02 Análisis Vectorial !!
Cargado por
Margorie Chavez Leiva02 Análisis Vectorial !!
Cargado por
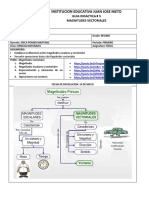
Margorie Chavez LeivaANALISIS VECTORIAL
Las cantidades o magnitudes físicas por su naturaleza o forma vectoriales y usando una escala adecuada también pueden
geométrica pueden ser agrupadas como escalares o vectoriales. representar la medida de las magnitudes vectoriales.
1. MAGNITUDES ESCALARES: Ejemplo:
Representación de un vector en el plano:
Existen cantidades físicas como el volumen, la densidad, la
energía, el trabajo, la potencia, la masa, ….etc para tener una y
𝑣⃗ : Se lee vector “v”
idea clara de esta magnitud solamente debemos conocer el V
B 𝑥: eje de abscisas
valor y la unidad. 𝑦: eje de ordenadas
𝑜: origen de coordenadas
A A: origen del vector
Si decimos que en un vaso el B: extremo del vector
o x
volumen de agua es 0.3 litros
tendremos un concepto claro Los elementos de un vector son:
de esta magnitud física:
El valor será 0,3 y la unidad el El módulo o magnitud |𝑣⃗|, es la longitud o medida AB del
AGUA litro. vector.
En el plano, la dirección del vector se representa con el
ángulo () antihorario medido desde el eje x positivo hasta la
ubicación del vector.
Las magnitudes escalares son aquellas que quedan bien
establecidas conociendo solamente su valor unidad. Todo vector queda bien definido conociendo su módulo y
dirección, siendo estos sus elementos.
2. MAGNITUDES VECTORIALES:
Para mejorar la descripción de las magnitudes algunas de estas 4. REPRESENTACIÓN ANALITICA:
requieren, aparte de su valor y unidad, cierta orientación. En el plano cartesiano, un vector queda bien definido
Ejemplos: conociendo su origen (A) y extremo (B).
El vector ⃗⃗⃗⃗⃗
𝑉 será:
Cuando decimos que el peso de ⃗⃗⃗⃗⃗ y
una persona es 700 N, 𝑉 = extremo – origen
By B
entendemos que el valor del V
peso es 700 y la unidad el ⃗⃗⃗⃗⃗
𝑉 =B–A
Newton (N), pero sabemos Ay A
también que el peso se dirige Reemplazando:
hacia ABAJO, siendo esta su ⃗⃗⃗⃗⃗
𝑉 = (Bx ; By) – (Ax ; Ay)
dirección. Ax Bx x
o
⃗⃗⃗⃗⃗
𝑉 = (Bx – Ax; By – Ay)
700 N
5. VECTOR UNITARIO: y
Cuando mencionamos que la En el diagrama se observa
C
velocidad de un helicóptero es un vector ⃗⃗⃗⃗⃗
𝐶 , si en la c
25 m/s
de 25 m/s, también debemos misma dirección de ⃗⃗⃗⃗⃗ 𝐶 I
mencionar hacia donde está trazamos otro vector (⃗⃗⃗⃗⃗
𝜇 𝐶)
orientada esta velocidad de modulo igual a la unidad
(arriba, abajo, derecha, diremos que ⃗⃗⃗⃗⃗𝜇 𝐶 es el
izquierda, ..etc) ósea debemos vector unitario de ⃗⃗⃗⃗⃗
𝐶 . x
dar a conocer una dirección
El vector unitario de un vector es otro vector en la misma
Así como el peso y la velocidad, otras cantidades físicas como:
dirección cuyo módulo es la unidad.
la aceleración, el impulso, el desplazamiento, la fuerza y
algunas más requieren una DIRECCIÓN, aparte de su valor y
unidad. Matemáticamente el vector unitario se halla dividiendo el vector
entre su respectivo módulo.
