperim etricas.
Ejemplo 11. Hallar la curva u de longitud dada para la cual el area del trapecio curvilneo de la
gura es m axima. El funcional a estudiar es
J(u) =
_
x
1
x
0
u(x)dx,
con u(x
0
) = u
0
y u(x
1
) = u
1
, y sujeto a la condici on isoperim etrica
J(u) =
_
x
1
x
0
_
1 + u
(x)
2
dx = .
22 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
Las ecuaci on de Euler del funcional asociado
J
(u) =
_
x
1
x
0
_
u(x) +
_
1 +u
(x)
2
_
dx
viene dada por
u +
_
1 + u
2
_
1 +u
2
= C
1
,
donde hemos usado que el integrando no depende de x. Se sigue que
u C
1
=
_
1 + u
2
.
Introduciendo un par ametro t tal que u
= tant, de la ecuaci on anterior obtenemos
u = C
1
cos t.
Adem as, de
du
dx
= tant se sigue que
dx =
du
tant
=
sentdt
tant
= cos tdt,
de modo que x = sent +C
2
. Despejando t de las expresiones para u y x obtenemos
(x C
2
)
2
+ (u C
1
)
2
=
2
.
Finalmente, las constantes C
1
, C
2
y se determinan a partir de las condiciones de frontera y de la
condici on isoperim etrica. 2
Ejemplo 12. Problema de autovalores. Hallar el mnimo del funcional
J(u) =
_
0
u
(x)
2
dx,
con u(0) = u() = 0 y sujeto a
_
0
u(x)
2
dx = 1.
El funcional asociado es
J(u) =
_
0
(u
(x)
2
+ u(x)
2
)dx,
cuya ecuaci on de Euler viene dada por
u
= u,
es decir, es un problema de autovalores. Las races del polinomio caracterstico son
. Si 0
entonces la soluci on general viene dada por
u(x) = C
1
exp(
x) +C
2
exp(
x)
que no puede satisfacer las condiciones de frontera, de modo que no hay soluci on para 0. En
el caso contrario, < 0, se tiene que la soluci on general es
u(x) = C
1
sen(
x) +C
2
cos(
x).
3. VARIACI
ON GENERAL DE UN FUNCIONAL 23
Las condiciones de frontera implican que u(x) = C
1
sinkx, con k =
. La condici on isope-
rim etrica implica
1 =
_
0
u(x)
2
dx = C
2
1
_
0
sin
2
kxdx = C
2
1
_
k
0
sin
2
s
ds
k
=
C
2
1
2
,
de donde C
1
=
_
2/, y la soluci on queda como
u(x) =
2
senkx,
es decir, hay una familia uniparam etrica de extremales que, de hecho, tambi en satisfacen la condi-
ci on de Legendre. 2
3. Variaci on general de un funcional
3.1. Deducci on de la f ormula b asica. En esta secci on deduciremos la f ormula general para
la variaci on de un funcional de la forma
J(u) =
_
x
1
x
0
L(x, u, u
)dx.
Asumiremos que las curvas admisibles son regulares, digamos C
1
, pero a diferencia de las hip ote-
sis de las secciones previas, asumiremos que u(x
0
) y u(x
1
) pueden variar arbitrariamente. Este
hecho nos motiva a introducir la siguiente noci on de distancia: denimos
d(u, u
) = max |u u
| + max |u
| +|P
0
P
0
| +|P
1
P
1
|,
donde P
0
, P
0
R
2
denotan los puntos correspondientes al extremo izquierdo del intervalo de
denici on de u y u
, respectivamente, y P
1
, P
1
al extremo derecho de dicho intervalo. En general,
las funciones u y u
est an denidas en intervalos diferentes I e I
. As, para que nuestra noci on
de distancia tenga sentido debemos extender u y u
(de un modo diferenciable) a un intervalo que
contenga a I e I
.
Supongamos ahora que u y u
son cercanas en el sentido de la distancia denida y consi-
deremos su diferencia v = u
u. Sean P
0
= (x
0
, u
0
) y P
1
= (x
1
, u
1
), donde u(x
0
) = u
0
,
u(x
1
) = u
1
, y
P
0
= (x
0
+ x
0
, u
0
+u
0
), P
1
= (x
1
+x
1
, u
1
+ u
1
),
donde u
(x
0
+ x
0
) = u
0
+ u
0
y u
(x
1
+ x
1
) = u
1
+ u
1
. La correspondiente variaci on, J,
del funcional J, viene dada como una expresi on lineal en t erminos de v, v
, x
0
, x
1
, u
0
, u
1
, y
que diere del incremento
J = J(u +v) J(u)
24 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
FIGURA 1
en una cantidad de orden menor que uno relativa a la distancia d(u, u + v). Como
J =
_
x
1
+x
1
x
0
+x
0
L(x, u + v, u
+ v
)dx
_
x
1
x
0
L(x, u, u
)dx
=
_
x
1
x
0
_
L(x, u +v, u
+ v
) L(x, u, u
)
_
dx
+
_
x
1
+x
1
x
1
L(x, u + v, u
+ v
)dx
_
x
0
+x
0
x
0
L(x, u +v, u
+v
)dx,
se sigue de la f ormula de Taylor que
J
_
x
1
x
0
_
L
u
(x, u, u
)v L
u
(x, u, u
)v
_
dx + L(x, u, u
x=x
1
x
1
L(x, u, u
x=x
0
x
0
=
_
x
1
x
0
_
L
u
d
dx
L
u
_
vdx+L(x, u, u
x=x
1
x
1
+L
u
v
x=x
1
L(x, u, u
)|
x=x
0
x
0
L
u
v
x=x
0
,
donde denota igualdad excepto por t erminos de orden mayor que uno con respecto a d(u, u+v).
Sin embargo, queda claro en la Figura 1 que
v(x
0
) u
0
u
(x
0
)x
0
, v(x
0
) u
1
u
(x
1
)x
1
,
y, por tanto
u
J(v) =
_
x
1
x
0
_
L
u
d
dx
L
u
_
vdx +L
u
x=x
1
u
1
+ (L L
u
u
x=x
1
x
1
L
u
x=x
0
u
0
+ (L L
u
u
x=x
0
x
0
,
o, de un modo m as conciso
(16)
u
J(v) =
_
x
1
x
0
_
L
u
d
dx
L
u
_
vdx + L
u
y
x=x
1
x=x
0
+ (L L
u
u
x=x
1
x=x
0
,
3. VARIACI
ON GENERAL DE UN FUNCIONAL 25
donde hemos denido
x|
x=x
i
= x
i
, x|
u=u
i
= u
i
.
Esta es la f ormula b asica para la variaci on general del funcional J.
Observaci on 3. La f ormula de la variaci on general para el caso ndimensional se deduce de un
modo an alogo, siendo esta
u
J(v) =
_
x
1
x
0
n
i=1
_
L
u
i
d
dx
L
u
i
_
v
i
dx +
n
i=1
L
u
i
u
i
x=x
1
x=x
0
+
_
L
n
i=1
u
i
L
u
i
_
x
x=x
1
x=x
0
.
2
Ejemplo 13. Estudiamos a continuaci on el caso en que las condiciones que se imponen en la
frontera del intervalo son que las coordenadas est en contenidas en dos curvas dadas. Es decir, se
trata de hallar, de entre todas las curvas regulares cuyos puntos frontera est an contenidos en dos
curvas, y , aquellas que realizan un extremo del funcional
J(u) =
_
x
1
x
0
L(x, u, u
)dx.
