También podría gustarte
- Certificado de SecundariaDocumento1 páginaCertificado de Secundariaalejandro100% (2)
- Laboratorio N. 4 - 1S3202 Alfonso AsprillaDocumento6 páginasLaboratorio N. 4 - 1S3202 Alfonso AsprillaACórdoba 3120Aún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- DISEÑO DETALLADO RetieDocumento15 páginasDISEÑO DETALLADO RetieIVMINGENIERIAAún no hay calificaciones
- Laboratorio 1Documento5 páginasLaboratorio 1Jorge Luis Condori TallacaguaAún no hay calificaciones
- NEO 43 Eslingas de Fibra Sintetica para Elevaciony Movimiento de Cargas en Altura Eslingas Plan PDFDocumento32 páginasNEO 43 Eslingas de Fibra Sintetica para Elevaciony Movimiento de Cargas en Altura Eslingas Plan PDFFREDDYPINOSAún no hay calificaciones
- Iperc RooftopDocumento10 páginasIperc RooftopcesarixAún no hay calificaciones
- Tabla Calculo Por ArancelesDocumento12 páginasTabla Calculo Por ArancelesJostin Delgado FernandezAún no hay calificaciones
- Examen Expresión Gráfica y Diseño Asistido Febrero 2004Documento8 páginasExamen Expresión Gráfica y Diseño Asistido Febrero 2004David Garcia PerezAún no hay calificaciones
- Giordano BrunoDocumento4 páginasGiordano BrunoTomás ToncovicheAún no hay calificaciones
- PRACTICA 3microDocumento6 páginasPRACTICA 3microGustavo Sarmiento AntonioAún no hay calificaciones
- Lem-Prac-R-009 Ensayo de Compresion LadrillosDocumento1 páginaLem-Prac-R-009 Ensayo de Compresion Ladrilloskoko bedreAún no hay calificaciones
- F AutYRob - Ene.16Documento4 páginasF AutYRob - Ene.16Ana BustoAún no hay calificaciones
- Aut - Jun.21 Final SolDocumento6 páginasAut - Jun.21 Final SolCaridad MercaderAún no hay calificaciones
- Reporte Notas Detalladas 2018001177Documento1 páginaReporte Notas Detalladas 2018001177cintia maribel bermudez patalaAún no hay calificaciones
- Formato Insp. de Unif. y Eppb Eppa EppcDocumento2 páginasFormato Insp. de Unif. y Eppb Eppa EppcsadytAún no hay calificaciones
- PT ELE 05 Rev.0 Prueba Hi-PotDocumento1 páginaPT ELE 05 Rev.0 Prueba Hi-PotAnonymous 1LgoS05gvlAún no hay calificaciones
- PC Christian 2Documento4 páginasPC Christian 2Christian TrujilloAún no hay calificaciones
- Instructivo Pintar Parron de TuberiasDocumento5 páginasInstructivo Pintar Parron de Tuberiaskarla donoso caminadaAún no hay calificaciones
- Pro Mixer 01 S2Documento63 páginasPro Mixer 01 S2DemiánSanchezAún no hay calificaciones
- Laboratorio 2Documento5 páginasLaboratorio 2Jorge Luis Condori TallacaguaAún no hay calificaciones
- Trabajo de Analisis IIDocumento28 páginasTrabajo de Analisis IIMaria Alexandra VillarAún no hay calificaciones
- Tarea TablasDocumento21 páginasTarea Tablasdeyvi jhonatan anastacio leonAún no hay calificaciones
- SIPOCDocumento1 páginaSIPOCReyes Nuñez Carlos OrlandoAún no hay calificaciones
- Laboratorio No5Documento7 páginasLaboratorio No5carloAún no hay calificaciones
- Prueba PokerDocumento5 páginasPrueba Pokerandrea100% (1)
- PDS Laboratorio1Documento10 páginasPDS Laboratorio1LeonardoAún no hay calificaciones
- Eiam - T.de Modelacion Bim - Semana 24 Al 29 - Abril - 2601Documento2 páginasEiam - T.de Modelacion Bim - Semana 24 Al 29 - Abril - 2601Claudia EspinozaAún no hay calificaciones