Las magnitudes vectoriales son aquellas que aparte de valor y ⃗⃗⃗⃗⃗
𝐶
unidad requieren de cierta dirección para quedar bien definidas. ⃗⃗⃗⃗⃗
𝜇𝐶 =
⃗⃗⃗⃗⃗
|⃗⃗⃗⃗⃗
𝐶|
3. VECTORES
Para representar la velocidad de un avión podemos hacer lo
siguiente:
➢ Empleamos una flecha o
zaeta que indicará que la
dirección de la velocidad 80 m/s
es hacia la derecha.
➢ Una escala adecuada
indicará que esta
velocidad es de 80 m/s.
Luego: estas flechas o zaetas son los llamados VECTORES.
Los vectores son segmentos de recta orientados que se
emplean para representar la dirección de las magnitudes
6. VECTORES UNITARIOS PRINCIPALES: B. DIFERENCIA DE DOS VECTORES:
En cualquier dirección y Sean ⃗⃗⃗⃗⃗
𝐴 y ⃗⃗⃗⃗⃗
𝐵 los
es posible determinar vectores y el ángulo
el respectivo vector A
que estos forman, para
unitario, en el plano hallar la diferencia ⃗⃗⃗⃗⃗
𝐴 -
cartesiano, en las J ⃗⃗⃗⃗⃗
direcciones “x” y “y”, 𝐵 debemos:
los vectores unitarios
B
reciben nombres
especiales, estos son i i PROCEDIMIENTO:
o a. Invertir el sentido
y J respectivamente. x A
del vector ⃗⃗⃗⃗⃗
𝐵 con el
objeto de obtener el
i = (1; 0) en la dirección horizontal.
vector opuesto - ⃗⃗⃗⃗⃗
𝐵 180 -
y poder construir la
J = (0; 1) en la dirección vertical diferencia. -B B
b. Seguir el A-B A
Cualquier vector puede ser expresado en función de los
vectores unitarios principales i y J procedimiento del
método del
A
paralelogramo.
7. SUMA GEOMETRICA DE VECTORES:
180 -
Conocidos dos vectores ⃗⃗⃗⃗⃗
𝐴 y ⃗⃗⃗⃗⃗
𝐵 , la suma de estos no solo
dependerá de sus módulos, sino también de sus respectivas En la fórmula del paralelogramo:
B
-B
direcciones, ósea del ángulo que estos forman. 2
Existen varios métodos geométricos para sumar o restar |⃗⃗⃗⃗⃗
𝐴 − ⃗⃗⃗⃗⃗
𝐵 | = 𝐴2 + 𝐵 2 + 2𝐴𝐵𝐶𝑜𝑠 (180 − 𝜃)
vectores: De la trigonometría se sabe que: Cos(180 - ) =
-Cos
7.1. MÉTODO DEL PARALELOGRAMO:
Se emplea para sumar o restar dos vectores coplanares Luego:
concurrentes.
2
|⃗⃗⃗⃗⃗
𝐴 − ⃗⃗⃗⃗⃗
𝐵 | = 𝐴2 + 𝐵 2 − 2𝐴𝐵𝐶𝑜𝑠𝜃
La suma o resta de dos vectores depende de sus módulos
y también del ángulo que estos forman.
7.2. MÉTODO DEL TRIÁNGULO:
Se emplea para
A. SUMA DE DOS VECTORES: sumar dos vectores
Sean ⃗⃗⃗⃗⃗
𝐴 y ⃗⃗⃗⃗⃗
𝐵 los ordenándolos
vectores y el ángulo secuencialmente, el A
que estos forman, para A vector resultante se
sumar estos vectores trazará desde el
debemos proceder del primer origen hasta el
siguiente modo: último extremo.