La variaci on general de J viene dada por la f ormula (16). Claramente, cualquier extremal de J
debe satisfacer la ecuaci on de Euler, con lo que (16) puede escribirse como
u
J(v) = L
u
x=x
1
u
1
+ (L L
u
u
x=x
1
x
1
L
u
x=x
0
u
0
+ (L L
u
u
x=x
0
x
0
,
que debe anularse en todo extremo de J. De acuerdo a la Figura 2,
u
0
= (
(x) +
0
)x
0
, u
1
= (
(x) +
1
)x
1
,
con
i
0 cuando x
i
0. Luego, en un extremo debe satisfacerse
0 =
u
J(v) = (L
u
+ L u
L
u
)
x=x
1
x
1
(L
u
+L u
L
u
)
x=x
0
x
0
.
Como los incrementos x
0
y x
1
son independientes, la anterior f ormula implica
(L + (
)L
u
)
x=x
0
= 0,
(L + (
)L
u
)
x=x
1
= 0,
que son las llamadas condiciones de transversalidad, y que son condici on necesaria de extremo
para J.
En la resoluci on de problemas de optimizaci on, a menudo encontramos funcionales del tipo
_
x
1
x
0
f(x, u)
_
1 + u
2
dx,
para los cuales las condiciones de transversalidad tienen una forma particularmente simple. En
este caso tenemos
L
u
= f(x, u)
u
_
1 + u
2
=
u
L
1 + u
2
,
26 2. LA ECUACI
ON DE EULER Y LAS CONDICIONES DE LEGENDRE
FIGURA 2
de modo que las condiciones de transversalidad son
L + (
)L
u
=
(1 + u
)L
1 +u
2
,
L + (
)L
u
=
(1 +u
)L
1 +u
2
.
Se sigue que
u
= 1/
y u
= 1/
en los extremos izquierdo y derecho del intervalo, respectivamente. Es decir, en este tipo de fun-
cionales, las condiciones de transversalidad se reducen a condiciones de ortogonalidad. 2
CAP
ITULO 3
Las condiciones de Jacobi
1. Introducci on
En el captulo anterior vimos que una condici on necesaria para la realizaci on de un mnimo
de un funcional del tipo variacional
J(u) =
_
x
1
x
0
L(x, u(x), u
(x))dx
con condici on de frontera ja, u(x
0
) = u
0
y u(x
1
) = u
1
, es la condici on de Legendre
L
u
u
(x, u(x), u
(x)) 0 para todo x (x
0
, x
1
).
Legendre, en analoga al caso de dimensi on nita, intent o demostrar, sin exito, que una condici on
suciente para que J tenga un mnimo en u es que se satisfaga la desigualdad estricta
(17) L
u
u
(x, u(x), u
(x)) > 0 para todo x (x
0
, x
1
).
En la Observaci on 2 hallamos la siguiente expresi on para la segunda variaci on
2
u
J(v) =
1
2
_
x
1
x
0
_
(L
uu
d
dx
L
uu
)v
2
+L
u
u
v
2
_
dx,
con v C
1
0
([x
0
, x
1
]). Por brevedad, la escribiremos como
2
u
J(v) =
1
2
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx.
La idea de Legendre fue escribir esta expresi on en la forma
(18)
2
u
J(v) =
1
2
_
x
1
x
0
_
Pv
2
+ 2wvv
+ (Q+w
)v
2
_
dx,
siendo w una funci on derivable arbitraria, y donde hemos usado la relaci on
0 =
_
x
1
x
0
d
dx
(wv
2
) =
_
x
1
x
0
(w
v
2
+ 2wvv
)dx,
puesto que v(x
0
) = v(x
1
) = 0. Seguidamente, observ o que la condici on L
u
u
> 0 sera suciente
si se pudiera encontrar una funci on w para la que el integrando de (18) fuera un cuadrado perfecto.
Sin embargo, esto no es siempre posible, como el mismo Legendre demostr o, puesto que w debera
satisfacer la ecuaci on
P(Q+w
) = w
2
,
27
28 3. LAS CONDICIONES DE JACOBI
que no posee, necesariamente, una soluci on global en todo el intervalo (x
0
, x
1
).
1
Legendre con-
cluy o que condiciones de tipo local como la ecuaci on de Euler o la condici on estricta de Legendre,
dada por (17), no podan ser las unicas condiciones sucientes para la realizaci on de un mnimo.
2. Condici on necesaria de Jacobi
En esta secci on estudiaremos las condiciones bajo las cuales el funcional
(19) G(v) =
_
x
1
x
0
_
Pv
2
+Qv
2
_
dx,
denido para v C
1
0
([x
0
, x
1
]), es denido positivo. Aunque en la secci on anterior obtuvimos este
funcional en relaci on con la funci on lagrangiana del problema de optimizaci on, en concreto
P =
1
2
L
u
u
, Q =
1
2
_
L
uu
d
dx
L
u
_
,
de momento estudiaremos la positividad del funcional (19) como un problema independiente.
Ya vimos que una condici on necesaria para la no negatividad del funcional (19) es que
P(x) 0 para todo x (x
0
, x
1
).
En esta secci on asumiremos la condici on
P(x) > 0 para todo x (x
0
, x
1
),
y buscaremos condiciones necesarias y sucientes para que dicho funcional sea denido positivo.
Comenzamos escribiendo la ecuaci on de Euler asociada al funcional (19):
(20)
d
dx
(Pv
) +Qv = 0.
Esta es una ecuaci on diferencial lineal de segundo orden. Las condiciones de frontera son v(x
0
) =
v(x
1
) = 0. Este problema tiene la soluci on trivial v 0. Sin embargo, tambi en puede tener
soluciones no triviales
2
. En este contexto, introducimos la siguiente denici on
Denici on 3. Diremos que el punto x es un punto conjugado de x
0
si la ecuaci on (20) tiene una
soluci on que se anula en x
0
y x pero que no es id enticamente nula.
Observaci on 4. Si v es una soluci on no id enticamente nula de (20) entonces tambi en lo ser a Cv,
para cualquier C = 0. Hay varios criterios de normalizaci on que se pueden imponer para forzar la
unicidad de soluci on de este problema. Aqu asumiremos que v
(x
0
) = 1, que es siempre posible
eligiendo C adecuadamente. En efecto, si v(x
0
) = 0 y v no es id enticamente nula entonces v
(x
0
)
no puede ser nulo, por el teorema de unicidad para la ecuaci on lineal (20). 2
1
Por ejemplo, si P = 1 y Q = 1, la soluci on viene dada por w(x) = tan(c x). Si x
1
x
0
> , no hay
soluci on en todo el intervalo (x0, x1), puesto que tan(c x) se hace innita en alg un punto de dicho intervalo.
2
Por ejemplo, para P = Q = 1, la funci on v(x) = C sen x es soluci on del problema en el intervalo (0, ), para
toda constante C.
2. CONDICI
ON NECESARIA DE JACOBI 29
Teorema 2. Supongamos que P(x) > 0 en [x
0
, x
1
] y que no hay puntos conjugados en dicho
intervalo. Entonces el funcional cuadr atico
G(v) =
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx
es denido positivo para toda v C
1
0
([x
0
, x
1
]).