- Unifilar Alimentador DinamómetroDocumento1 páginaUnifilar Alimentador DinamómetroLuis MiguelAún no hay calificaciones
- Calzoescalonado 180521173959Documento2 páginasCalzoescalonado 180521173959Dani ZapicoAún no hay calificaciones
- TMD-T4 TMD-T4s IM303-E v2.8Documento10 páginasTMD-T4 TMD-T4s IM303-E v2.8pedro barbano100% (2)
- Ficha Tecnica de Camisa Clasico.Documento2 páginasFicha Tecnica de Camisa Clasico.Norka Cecilia Puma100% (1)
- Excel Metodo de Mutto Principal y Secundario - Calle CamposDocumento16 páginasExcel Metodo de Mutto Principal y Secundario - Calle CamposBERLYN AQUILES CALLE CAMPOSAún no hay calificaciones
- Rol de Examenes 2021-2Documento4 páginasRol de Examenes 2021-2Roberto Espiritu NeyraAún no hay calificaciones
- S02 S1-EjerciciosDocumento27 páginasS02 S1-EjerciciosAdaluz Osorio AlcaAún no hay calificaciones
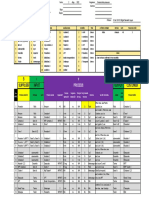
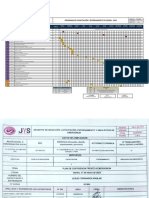
- Jys-Rg-Sig-004 - Programa Anual de CapacitacionesDocumento20 páginasJys-Rg-Sig-004 - Programa Anual de CapacitacionesJersson Rai Velasquez BardalesAún no hay calificaciones
- S01.s2 MaterialDocumento27 páginasS01.s2 MaterialmariAún no hay calificaciones
- Fal Taller So 9-1-19Documento4 páginasFal Taller So 9-1-19Gary MagneAún no hay calificaciones
- Taller 11.Documento7 páginasTaller 11.Raul Peñaranda IquizeAún no hay calificaciones
- 13.3 A4170 - SM - La Union - Protocolo de EpsDocumento4 páginas13.3 A4170 - SM - La Union - Protocolo de EpsChristian AcuñaAún no hay calificaciones
- Diagram A Uni FilarDocumento8 páginasDiagram A Uni FilarVallejos FranzAún no hay calificaciones
- 13.3 A1055 Vitor - Protocolo de EpsDocumento6 páginas13.3 A1055 Vitor - Protocolo de Epseduardo chongAún no hay calificaciones
- 0 Parcial 1Documento5 páginas0 Parcial 1Juany NuñezAún no hay calificaciones
- Entregables Faja CVB025Documento15 páginasEntregables Faja CVB025Madison AldaveAún no hay calificaciones
- Reporte Notas DetalladasDocumento1 páginaReporte Notas DetalladasNelida Gamboa QuispeAún no hay calificaciones
- Sensores WEBDocumento16 páginasSensores WEBINSTRUMENTOS INDUSTRIALES DEL PACIFICOAún no hay calificaciones
- Resistencia de Concretos Cilindros MR45 San Pedro UF4 13Documento1 páginaResistencia de Concretos Cilindros MR45 San Pedro UF4 13Laboratorio IbarraAún no hay calificaciones
- reporteNotasDetalladas - 2022-01-06T075558.128Documento1 páginareporteNotasDetalladas - 2022-01-06T075558.128Edu valdez leonAún no hay calificaciones
- Mazda Transmision SensoresDocumento2 páginasMazda Transmision SensoresSermacat SerteccasAún no hay calificaciones
- AST - Aplicacion de Circuitos InversoresDocumento1 páginaAST - Aplicacion de Circuitos InversoresAlmendra Luana Castro CondorAún no hay calificaciones
- Final 2do Turno REGULARDocumento2 páginasFinal 2do Turno REGULARDaniel VedaniAún no hay calificaciones
- Diagrama Unifilar-ModelDocumento1 páginaDiagrama Unifilar-ModelAnette SuárezAún no hay calificaciones
- Motores Monofasicos de 24 Ranuras-8Documento1 páginaMotores Monofasicos de 24 Ranuras-8Seltromind Srl0% (1)