Sean ⃗⃗⃗⃗⃗
𝐴 y ⃗⃗⃗⃗⃗
𝐵 los
B vectores que deben
PROCEDIMIENTO: sumarse según el B
a. Juntar los orígenes A método del triángulo.
de los vectores A y
B observando el PROCEDIMIENTO:
A B
ángulo “” que a. Ordenar los vectores
estos forman. ⃗⃗⃗⃗⃗
B 𝐴 y ⃗⃗⃗⃗⃗
𝐵 colocando un
vector después de
b. Por el extremo de A otro.
cada vector trace
una paralela al otro B
b. El vector resultante ⃗⃗⃗⃗⃗
𝑅 A
vector formando el R
se traza desde el
paralelogramo. B primer origen hasta el
último extremo.
Vectorialmente:
c. El vector resultante
R es el vector que 𝑅⃗⃗ = ⃗⃗⃗⃗⃗
𝐴 + ⃗⃗⃗⃗⃗
𝐵
A R
parte del origen En esta ecuación no se debe reemplazar los módulos
común y que se
de los vectores ⃗⃗⃗⃗⃗
𝐴 o ⃗⃗⃗⃗⃗
𝐵
halla sobre una de
las diagonales del
7.3. MÉTODO DEL POLÍGONO:
paralelogramo. B
Si ordenamos
Vectorialmente:
secuencialmente 3 ó más A
R = A + B ….(*) vectores tal como se hace
en el método del
En esta ecuación (*) no debe reemplazarse los triángulo, el método se
módulo de A ó B. denomina POLÍGONO.
Sean ⃗⃗⃗⃗⃗
𝐴 , ⃗⃗⃗⃗⃗
𝐵 y ⃗⃗⃗⃗⃗𝐶 los B
d. Para hallar el módulo del vector resultante |𝑅| vectores que sumaremos
se debe usar la fórmula del paralelogramo: según este método: C
|𝑅|2 = 𝐴2 + 𝐵 2 + 2𝐴𝐵 𝐶𝑜𝑠
PROCEDIMIENTO: 02. En el plano cartesiano se muestra un vector ⃗⃗⃗⃗⃗
𝑆 , halle:
A
a. Ordenamos los vectores ❖ El vector ⃗⃗⃗⃗⃗
𝑆
⃗⃗⃗⃗⃗
𝐴 , ⃗⃗⃗⃗⃗
𝐵 y ⃗⃗⃗⃗⃗
𝐶 uno a ❖ El módulo del vector ⃗⃗⃗⃗⃗
𝑆.
continuación del otro
B ❖ La dirección del vector ⃗⃗⃗⃗⃗
𝑆
uniendo extremos con
orígenes. y
B 7
b. El vector resultante ⃗⃗⃗⃗⃗
𝑅 C S
se traza desde el primer
A
origen hasta el último
extremo.
Vectorialmente:
2
-4 o x
⃗⃗⃗⃗
𝑅 = ⃗⃗⃗⃗⃗
𝐴 + ⃗⃗⃗⃗⃗
𝐵 + ⃗⃗⃗⃗⃗
𝐶 B
-1 A
En esta ecuación no se
debe reemplazarse los R
módulos de ⃗⃗⃗⃗⃗
𝐴 , ⃗⃗⃗⃗⃗
𝐵 𝑜 𝐶⃗
C
A) ⃗⃗⃗⃗⃗ 𝑆 | = 10; = 127ºg
𝑆 = (-6; 8); |⃗⃗⃗⃗⃗
B) ⃗⃗⃗⃗⃗ 𝑆 | = 9; = 126º
𝑆 = (-5; 7); |⃗⃗⃗⃗⃗
C) ⃗⃗⃗⃗⃗ 𝑆 | = 8; = 125º
𝑆 = (-4; 6); |⃗⃗⃗⃗⃗
D) ⃗⃗⃗⃗⃗ 𝑆 | = 7; = 124º
𝑆 = (-3; 5); |⃗⃗⃗⃗⃗
8. DESCOMPOSICIÓN RECTANGULAR:
Es la representación de un vector en función de otros vectores E) ⃗⃗⃗⃗⃗ 𝑆 | = 6; = 123º
𝑆 = (-2; 4); |⃗⃗⃗⃗⃗
ubicados sobre dos direcciones mutuamente perpendiculares.