Demostraci on. Para demostrar que el funcional G es denido positivo lo reduciremos a la forma
_
x
1
x
0
P
2
dx,
donde
2
es cierta expresi on cuya anulaci on implica que v 0. Para conseguir esto, comenzamos
sumando a G la funci on cero expresada en la forma
_
x
1
x
0
d
dx
(wv
2
)dx.
A continuaci on, seleccionamos la funci on diferenciable w de modo que la expresi on
(21) Pv
2
+ Qv
2
+
d
dx
(wv
2
) = Pv
2
+ 2wvv
+ (Q+w
)v
2
sea un cuadrado perfecto. Esto ser a cierto si w es soluci on de
(22) P(Q+w
) = w
2
,
ya que en tal caso (21) puede escribirse como
P
_
v
+
w
P
v
_
2
.
De este modo, si (22) tiene una soluci on denida en todo el intervalo [x
0
, x
1
], entonces G puede
escribirse como
(23) G(v) =
_
x
1
x
0
P
_
v
+
w
P
v
_
2
dx,
y es, por tanto, denido positivo. De hecho, si (23) se anula, entonces debe ser
v
+
w
P
v 0,
puesto que, por hip otesis, es P > 0 en [x
0
, x
1
]. Pero esta ecuaci on de primer orden, con la condi-
ci on v(x
0
) = 0 tiene por unica soluci on a v 0.
La demostraci on se reduce, pues, a comprobar que si no hay puntos conjugados de x
0
en el
intervalo [x
0
, x
1
] entonces la ecuaci on (22) tiene una soluci on global en [x
0
, x
1
]. Esta ecuaci on
diferencial es una ecuaci on de Ricatti, , que puede ser reducida a una ecuaci on lineal de segundo
orden mediante el cambio
(24) w =
z
z
P,
30 3. LAS CONDICIONES DE JACOBI
donde z es una nueva inc ognita. Con este cambio (22) se transforma en
(25)
d
dx
(Pz
) +Qz = 0,
que es, justamente, la ecuaci on de Euler de G. Ahora, puesto que no hay puntos conjugados en
[x
0
, x
1
] se sigue, por denici on, que (25) tiene una soluci on que no se anula en [x
0
, x
1
]. Por tanto,
la ecuaci on (22) tiene una soluci on, dada por (24), denida en todo el intervalo [x
0
, x
1
].
A continuaci on veremos que la condici on de que no existan puntos conjugados de x
0
en el
intervalo [x
0
, x
1
] no es solo una condici on suciente sino tambi en necesaria. Comenzamos con un
lema que usaremos en la demostraci on.
Lema 3. Si la funci on v satisface la ecuaci on
d
dx
(Pv
) +Qv = 0
y las condiciones de frontera
v(x
0
) = v(x
1
) = 0,
entonces
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx = 0.
Demostraci on. El lema es una consecuencia inmediata de la f ormula
0 =
_
x
1
x
0
_
d
dx
(Pv
) +Qv
_
vdx =
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx,
que se obtiene por integraci on por partes y el uso de las condiciones de frontera.
Teorema 3. Supongamos que P(x) > 0 para todo x [x
0
, x
1
]. Si el funcional cuadr atico G
es denido positivo para toda v C
1
0
([x
0
, x
1
]) entonces el intervalo [x
0
, x
1
] no posee puntos
conjugados de x
0
.
Demostraci on. La idea de la demostraci on es la de construir una familia de funcionales denidos
positivos dependientes de un par ametro, t, tales que para t = 1 se reduce al funcional G, mientras
que para t = 0 nos da el funcional cuadr atico
_
x
1
x
0
v
2
dx,
el cual, claramente, no posee puntos conjugados de x
0
en [x
0
, x
1
]. Entonces, demostraremos que
cuando variamos el par ametro t en [0, 1], no pueden aparecer puntos conjugados en [x
0
, x
1
].
Consideremos, pues, el funcional
(26)
_
x
1
x
0
_
t
_
Pv
2
+ Qv
2
_
+ (1 t)v
2
_
dx,
2. CONDICI
ON NECESARIA DE JACOBI 31
que es denido positivo para todo t [0, 1], puesto que G lo es por hip otesis. La ecuaci on de
Euler correspondiente a este funcional es
(27)
d
dx
_
(tP + (1 t))v
+ tQv = 0.
Sea v(x, t) una soluci on de (27) tal que v(x
0
, t) = 0 y v
x
(x
0
, t) = 1 para todo t [0, 1]. Esta
soluci on depende con continuidad del par ametro t, que para t = 1 se reduce a la soluci on v de la
ecuaci on (20) con las condiciones v(x
0
, 1) = v(x
1
, 1) = 0, y para t = 0 se reduce a la soluci on
de v
= 0 con las mismas condiciones de frontera, es decir, v(x, 0) = x x
0
.
Supongamos ahora que el intervalo [x
0
, x
1
] contiene un punto x conjugado de x
0
. Necesaria-
mente ser a x < x
1
porque, si x = x
1
, el Lema 3 implica que existe una v no id enticamente nula
tal que G(v) = 0, contradiciendo la hip otesis de positividad de G. Por tanto, la demostraci on se
reduce a comprobar que no puede haber un punto conjugado, x, en el interior de [x
0
, x
1
].
Para demostrarlo, consideremos el conjunto de los puntos
C = {(x, t) [x
0
, x
1
] [0, 1] : v(x, t) = 0} .
Si mostramos que en los puntos en los que v(x, t) = 0 no puede tenerse v
x
(x, t) = 0 entonces
podremos deducir del teorema de la funci on implcita que el conjunto C representa una curva
diferenciable en el plano xt. Tenemos que, si v(x
, t
) = 0 en alg un (x
, t
) entonces debe ser
v
x
(x
, t
) = 0 ya que para cualquier t jo v(x, t) satisface la ecuaci on (27), y si se tuviera
v(x
, t
) = v
x
(x
, t
) = 0 entonces debera ser v(x, t
) = 0 para todo x [x
0
, x
1
] debido al
teorema de unicidad para ecuaciones diferenciales lineales. Pero esto es imposible puesto que v
x
es una funci on continua en [x
0
, x
1
] [0, 1] y v
x
(x
0
, t) = 1 para todo t [0, 1].
Tenemos entonces que el teorema de la funci on implcita nos asegura la existencia de una
curva, x(t), tal que v(x(t), t) = 0 en un entorno de cada punto de C. Por hip otesis, el punto ( x, 1)
pertenece a dicha curva. Partiendo de este punto tenemos que (v ease Figura 1):
FIGURA 1
A. La curva no puede terminar en el interior de [x
0
, x
1
][0, 1], pues sera una contradicci on
de la dependencia continua de v(x, t) respecto del par ametro t.
32 3. LAS CONDICIONES DE JACOBI
B. La curva no puede cortar el segmento {x = x
1
, t [0, 1]}, puesto que, por el mismo ar-
gumento que el del Lema 3, pero aplicado a la ecuaci on (27), las condiciones de frontera
v(x
0
, t) = v(x
1
, t) = 0 y el funcional (26), se tendra una contradicci on de la positividad
del funcional para todo t.