03. Se muestra un cuadrado de 4 unidades de lado dividido
“x” y “y”: son las direcciones uniformemente en 16 cuadrados pequeños, para los 3 vectores
y mostrados, halle:
perpendiculares.
Vx y Vy: son las ❖ El vector resultante
componentes del ❖ El módulo del vector resultante
Vy V
vector ⃗⃗⃗⃗⃗
𝑉
Las componentes se pueden V
hallar usando el ángulo “” o
el ángulo “”.
Vx x
Vx = V Cos = VSen
Vy = VSen = VCos
Ejemplos: A) (5, 4); √17 B) (4, 3); √16 C) (3, 2); √13
D) (2, 1); √14 E) (6, 5); √15
20Sen 30o 20 40Cos 53o 40 04. Dado el vector ⃗⃗⃗⃗⃗
𝐶 en el plano cartesiano, determine:
❖ El vector ⃗⃗⃗⃗⃗
𝐶
❖ El módulo del vector ⃗⃗⃗⃗⃗
𝐶
❖ El vector unitario de ⃗⃗⃗⃗⃗
𝐶
53o
y
30o
o o 4
20Cos 30 20Sen 53
C
9. CALCULO DE UNA RESULTANTE USANDO LA
DESCOMPOSICIÓN RECTANGULAR
4
-8 o x
-1 A
TRANSFERENCIA nº 1
9 3
A) ⃗⃗⃗⃗⃗
𝐶 = (-16; 1); |⃗⃗⃗⃗⃗
𝐶 | = 9; 𝜇𝑐 = ( ; )
12 12
12 5
⃗⃗,
01. En el plano cartesiano se ha representado un vector 𝑉 B) ⃗⃗⃗⃗⃗
𝐶 = (-15; 2); |⃗⃗⃗⃗⃗
𝐶 | = 10; 𝜇𝑐 = ( ;− )
13 13
⃗⃗:
determine el vector 𝑉 C) ⃗⃗⃗⃗⃗
𝐶 = (-14; 3); |⃗⃗⃗⃗⃗
𝐶 | = 11; 𝜇𝑐 = (−
10
;
5
)
12 12
11 6
D) ⃗⃗⃗⃗⃗
𝐶 = (-13; 4); |⃗⃗⃗⃗⃗
𝐶 | = 12; 𝜇𝑐 = ( ; )
y 13 13
12 5
E) ⃗⃗⃗⃗⃗
𝐶 = (-12; 5); |⃗⃗⃗⃗⃗
𝐶 | = 13; 𝜇𝑐 = (− ; )
5 B 13 13
V
05. Expresar el vector ⃗⃗⃗⃗⃗
𝐶 = (-3; 4) en función de los vectores
unitarios i y J.
2 A) (-1; 2) = -3i + 8J B) (-2; 3) = -3i + 7J
A
C) (-3; 4) = -3i + 6J D) (-4; 5) = -3i + 5J
E) (-5; 6) = -3i + 4J
o 1 5 x 06. Para los vectores ⃗⃗⃗⃗⃗
𝐴 y ⃗⃗⃗⃗⃗
𝐵 representados en la figura, hallar:
❖ El vector resultante en función de los vectores unitarios
principales.
A) (5; 4) B) (4; 3) C) (3; 2)
❖ El módulo del vector resultante.
D) (2; 1) E) (6; 5)
❖ El vector unitario del vector resultante.
y 12. Un yate navega 30 km hacia el este y luego navega 60 km en
4 la dirección E 60ºN, hállese la distancia neta que avanzó el
3
A yate.
2 A) 20 √7 km B) 25 √7 km C) 30 √7 km
D) 35 √7 km E) 40 √7 km
-2 o 1 2 3 x 13. Empleando dos cuerdas con las cuales se hacen fuerzas de
-1 B 600 N y 800 N es jalado un tanque, si el módulo de la diferencia
de estas fuerzas es 1000 N, halle el ángulo .
2 1
A) ⃗⃗⃗⃗⃗
𝑅 = 2i – J; |⃗⃗⃗⃗⃗
𝑅 | = √33; ⃗⃗⃗⃗⃗
𝜇𝑅 = ( ;− ) 800N
√37 √33
3 1
B) ⃗⃗⃗⃗⃗
𝑅 = 3i – J; |⃗⃗⃗⃗⃗
𝑅 | = √34; ⃗⃗⃗⃗⃗
𝜇𝑅 = ( ;− )
√37 √34
4 1
C) ⃗⃗⃗⃗⃗
𝑅 = 4i – J; |⃗⃗⃗⃗⃗
𝑅 | = √35; ⃗⃗⃗⃗⃗
𝜇𝑅 = ( ;− )
√37
5
√35
1
D) ⃗⃗⃗⃗⃗
𝑅 = 5i – J; |⃗⃗⃗⃗⃗
𝑅 | = √36; ⃗⃗⃗⃗⃗
𝜇𝑅 = ( ;− )
√37 √36 600N
6 1
E) ⃗⃗⃗⃗⃗
𝑅 = 6i – J; |⃗⃗⃗⃗⃗
𝑅 | = √37; ⃗⃗⃗⃗⃗
𝜇𝑅 = ( ;− )
√37 √37
07. Las fuerzas F1 = 3N y F2 = 5N están aplicadas en el mismo A) 70º B) 75º C) 80º
punto “O” formando 60º, halle el módulo de la fuerza resultante. D) 85º E) 90º
F1 14. Determine el ángulo entre dos vectores conociéndose que el
módulo de la suma de estos vectores es igual al módulo de la
diferencia.
A) 70º B) 75º C) 80º
o 60o D) 85º E) 90º
F2
15. Se muestra un triángulo formado por tres vectores ⃗⃗⃗⃗⃗
𝐴 , ⃗⃗⃗⃗⃗
𝐵 y ⃗⃗⃗⃗⃗
𝐶,
¿qué relación vectorial se puede establecer entre estos
A) 10 N B) 9 N C) 8 N vectores?
D) 7 N E) 6 N
A C
08. Un hombre y un muchacho empujan un fardo haciendo fuerzas
de 100 N y 80 N, las direcciones de las fuerzas forman 37º,
hállese el módulo del vector diferencia.
A) 60 N B) 50 N C) 40 N
D) 30 N E) 30 N
09. Sobre una argolla actúan dos fuerzas, como se puede ver en el
B
diagrama, calcule el módulo de la fuerza resultante.
A) ⃗⃗⃗⃗⃗
𝐴 = ⃗⃗⃗⃗⃗
𝐵 - ⃗⃗⃗⃗⃗
𝐶 B) ⃗⃗⃗⃗⃗
𝐴 = ⃗⃗⃗⃗⃗
𝐵 + ⃗⃗⃗⃗⃗
𝐶 C) ⃗⃗⃗⃗⃗
𝐵 = ⃗⃗⃗⃗⃗
𝐴 - ⃗⃗⃗⃗⃗
𝐶
60N
D) ⃗⃗⃗⃗⃗
𝐵 = ⃗⃗⃗⃗⃗
𝐴 + ⃗⃗⃗⃗⃗
𝐶 E) ⃗⃗⃗⃗⃗
𝐶 = ⃗⃗⃗⃗⃗
𝐴 - ⃗⃗⃗⃗⃗
𝐶
30N
16. En el polígono se muestran los vectores ⃗⃗⃗⃗⃗⃗
𝑀 , ⃗⃗⃗⃗⃗⃗
𝑁 , ⃗⃗⃗⃗⃗
𝑃 y ⃗⃗⃗⃗⃗
𝑄 . ¿Qué
relación vectorial se puede establecer entre estos?