C. La curva no puede cortar el segmento t = 1, x [x
0
, x
1
], puesto que tendramos
v(x, t) = v
x
(x, t) = 0 para alg un (x, t).
D. La curva no puede cortar el segmento {t = 0, x [x
0
, x
1
]}, puesto que para t = 0 la
ecuaci on (27) se reduce a v
= 0, cuya soluci on solo se anula en x = x
0
.
E. La curva no puede aproximarse al segmento {x = x
0
, t [0, 1]} puesto que tendramos
v
x
(x
0
, t) = 0 para alg un t, contrario a nuestras hip otesis.
Se sigue que tal curva no puede existir, con lo que se concluye la demostraci on.
Si reemplazamos la condici on de que el funcional G sea denido positivo por la de que sea no
negativo obtenemos el siguiente resultado.
Corolario 4. Si G(v), con P(x) > 0 para todo x [x
0
, x
1
], es denido no negativo entonces el
intervalo [x
0
, x
1
) no contiene puntos conjugados de x
0
.
Demostraci on. La unica diferencia con la demostraci on del teorema anterior es que no podemos
asegurar que el funcional auxiliar dado por (26) sea denido positivo en t = 1. As, no se puede
excluir la posibilidad de que x = x
1
.
Los Teoremas 2 y 3 se combinan en el siguiente enunciado.
Teorema 5. El funcional cuadr atico
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx,
con P(x) > 0 para todo x [x
0
, x
1
], es denido positivo para toda v C
1
0
([x
0
, x
1
]) si y solo si
el intervalo [x
0
, x
1
] no contiene puntos conjugados de x
0
.
A continuaci on aplicaremos estos resultados al problema de optimizaci on
(28) J(u) =
_
x
1
x
0
L(x, u(x), u
(x))dx
con las condiciones de frontera u(x
0
) = u
0
y u(x
1
) = u
1
. Recordemos que la segunda variaci on
de este funcional en un extremo viene dada por
(29)
_
x
1
x
0
_
Pv
2
+ Qv
2
_
dx,
con
P =
1
2
L
u
u
, Q =
1
2
_
L
uu
d
dx
L
uu
_
.
3. CONDICI
ON DE JACOBI. CONDICIONES SUFICIENTES PARA UN M
INIMO 33
Denici on 4. La ecuaci on de Euler
d
dx
(Pv
) +Qv = 0
del funcional cuadr atico (29) es llamada ecuaci on de Jacobi del funcional original dado por (28).
Denici on 5. Se dice que el punto x es conjugado de x
0
con respecto al funcional (28) si es el
conjugado de x
0
con respecto al funcional cuadr atico (29) en el sentido de la Denici on 3.
A continuaci on enunciamos la condici on necesaria de Jacobi:
Teorema 6. Si u es un mnimo del funcional
J(u) =
_
x
1
x
0
L(x, u(x), u
(x))dx
para el cual L
u
u
> 0, entonces el intervalo (x
0
, x
1
) no contiene puntos conjugados de x
0
.
Demostraci on. Ya vimos que una condici on necesaria para la realizaci on de un mnimo de J es la
no negatividad de la segunda variaci on evaluada en dicho mnimo. El Corolario 4 asegura que si el
funcional cuadr atico (29) es no negativo entonces el intervalo (x
0
, x
1
) no puede contener puntos
conjugados de x
0
.
3. Condici on de Jacobi. Condiciones sucientes para un mnimo
En esta secci on formularemos las condiciones sucientes bajo las cuales un funcional de la
forma
(30) J(u) =
_
x
1
x
0
L(x, u(x), u
(x))dx
con condici on de frontera ja, u(x
0
) = u
0
y u(x
1
) = u
1
tiene un mnimo en la curva u. Veremos
que estas condiciones se parecen mucho a las condiciones necesarias obtenidas en las secciones
anteriores. Las condiciones necesarias fueron consideradas separadamente, puesto que cada una
de ellas es necesaria en s misma. Sin embargo, las condiciones sucientes deben considerarse en
conjunto puesto que la presencia de un mnimo est a asegurada solo si se satisfacen todas las condi-
ciones simult aneamente. Demostraremos previamente un lema que usaremos en la demostraci on
del teorema de suciencia.
Lema 4. Sea u una funci on diferenciable con u(x
0
) = u
0
y u(x
1
) = u
1
y v C
1
0
([x
0
, x
1
]).
Entonces si L es tres veces diferenciable con continuidad respecto todos sus argumentos, se tiene
J(u + v) J(u) =
_
x
1
x
0
(Pu
2
+Qu)dx +
_
x
1
x
0
(v
2
+v
2
)dx,
donde , 0 cuando v
1
0.
34 3. LAS CONDICIONES DE JACOBI
Demostraci on. El desarrollo de Taylor de orden dos nos proporciona la identidad
J(u + v) J(u) =
_
x
1
x
0
(L
u
v +L
u
v
)dx +
1
2
_
x
1
x
0
(L
uu
v
2
+ 2L
uu
vv
+L
u
u
v
2
)dx +,
donde el resto, , puede escribirse como
(31) =
_
x
1
x
0
(
1
v
2
+
2
vv
+
3
v
2
)dx.
Debido a la continuidad de las derivadas L
uu
, L
uu
y L
u
u
, se sigue que
i
0 cuando v
1
0,
para i = 1, 2, 3. Ahora, integrando por partes y usando las condici on de frontera de h, podemos
escribir (31) como
_
x
1
x
0
(v
2
+v
2
)dx,
con , satisfaciendo , 0 cuando v
1
0.
Teorema 7. Supongamos que el funcional (30) evaluado en u satisface las siguientes condiciones:
1. La curva u es un extremo, es decir, satisface la ecuaci on de Euler
L
u
(x, u(x), u
(x))
d
dx
L
u
(x, u(x), u
(x)) = 0 para todo x (x
0
, x
1
).
2. A lo largo de la curva u se satisface la condici on estricta de Legendre, es decir
P(x) =
1
2
= L
u
u
(x, u(x), u
(x)) > 0 para todo x (x
0
, x
1
).
3. El intervalo [x
0
, x
1
] no contiene puntos conjugados de x
0
.
Entonces el funcional (30) tiene un mnimo en u.
Demostraci on. Si el intervalo [x
0
, x
1
] no contiene puntos conjugados de x
0
, y si P(x) > 0 en
dicho intervalo, entonces por la continuidad de la soluci on de la Ecuaci on de Jacobi y de la funci on
P, tenemos que tampoco habr a puntos conjugados en un intervalo mayor [x
0
, x
1
+ ], en el cual
tambi en podemos asumir que P > 0. Consideremos ahora el funcional cuadr atico
(32)
_
x
1
x
0
(Pv
2
+Qv)dx
2
_
x
1
x
0
v
2
dx,
que tiene por ecuaci on de Euler
(33)
d
dx
[(P
2
)v
] +Qv = 0.
Puesto que P > 0 en [x
0
, x
1
+ ] y, por tanto, tiene una cota inferior positiva en este intervalo, y
como la soluci on de (33) que satisface las condiciones iniciales v(x
0
) = 0, v
(x
0
) = 1 depende
con continuidad del par ametro , se sigue que
1. P(x)
2
> 0 para todo x [x
0
, x
1
].
2. La soluci on de (33) que satisface las condiciones de frontera v(x
0
) = 0, v
(x
0
) = 1 no
se anula en (x
0
, x
1
].