50o 70o
M N
A) 20 √5 N B) 25 √6 N C) 30√7 N
D) 35√8 N E) 15 √3 N
10. En un bote se intenta cruzar perpendicularmente un río cuya
corriente tiene una velocidad de 15 km/h, halle la velocidad
resultante del bote en el río, si en aguas tranquilas su velocidad P
Q
es de 20 km/h.
A) 20 km/h B) 25 km/h C) 30 km/h A) ⃗⃗⃗⃗⃗⃗
𝑀 + ⃗⃗⃗⃗⃗
𝑃 = ⃗⃗⃗⃗⃗
𝑄 + ⃗⃗⃗⃗⃗⃗
𝑁 B) ⃗⃗⃗⃗⃗⃗
𝑀 - ⃗⃗⃗⃗⃗
𝑃 = ⃗⃗⃗⃗⃗
𝑄 + ⃗⃗⃗⃗⃗⃗
𝑁
D) 35 km/h E) 40 km/h C) ⃗⃗⃗⃗⃗⃗
𝑀 + ⃗⃗⃗⃗⃗
𝑃 = ⃗⃗⃗⃗⃗
𝑄 - ⃗⃗⃗⃗⃗⃗
𝑁 D) ⃗⃗⃗⃗⃗⃗
𝑀 - ⃗⃗⃗⃗⃗
𝑃 = ⃗⃗⃗⃗⃗
𝑄 - ⃗⃗⃗⃗⃗⃗
𝑁
E) ⃗⃗⃗⃗⃗⃗
𝑀 + ⃗⃗⃗⃗
𝑄= ⃗⃗⃗⃗⃗
𝑃 + ⃗⃗⃗⃗⃗⃗
𝑁
11. Un vagón de carga se empuja y jala como podemos ver en la
figura, determínese el módulo de la fuerza resultante.
17. Halle el vector resultante ⃗⃗⃗⃗⃗ 𝑎 ⃗⃗⃗⃗⃗
𝑅 para los vectores ⃗⃗⃗⃗⃗, 𝑐 𝑦 ⃗⃗⃗⃗⃗
𝑏 , ⃗⃗⃗⃗ 𝑑 que
50N se muestran en el diagrama.
53o
a
20N
A) 5√40 B) 10√41 C) 15√42
D) 20√43 E) 25√44
d c
⃗⃗⃗⃗⃗
A) 5𝑑 ⃗⃗⃗⃗⃗
B) 4𝑑 ⃗⃗⃗⃗⃗
C) 3𝑑
D) ⃗⃗⃗⃗⃗
2𝑑 E) ⃗⃗⃗⃗⃗
1𝑑
18. Usando el triángulo vectorial determine |⃗⃗⃗⃗⃗
𝐶 − ⃗⃗⃗⃗⃗
𝐵 |, si además
⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗
| 𝐴 | = 4, | 𝐵 | = 6 y | 𝐶 | = 7
A) 5 B) 4 C) 3
D) 2 E) 1
19. Encuentre el vector resultante en el conjunto de vectores que
se muestra:
s
n
p
q
m
A) 5 ⃗⃗⃗⃗⃗
𝑝 B) 4 ⃗⃗⃗⃗⃗
𝑝 C) 3 ⃗⃗⃗⃗⃗
𝑝
D) 2 ⃗⃗⃗⃗⃗
𝑝 E) 6 ⃗⃗⃗⃗⃗
𝑝
20. En el esquema se muestran los módulos de tres vectores
ubicados en un sistema de ejes “x” y “y”. Calcule el módulo del
vector resultante.