4. RELACI
ON ENTRE LA CONDICI
ON DE JACOBI Y LA TEOR
IA DE FORMAS CUADR
ATICAS 35
El Teorema 2 implica entonces que el funcional (32) es denido positivo para todo suciente-
mente peque no. Es decir, existe una contante c > 0 tal que
(34)
_
x
1
x
0
(Pv
2
+ Qv)dx > c
_
x
1
x
0
v
2
dx.
A partir de (34) deducimos que el mnimo es, efectivamente, u. En efecto, sea h una curva tal que
u +h est a sucientemente pr oximo a u. Por el Lema 4 tenemos que
J(u +h) J(u) =
_
x
1
x
0
(Pv
2
+ Qv)dx +
_
x
1
x
0
(h
2
+ h
2
)dx,
donde , convergen uniformemente a cero en [x
0
, x
1
] cuando h
1
0. Adem as, usando la
desigualdad de Schwarz obtenemos
h
2
(x) =
_
_
x
x
0
h
dx
_
2
(x x
0
)
_
x
x
0
h
2
dx (x x
0
)
_
x
1
x
0
h
2
dx,
es decir,
_
x
1
x
0
h
2
dx
(x
1
x
0
)
2
2
_
x
1
x
0
h
2
dx,
que implica que
(35)
_
x
1
x
0
(h
2
+h
2
)dx
_
1 +
(x
1
x
0
)
2
2
_
_
x
1
x
0
h
2
dx,
si || y || . Puesto que > 0 puede tomarse arbitrariamente peque no, se sigue de (34) y
(35) que J(u + h) > J(u) para toda h con h
1
sucientemente peque na.
4. Relaci on entre la condici on de Jacobi y la teora de formas cuadr aticas
De acuerdo al Teorema 5, el funcional cuadr atico
(36)
_
b
a
(Pv
2
+ Qv
2
)dx,
donde hemos cambiado la notaci on [x
0
, x
1
] por [a, b], y donde P(x) > 0 para todo x [a, b], es
denido positivo para toda v C
1
0
([a, b]) si y solo si el intervalo [a, b] no contiene puntos conjuga-
dos de a. El funcional (36) es el an alogo a una forma cuadr atica en dimensi on nita. Por tanto, es
natural comenzar estudiando las condiciones de este tipo de formas en un espacio n-dimensional
y luego tomar el lmite n . Esto puede hacerse de la siguiente manera: introduzcamos la
partici on
a = x
0
, x
1
, . . . , x
n
, x
n+1
= b,
del intervalo [a, b], en la cual, por comodidad, suponemos los nodos equiespaciados, x = (b
a)/(n + 1). A continuaci on, consideremos la forma cuadr atica
(37)
n
i=0
_
P
i
_
v
i+1
v
i
x
_
2
+Q
i
v
2
i
_
x,
36 3. LAS CONDICIONES DE JACOBI
donde P
i
, Q
i
y v
i
son los valores de las funciones P, Q y v en los nodos x
i
. Esta forma cuadr atica
proporciona una aproximaci on nito dimensional del funcional cuadr atico (36). Agrupando t ermi-
nos similares y teniendo en cuenta que v
0
= v(a) = 0, v
n+1
= v(b) = 0, podemos escribir (37)
como
(38)
n
i=1
__
Q
i
x +
P
i1
+P
i
x
_
v
2
i
2
P
i1
x
v
i1
v
i
_
.
En otras palabras, el funcional cuadr atico (36) puede aproximarse por una forma cuadr atica de n
variables cuya matriz viene dada por
(39)
_
_
_
_
_
_
_
_
_
_
a
1
b
1
0 . . . 0 0 0
b
1
a
2
b
2
. . . 0 0 0
0 b
2
a
3
. . . 0 0 0
. . . . . . . . . . . . . . . . . . . . . . . . .
0 0 0 . . . b
n2
a
n1
b
n1
0 0 0 . . . 0 b
n1
a
n
_
_
_
_
_
_
_
_
_
_
,
donde
a
i
= Q
i
x +
P
i1
+ P
i
x
para i = 1, . . . , n,
y
b
i
=
P
i
x
para i = 1, . . . , n 1.
Una matriz como (39) en la cual todos los elementos excepto la diagonal principal y sus dos
diagonales adyacentes se anulan es llamada matriz de Jacobi, y su forma cuadr atica asociada es
llamada forma de Jacobi. Para cualquier matriz de Jacobi existe una f ormula de recurrencia para
el c alculo de los menores principales dados por
D
i
=
a
1
b
1
0 . . . 0 0 0
b
1
a
2
b
2
. . . 0 0 0
0 b
2
a
3
. . . 0 0 0
. . . . . . . . . . . . . . . . . . . . . . . .
0 0 0 . . . b
i2
a
i1
b
i1
0 0 0 . . . 0 b
i1
a
i
,
para i = 1, . . . , n. En efecto, expandiendo D
i
con respecto a los elementos de la ultima la,
obtenemos la f ormula
(40) D
i
= a
i
D
i1
b
2
i1
D
i2
,
que nos permite determinar D
3
, . . . , D
n
en t erminos de los dos primeros menores. De hecho, si
tomamos D
0
= 1 y D
1
= 0, entonces esta f ormula es v alida para todo i = 1, . . . , n.
4. RELACI
ON ENTRE LA CONDICI
ON DE JACOBI Y LA TEOR
IA DE FORMAS CUADR
ATICAS 37
El criterio de Silvester asegura que una forma cuadr atica sim etrica es denida positiva si y
solo si todos los menores D
i
son positivos. Podemos as obtener un criterio para que el funcio-
nal cuadr atico (36) sea denido positivo haciendo n en la f ormula (40) . Sustituyendo la
expresi on de los coecientes a
i
y b
i
en dicha f ormula, obtenemos
(41) D
i
=
_
Q
i
x +
P
i1
+P
i
x
_
D
i1
P
2
i1
(x)
2
D
i2
,
para i = 1, . . . , n. Es obviamente imposible pasar directamente al lmite n en esta expresi on,
puesto que los coecientes de D
i1
y D
i2
se hacen innitos. Para evitar esta dicultad realizamos
el cambio
D
i
=
P
1
. . . P
i
Z
i+1
(x)
i+1
, D
0
=
Z
1
x
= 1, D
1
= Z
0
= 0,
para i = 1, . . . , n. La f ormula (41) se escribe entonces, en t erminos de las variables Z
i
como
P
1
. . . P
i
Z
i+1
(x)
i+1
=
_
Q
i
x +
P
i1
+P
i
x
_
P
1
. . . P
i1
Z
i
(x)
i
P
2
i1
(x)
2
P
1
. . . P
i2
Z
i1
(x)
i1
,
es decir
(42) Q
i
Z
i
(x)
2
+ P
i1
Z
i
+P
i
Z
i
P
i
Z
i+1
P
i1
Z
i1
= 0,
o
Q
i
Z
i
1
x
_
P
i
Z
i+1
Z
i
x
P
i1
Z
i
Z
i1
x
_
= 0,
para i = 1, . . . , n. Pasando al lmite n obtenemos la ecuaci on diferencial
d
dx
(PZ
) + QZ = 0,
que es justamente la ecuaci on de Jacobi.
La condici on de que las cantidades D
i
sean positivas es equivalente a la condici on de que las
cantidades Z
i
que satisfacen la ecuaci on en diferencias (42) sean positivas ya que el factor
P
1
. . . P
i
(x)
i+1
es siempre positivo (ya que P(x) > 0). De modo que hemos probado que la forma cuadr atica (36)
es denida positiva si y solo si todas, excepto las primeras n + 2 cantidades Z
0
, . . . , Z
n+1
que
satisfacen la ecuaci on en diferencias (42) son positivas.
Ahora, si consideramos la lnea poligonal
n
con v ertices
(a
0
, Z
0
), (x
1
, Z
1
), . . . , (b, Z
n+1
),
la condici on de que Z
0
= 0 y Z
i
> 0 para i = 1, . . . , n + 1 signica que
n
no corta el intervalo
[a, b] excepto en el punto a. As, cuando x 0, la ecuaci on en diferencias (42) se transforma en
la ecuaci on de Jacobi, y la lnea poligonal
n
tiende a una soluci on no trivial de dicha ecuaci on ,
la cual satisface la condici on inicial
Z(a) = Z
0
= 0, Z
(a) = lm
x0
Z
1
Z
0
x
= lm
x0
x
x
= 1,
38 3. LAS CONDICIONES DE JACOBI
y adem as, dicha soluci on no se anula en (a, b]. En otras palabras, cuando n , la forma de
Jacobi converge al funcional cuadr atico (36), y la condici on de que (38) sea denida positiva se
traduce en la condici on de que (36) sea denida positiva (Teorema 5), que es equivalente a que el
intervalo [a, b] no contenga puntos conjugados de a.
CAP
ITULO 4
Introducci on a los m etodos directos. El m etodo de Ritz
Hasta aqu, el modo en que nos hemos aproximado a la resoluci on de los problemas variacio-
nales ha sido mediante t ecnicas que reducen el problema a un problema formulado en t erminos
de ecuaciones diferenciales. Hemos obtenido condiciones necesarias y sucientes para la demos-
traci on de la existencia de soluciones, y su posible c alculo mediante la resoluci on de la ecuaci on
de Euler asociada. Sin embargo, la resoluci on efectiva de estos problemas dista de ser sencilla y
es por ello que la investigaci on ha derivado a otros m etodos, los llamados m etodos directos, que
permiten la obtenci on de soluciones aproximadas al problema original.
1. Sucesiones minimizantes
Existen muchas t ecnicas diferentes agrupadas bajo el nombre de m etodos directos. Sin embar-
go, todas ellas contienen una idea com un, que es la siguiente.
Consideremos el problema de hallar el mnimo de un funcional, J(u), denido en un espacio
Mde funciones admisibles u. Para que el problema tenga sentido, debemos asumir que existen
funciones en Mtales que J(u) < , y adem as que
(43) inf
u
J(u) = > ,
donde el nmo se toma sobre todas las funciones admisibles, u. Entonces, por denici on de ,
existe una sucesi on de funciones {u
n
}, llamada una sucesi on minimizante, tal que
lm
n
J(u
n
) = .
Si la sucesi on {u
n
} tiene una funci on lmite, u, y si es legtimo escribir
(44) J( u) = lm
n
J(u
n
),
es decir,
J( lm
n
u
n
) = lm
n
J(u
n
),
entonces
J( u) = ,
de modo que u es soluci on del problema variacional. Adem as, las funciones de la sucesi on mi-
nimizante {u
n
} pueden tomarse como soluciones aproximadas de nuestro problema. As, para
resolver un problema variacional dado mediante un m etodo directo, debemos
1. Construir una sucesi on minimizante {u
n
}.
39
40 4. INTRODUCCI
ON A LOS M
ETODOS DIRECTOS. EL M
ETODO DE RITZ
2. Demostrar que {u
n
} tiene un lmite, u.
3. Demostrar que se puede tomar el lmite (44).
Observaci on 5. Aunque exista una sucesi on minimizante {u
n
} para un problema variacional
dado, no tiene por qu e existir el lmite. Por ejemplo, consideremos el funcional
J(u) =
_
1
1
x
2
u
2
dx,
donde
u(1) = 1, u(1) = 1.
Obviamente, J(u) s olo toma valores positivos, y
inf
u
J(u) = 0.
Podemos elegir
(45) u
n
(x) =
arctannx
arctann
como la sucesi on minimizante, puesto que
_
1
1
n
2
x
2
dx
(arctann)
2
(1 + n
2
x
2
)
2
<
1
(arctann)
2
_
1
1
dx
1 + n
2
x
2
=
2
narctann
,
y, por tanto, J(u
n
) 0 cuando n . Sin embargo, cuando n , la sucesi on (45) no tiene
lmite en la clase de funciones continuas que satisfacen las condiciones de frontera. 2
Incluso si la sucesi on minimizante tiene un lmite en el sentido de las funciones continuas,
no es una tarea trivial el justicar el paso al lmite (44), puesto que, en general, los funcionales
considerados en el c alculo variacional no son continuos en dicha norma. Sin embargo, (44) puede
justicarse si la continuidad de J(u) se reemplaza por una condici on m as d ebil. En este contexto
introducimos la siguiente denici on.
Denici on 6. Diremos que el funcional J(u) es semicontinuo inferiormente en u Msi, para
todo > 0 existe un > 0 tal que
J(u) J( u) > ,
siempre que u u < .
Tenemos el siguiente resultado
Teorema 8. Si {u
n
} es una sucesi on minimizante del funcional J(u), con funci on lmite u, y si
J(u) es semicontinuo inferiormente en u, entonces
J( u) = lm
n
J(u
n
).
2. EL M
ETODO DE RITZ 41
Demostraci on. Por una parte,
(46) J( u) lm
n
J(u
n
) = inf J(u),
mientras que, por otra parte, dado cualquier > 0,
J(u
n
) J( u) > ,
si n es sucientemente grande. Tomando n , obtenemos
J( u) lm
n
J(u
n
) +,
o, lo que es lo mismo,.
(47) J( u) lm
n
J(u
n
),
puesto que es arbitrario. De (46) y (47), obtenemos la conclusi on del teorema.
2. El m etodo de Ritz
El m etodo de Ritz es uno de los m etodos directos m as usados en el c alculo de variaciones.
Supongamos que estamos buscando el mnimo de un funcional J(u) denido en un espacio de
funciones admisibles, M, que por simplicidad asumiremos que es un espacio vectorial normado.
Sean
(48)
1
,
2
, . . .
una sucesi on innita de funciones de M, y sea M
n
el subespacio lineal ndimensional de M
generado por las primeras n funciones de (48), es decir, el conjunto de todas las combinaciones
lineales de la forma
(49)
1
1
+
2
2
+ . . . +
n
n
,
donde
1
, . . . ,
n
son n umeros reales cualesquiera. Entonces, en cada subespacio M
n
, el funcio-
nal J(u) da lugar a una funci on
(50) J(
1
1
+
2
2
+. . . +
n
n
)
de n variables.
A continuaci on, elegimos
1
, . . . ,
n
de tal manera que se minimice (50), y denotamos por
n
el valor mnimo del funcional y por u
n
el mnimo del mismo. Claramente,
n
no puede crecer
con n, es decir
1
2
. . . ,
puesto que cualquier combinaci on lineal de
1
, . . . ,
n
es autom aticamente una combinaci on li-
neal de
1
, . . . ,
n+1
. Tambi en, cada subespacio de la sucesi on
M
1
, M
2
, . . .