y
10
4 37o
x
3
A) 1 B) 2 C) 3
D) 4 E) 5
También podría gustarte
- Vectores en Física: Definición y OperacionesAún no hay calificacionesVectores en Física: Definición y Operaciones10 páginas
- Fundamentos de Vectores en FísicaAún no hay calificacionesFundamentos de Vectores en Física4 páginas
- U 4 - Análisis Vectorial I (Métodos Gráficos)Aún no hay calificacionesU 4 - Análisis Vectorial I (Métodos Gráficos)11 páginas
- Guia #2 Vectores y Sus Aplicaciones 2024Aún no hay calificacionesGuia #2 Vectores y Sus Aplicaciones 202411 páginas
- 2 Vector Unitario Suma y Resta de VectoresAún no hay calificaciones2 Vector Unitario Suma y Resta de Vectores24 páginas
- Introducción a Vectores en FísicaAún no hay calificacionesIntroducción a Vectores en Física15 páginas
- Magnitudes Escalares y Vectoriales en FísicaAún no hay calificacionesMagnitudes Escalares y Vectoriales en Física3 páginas
- Métodos Gráficos para Suma de VectoresAún no hay calificacionesMétodos Gráficos para Suma de Vectores5 páginas
- Magnitudes escalares y vectoriales explicadasAún no hay calificacionesMagnitudes escalares y vectoriales explicadas8 páginas
- Conceptos y Operaciones con VectoresAún no hay calificacionesConceptos y Operaciones con Vectores12 páginas
- Fundamentos de Vectores y CoordenadasAún no hay calificacionesFundamentos de Vectores y Coordenadas13 páginas
- Introducción al Álgebra Vectorial en FísicaAún no hay calificacionesIntroducción al Álgebra Vectorial en Física29 páginas
- Diferencias entre cargas y polos magnéticosAún no hay calificacionesDiferencias entre cargas y polos magnéticos20 páginas
- Magnitudes y Operaciones Vectoriales en Física100% (1)Magnitudes y Operaciones Vectoriales en Física7 páginas
- Fundamentos de Estática y VectoresAún no hay calificacionesFundamentos de Estática y Vectores26 páginas
- Conceptos Clave de Vectores en FísicaAún no hay calificacionesConceptos Clave de Vectores en Física6 páginas
- Magnitudes Físicas: Escalares y VectorialesAún no hay calificacionesMagnitudes Físicas: Escalares y Vectoriales33 páginas
- Magnitudes y Operaciones VectorialesAún no hay calificacionesMagnitudes y Operaciones Vectoriales16 páginas
- Fundamentos de Vectores en el PlanoAún no hay calificacionesFundamentos de Vectores en el Plano23 páginas
- Introducción a Vectores en FísicaAún no hay calificacionesIntroducción a Vectores en Física26 páginas
- Análisis de Vectores y Magnitudes FísicaAún no hay calificacionesAnálisis de Vectores y Magnitudes Física7 páginas
- Cantidades Vectoriales y Escalares en FísicaAún no hay calificacionesCantidades Vectoriales y Escalares en Física12 páginas
- Guía de Aprendizaje sobre Vectores en FísicaAún no hay calificacionesGuía de Aprendizaje sobre Vectores en Física7 páginas
- Suma Gráfica de Vectores en FísicaAún no hay calificacionesSuma Gráfica de Vectores en Física23 páginas
- Infografía Sobre Los Problemas Ambientales y Sus Efectos en La Salud Respiratoria100% (1)Infografía Sobre Los Problemas Ambientales y Sus Efectos en La Salud Respiratoria1 página
- Magnitudes Proporcionales y Regla de Tres Enero 2025Aún no hay calificacionesMagnitudes Proporcionales y Regla de Tres Enero 20254 páginas
- Sesión N°03: Contenido y Temas ClaveAún no hay calificacionesSesión N°03: Contenido y Temas Clave2 páginas