42 4. INTRODUCCI
ON A LOS M
ETODOS DIRECTOS. EL M
ETODO DE RITZ
est a contenido en el siguiente. A continuaci on obtendremos condiciones que garantizan que la
sucesi on u
n
es una sucesi on minimizante.
Denici on 7. La sucesi on (48) es completa en Msi dado cualquier u My cualquier > 0,
existe una combinaci on lineal
n
de la forma (49) tal que
n
u < (donde n depende de ).
Teorema 9. Si el funcional J(u) es continuo (en la norma de M) y si la sucesi on (48) es completa
entonces
lm
n
n
= ,
donde
= inf
u
J(u).
Demostraci on. Dado > 0, sea u
tal que
J(u
) < + .
Tal u
existe para todo > 0, por denici on de . Como J(u) es continuo,
(51) |J(u) J(u
)| < ,
siempre que u u
< = (). Sea
n
una combinaci on lineal de la forma (49) tal que
n
u
< , que existe por ser {
n
} completa, y sea u
n
una combinaci on lineal de la misma
forma pero para la cual se alcanza el mnimo de (50). Entonces, tenemos que
J(u
n
) J(
n
) < + J(u
) < + 2.
Puesto que es arbitrario, se sigue que
lm
n
J(u
n
) = lm
n
n
= .
Bibliografa
[1] L. ELSGOLTZ, Ecuaciones diferenciales y c alculo variacional, Editorial Mir-Rubi nos, Madrid, 1969.
[2] C. FOX, An introduction to the calculus of variations, Dover Publications Inc., New York, 1987.
[3] I.M. GELFAND and S. V. FOMIN, Calculus of variations, Dover Publications Inc., New York, 2000.
43
También podría gustarte
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Optimizacion Dianmica Cerda 20 210 PDFDocumento197 páginasOptimizacion Dianmica Cerda 20 210 PDFAnonymous CNxpRKNAún no hay calificaciones
- Apuntes CIII Tema1Documento13 páginasApuntes CIII Tema1registradoresAún no hay calificaciones
- Analisis IIDocumento45 páginasAnalisis IIfedericoAún no hay calificaciones
- Seemana 5 Tarea 4Documento6 páginasSeemana 5 Tarea 4Dixon MendozaAún no hay calificaciones
- AMII - Guia X - 2017 - 1c - Ecuaciones Diferenciales OrdinariasDocumento30 páginasAMII - Guia X - 2017 - 1c - Ecuaciones Diferenciales OrdinariasJulieta HerreraAún no hay calificaciones
- Tema 2 - Ecuaciones Diferenciales OrdinariasDocumento35 páginasTema 2 - Ecuaciones Diferenciales OrdinariasObjetos RarosAún no hay calificaciones
- Guia para El Control 1Documento5 páginasGuia para El Control 1benjaminAún no hay calificaciones
- Examen ExtraordinarioDocumento11 páginasExamen ExtraordinarioLC SosaAún no hay calificaciones
- Problema Cuerda VibranteDocumento10 páginasProblema Cuerda VibranteLaura SerranoAún no hay calificaciones
- Dossier Geometria DiferencialDocumento9 páginasDossier Geometria DiferencialKjkljk KjkljklAún no hay calificaciones
- Metodo de Runge KuttaDocumento34 páginasMetodo de Runge KuttaSUELDO MIRAVAL JORDAN JOSEPAún no hay calificaciones
- (Schaum - Spiegel Variable ComplejaDocumento12 páginas(Schaum - Spiegel Variable ComplejaClifton Paucar YmontenegroAún no hay calificaciones
- Taller14 PVFDF ElipticasDocumento3 páginasTaller14 PVFDF ElipticasAlexandra AguirreAún no hay calificaciones
- Dialnet LaEcuacionIconicaYElTrazadoDeRayosSismicos 6595775Documento10 páginasDialnet LaEcuacionIconicaYElTrazadoDeRayosSismicos 6595775Katherin Herrera HernandezAún no hay calificaciones
- Tema 4Documento3 páginasTema 4Maria Veronica Arismendi PerezAún no hay calificaciones
- Derivadas ParcialesDocumento33 páginasDerivadas ParcialesEdgar CoetoAún no hay calificaciones
- Las Ecuaciones Diferenciales Más AntiguasDocumento7 páginasLas Ecuaciones Diferenciales Más AntiguasD. Francisco MedranoAún no hay calificaciones
- Teorias Gauge JESUS SEVILLADocumento31 páginasTeorias Gauge JESUS SEVILLAJesús Sevilla PérezAún no hay calificaciones
- Problemas de Física Iv Unidad IDocumento3 páginasProblemas de Física Iv Unidad IOlenka MorenoAún no hay calificaciones
- Texto 1 EDODocumento88 páginasTexto 1 EDOBrayson Menacho VelaAún no hay calificaciones
- Eccuaciones DiferencialaesDocumento38 páginasEccuaciones DiferencialaesMARVIL DELGADO FLORESAún no hay calificaciones
- Ecuacion de CampoDocumento7 páginasEcuacion de CampoCarlos RairanAún no hay calificaciones
- Tarea 3Documento3 páginasTarea 3Emanuel Martínez FloresAún no hay calificaciones
- Apuntes de Métodos VariacionalesDocumento81 páginasApuntes de Métodos VariacionalesMarco AntonioAún no hay calificaciones
- Método de Los Elementos Finitos en Una Dimensión (MEF)Documento16 páginasMétodo de Los Elementos Finitos en Una Dimensión (MEF)Juan Camilo GarzónAún no hay calificaciones
- Milonga TFG Sept2020Documento68 páginasMilonga TFG Sept2020ARIEL-103Aún no hay calificaciones
- Asignacion 3Documento26 páginasAsignacion 3Elis saul ChirinosAún no hay calificaciones
- Tarea 3Documento5 páginasTarea 3AlexanderEscalanteAún no hay calificaciones
- Ecuaciones Diferenciales: AnuladorDocumento5 páginasEcuaciones Diferenciales: AnuladorSantiago Anarcoiris HerederoAún no hay calificaciones
- Avance Ejercicio 1 y 5 - Octubre 13 de 2022Documento12 páginasAvance Ejercicio 1 y 5 - Octubre 13 de 2022elisa eusseAún no hay calificaciones
- Ecuaciones Diferenciales y Calculo Variacional L EsgoltzDocumento6 páginasEcuaciones Diferenciales y Calculo Variacional L EsgoltzEugenio Martín GallegoAún no hay calificaciones
- Guia Pucp de Ecuaciones DiferencialesDocumento26 páginasGuia Pucp de Ecuaciones DiferencialesMarco AntonioAún no hay calificaciones
- MAT1640 - Ecuaciones Diferenciales T Opicos Claves Del M Odulo 1Documento7 páginasMAT1640 - Ecuaciones Diferenciales T Opicos Claves Del M Odulo 1Pedro LetelierAún no hay calificaciones
- Teoremas de Elasticidad PDFDocumento39 páginasTeoremas de Elasticidad PDFDaniel Alfredo Silva RivadeneiraAún no hay calificaciones
- Tema 4Documento11 páginasTema 4V MulykAún no hay calificaciones
- Ecuaciones Empiricas y LinealizacionDocumento19 páginasEcuaciones Empiricas y LinealizacionYeyson Mendoza huamanAún no hay calificaciones
- Clase 24 Edp Parab ExplDocumento14 páginasClase 24 Edp Parab ExplCristian NarváezAún no hay calificaciones
- Taller 1 Semana 2Documento4 páginasTaller 1 Semana 2Brenda Quispe LescanoAún no hay calificaciones
- Ecuaciones en Derivadas ParcialesDocumento20 páginasEcuaciones en Derivadas ParcialesalexislomasAún no hay calificaciones
- UntitledDocumento4 páginasUntitledFausto CalcagnoAún no hay calificaciones
- Elastic I DadDocumento39 páginasElastic I DadjamesAún no hay calificaciones
- Introducción A Las Ecuaciones Diferenciales I - Quispe Cárdenas MarisaDocumento36 páginasIntroducción A Las Ecuaciones Diferenciales I - Quispe Cárdenas MarisashullerAún no hay calificaciones
- BMA118Documento3 páginasBMA118Adrian ContrerasAún no hay calificaciones
- INECUACIONES CUADRÁTICAS EN UNA VARIABLE y MasDocumento11 páginasINECUACIONES CUADRÁTICAS EN UNA VARIABLE y Masarquimedes lisAún no hay calificaciones
- Resonancia No Lineal: Antonio Camurri RighiDocumento24 páginasResonancia No Lineal: Antonio Camurri RighiOscar Omar Santander MoncayoAún no hay calificaciones
- Análisis II - Artemio González PDFDocumento102 páginasAnálisis II - Artemio González PDFRosi Marleny Machuca rojasAún no hay calificaciones
- NBP MontgomeryDocumento20 páginasNBP MontgomeryJohann Suarez MotatoAún no hay calificaciones
- Optimización DinamicaDocumento197 páginasOptimización DinamicaAngelo Amaro Diaz100% (1)
- Notas de ClaseDocumento42 páginasNotas de ClaseJosue RodriguezAún no hay calificaciones
- Evaluación Unidad 2-3 Ecuaciones DiferencialesDocumento5 páginasEvaluación Unidad 2-3 Ecuaciones Diferencialesjagaye1305Aún no hay calificaciones
- Sesion 14. Ed Primer Ord-Ley NewtonDocumento4 páginasSesion 14. Ed Primer Ord-Ley NewtonAlexAún no hay calificaciones
- Galerkin RitzDocumento14 páginasGalerkin RitzLuisMoyaGuindoAún no hay calificaciones
- 245 - 274Documento30 páginas245 - 274Freddy AguirreAún no hay calificaciones
- Magneto EstaticaDocumento20 páginasMagneto EstaticahugoAún no hay calificaciones
- Ejercicios CD Ene 2020 Interpretacion GeometricaDocumento12 páginasEjercicios CD Ene 2020 Interpretacion GeometricaAlejAún no hay calificaciones
- Subtema 1.1.1Documento4 páginasSubtema 1.1.1Cristian Uriel Dominguez AntonioAún no hay calificaciones
- Ecuaciones DiferencialesDocumento226 páginasEcuaciones DiferencialesJulio Tello Aguilar100% (1)
- S01.s1-Ecuacion Diferencial Ordinaria - Orden.Solucion General y ParticularDocumento20 páginasS01.s1-Ecuacion Diferencial Ordinaria - Orden.Solucion General y ParticularEu DerbAún no hay calificaciones
- INFORME CALCULO II EnfriamientoDocumento27 páginasINFORME CALCULO II EnfriamientoedwardAún no hay calificaciones
- Trabajo de Calculo Integral Reservatello GodoyDocumento258 páginasTrabajo de Calculo Integral Reservatello GodoyMiguel Gerardino Beraun RiveraAún no hay calificaciones
- Tema 4 NDocumento45 páginasTema 4 NErileth NaranjoAún no hay calificaciones
- 145 Calculo DiferencialDocumento60 páginas145 Calculo DiferencialJennifer Molina DiazAún no hay calificaciones
- 10 Metodos Numericos EjerciciosDocumento3 páginas10 Metodos Numericos EjerciciosAmado MalcaAún no hay calificaciones
- Semana 2 - Taller - EDO - CUC PDFDocumento29 páginasSemana 2 - Taller - EDO - CUC PDFJ.J RubiksAún no hay calificaciones
- DERIVADAS Funciones Trigonométricas Inversas Y LOGARÍTMICASDocumento4 páginasDERIVADAS Funciones Trigonométricas Inversas Y LOGARÍTMICASCamila Alejandra Cruz HernándezAún no hay calificaciones
- Protocolo Individual - Calculo Integral - Unidad1Documento2 páginasProtocolo Individual - Calculo Integral - Unidad1Jesús GuerrąAún no hay calificaciones
- Definiciones y Terminologia PDFDocumento14 páginasDefiniciones y Terminologia PDFJeisson VelandiaAún no hay calificaciones
- Unidad 4 Ecuaciones DiferencialesDocumento13 páginasUnidad 4 Ecuaciones DiferencialesSergio SehrgAún no hay calificaciones
- 11 y 12 Edo Separable LinealDocumento2 páginas11 y 12 Edo Separable LinealDennis Quispe SanchezAún no hay calificaciones
- Libro Ecu CorrecDocumento236 páginasLibro Ecu CorrecVladimir MorenoAún no hay calificaciones
- Aplicaciones Geométricas y FísicasDocumento87 páginasAplicaciones Geométricas y FísicasLeonel Lopez LopezAún no hay calificaciones
- ProblemarioDeEc DifDocumento19 páginasProblemarioDeEc DifDiacono100% (1)
- Tarea 1 - Ecuaciones Diferenciales de Primer Orden - Grupo 381Documento29 páginasTarea 1 - Ecuaciones Diferenciales de Primer Orden - Grupo 381Fabio Fernandez RAún no hay calificaciones
- 1ra Serie E.diferencialesDocumento4 páginas1ra Serie E.diferencialesGaby RubioAún no hay calificaciones
- Unidad 5 - Aplicaciones de La DerivadaDocumento22 páginasUnidad 5 - Aplicaciones de La DerivadajuanestevezAún no hay calificaciones
- Notas de Clase Calculo Integral Clase #6Documento28 páginasNotas de Clase Calculo Integral Clase #6NIÑO TOLOSA HUGO FERNEYAún no hay calificaciones
- Semana 09Documento11 páginasSemana 09ronaldAún no hay calificaciones
- Folleto de Ecuaciones Diferenciales PDFDocumento73 páginasFolleto de Ecuaciones Diferenciales PDFHenryPeñaAún no hay calificaciones
- Programa de Calculo DiferencialDocumento13 páginasPrograma de Calculo Diferencialniltoncapa100% (1)
- ModeloDocumento29 páginasModeloMarcelo OrtegaAún no hay calificaciones
- U1P2 Ec Diferenciales ColaborativoDocumento46 páginasU1P2 Ec Diferenciales ColaborativoIvan Dario LoperaAún no hay calificaciones
- Análisis Dinámico - Ecuaciones Diferenciales 51.Documento51 páginasAnálisis Dinámico - Ecuaciones Diferenciales 51.Fabiola GuzmánAún no hay calificaciones