- Pirámides Ecológicas y SucesionesAún no hay calificacionesPirámides Ecológicas y Sucesiones20 páginas
- Proyecto de Títeres para la Fauna en PeligroAún no hay calificacionesProyecto de Títeres para la Fauna en Peligro6 páginas
- Escasez de Agua en Lima y MoyobambaAún no hay calificacionesEscasez de Agua en Lima y Moyobamba10 páginas
- Mínimo Común Múltiplo: EjerciciosAún no hay calificacionesMínimo Común Múltiplo: Ejercicios3 páginas
- Historieta sobre la Independencia del PerúAún no hay calificacionesHistorieta sobre la Independencia del Perú4 páginas
- Problemas Resueltos de Triángulos y TrigonometríaAún no hay calificacionesProblemas Resueltos de Triángulos y Trigonometría9 páginas
- Examen de Análisis I: Volúmenes y FuncionesAún no hay calificacionesExamen de Análisis I: Volúmenes y Funciones8 páginas
- Guía de Área y Perímetro para 7° GradoAún no hay calificacionesGuía de Área y Perímetro para 7° Grado10 páginas
- Perímetros de Figuras GeométricasAún no hay calificacionesPerímetros de Figuras Geométricas11 páginas
- Movimientos en el plano: isometrías y didácticaAún no hay calificacionesMovimientos en el plano: isometrías y didáctica31 páginas
- Tipos de Cortes de Piedras PreciosasAún no hay calificacionesTipos de Cortes de Piedras Preciosas10 páginas
- Reacciones en D de disco giratorioAún no hay calificacionesReacciones en D de disco giratorio10 páginas
- Métodos de Rectificación de CircunferenciasAún no hay calificacionesMétodos de Rectificación de Circunferencias3 páginas
- 1ra Práctica de Vectores en El Espacio 2019-IAún no hay calificaciones1ra Práctica de Vectores en El Espacio 2019-I38 páginas
- Problemas de Cinemática de Cuerpos Rígidos100% (1)Problemas de Cinemática de Cuerpos Rígidos7 páginas
- Cuestionario de Selección Policía 2022Aún no hay calificacionesCuestionario de Selección Policía 202235 páginas
- Modelos Lineales en Contextos SocioculturalesAún no hay calificacionesModelos Lineales en Contextos Socioculturales9 páginas
- Práctica de Geometría y TrigonometríaAún no hay calificacionesPráctica de Geometría y Trigonometría3 páginas
- Guia 1. Lapso I. 24-25 Mat 5to AñoAún no hay calificacionesGuia 1. Lapso I. 24-25 Mat 5to Año9 páginas
- Ecuación Canónica y Ejemplos de ElipsesAún no hay calificacionesEcuación Canónica y Ejemplos de Elipses7 páginas
- Introducción a la Geometría DescriptivaAún no hay calificacionesIntroducción a la Geometría Descriptiva2 páginas
- Silabo Geometria y Trigonometria - IV - 2021Aún no hay calificacionesSilabo Geometria y Trigonometria - IV - 202111 páginas
- Geometría Analítica y Álgebra BásicaAún no hay calificacionesGeometría Analítica y Álgebra Básica5 páginas
- Problemas de Triángulos: Rectángulos y OblicuángulosAún no hay calificacionesProblemas de Triángulos: Rectángulos y Oblicuángulos4 páginas
- Cálculo de Vectores y SuperficiesAún no hay calificacionesCálculo de Vectores y Superficies4 páginas
- Geometria Analitica 1º-2º Sec B II - 2021Aún no hay calificacionesGeometria Analitica 1º-2º Sec B II - 20216 páginas
- Guía de Geometría: Área y Volumen del CilindroAún no hay calificacionesGuía de Geometría: Área y Volumen del Cilindro8 páginas
- Ejercicios Resueltos 8.2 - Poliedros (2) - 1Aún no hay calificacionesEjercicios Resueltos 8.2 - Poliedros (2) - 115 páginas