- Rtei 12 C 2Documento23 páginasRtei 12 C 2Last Juan StandingAún no hay calificaciones
- Soldaduras Viga de RigidezDocumento1 páginaSoldaduras Viga de Rigidezantonio gutierrezAún no hay calificaciones
- Logis Kit Basico Ficha Enviar-1Documento13 páginasLogis Kit Basico Ficha Enviar-1pasbolcorpsAún no hay calificaciones
- J07 Señales de CorienteDocumento1 páginaJ07 Señales de CorienteWILLIAM AGUDELOAún no hay calificaciones
- Procedimiento Distribucion de Personal en Los BusesDocumento7 páginasProcedimiento Distribucion de Personal en Los Busesjuan carlos canchila diazAún no hay calificaciones
- 01 391-Cde-01-F02 Lista de Control de Eq de Seg y Med - 05-06-11Documento2 páginas01 391-Cde-01-F02 Lista de Control de Eq de Seg y Med - 05-06-11CarlosEduardoBonillaVelásquezAún no hay calificaciones
- King Pin-R7207Documento1 páginaKing Pin-R7207Sergio PoloAún no hay calificaciones
- NE300conLB II ParametrosDocumento30 páginasNE300conLB II Parametrosalfredo100% (1)
- Simbolos y EcuacionesDocumento2 páginasSimbolos y EcuacionesRikardoAún no hay calificaciones
- CP EmbotelladoraDocumento8 páginasCP EmbotelladoraAna BustoAún no hay calificaciones
- Feb 12 EC2Documento3 páginasFeb 12 EC2Elena VAún no hay calificaciones
- Res Auto Elec Mayo 13Documento4 páginasRes Auto Elec Mayo 13Elena VAún no hay calificaciones
- Autoe205 Mayo13 Ej2Documento2 páginasAutoe205 Mayo13 Ej2Elena VAún no hay calificaciones
- Autoa207 Marzo13 SolDocumento2 páginasAutoa207 Marzo13 SolElena VAún no hay calificaciones
- Ex Julio2012Documento3 páginasEx Julio2012Elena VAún no hay calificaciones
- Resolución Examen Parcial-Mc - M-301-Qm - Q-308 - Marzo 13Documento3 páginasResolución Examen Parcial-Mc - M-301-Qm - Q-308 - Marzo 13Elena VAún no hay calificaciones
- Resolución Examen Parcial - Elec - A-208 - Marzo 13Documento5 páginasResolución Examen Parcial - Elec - A-208 - Marzo 13Elena VAún no hay calificaciones
- Res autoMecMarzo13Documento2 páginasRes autoMecMarzo13Elena VAún no hay calificaciones
- Res autoElecMarzo13Documento2 páginasRes autoElecMarzo13Elena VAún no hay calificaciones
- Proyecto AutocadDocumento6 páginasProyecto AutocadConstructora Proyecta SJAún no hay calificaciones
- Actividades Ley HookeDocumento1 páginaActividades Ley HookeAnonymous XKsJzHtAún no hay calificaciones
- Informe 1 Metrología DimensionalDocumento7 páginasInforme 1 Metrología DimensionalJuan Vicente DíazAún no hay calificaciones
- Plan de Manejo de Residuos Sólidos en El Centro Poblado de ColliniDocumento6 páginasPlan de Manejo de Residuos Sólidos en El Centro Poblado de CollinidianaAún no hay calificaciones
- Aprendizaje Basado en ProblemasDocumento4 páginasAprendizaje Basado en ProblemasOmar MontalvoAún no hay calificaciones
- Grado Noveno Guia PDFDocumento72 páginasGrado Noveno Guia PDFJuanma AriasAún no hay calificaciones
- 1200 Ejercicios de Todo 209-270 NoPW JajajaDocumento270 páginas1200 Ejercicios de Todo 209-270 NoPW JajajaEmmanuel Sánchez TovarAún no hay calificaciones
- MEMORIA DE CALCULO SANITARIO - Bloque 21 UnipacificoDocumento20 páginasMEMORIA DE CALCULO SANITARIO - Bloque 21 UnipacificoJames Orobio BallesterosAún no hay calificaciones
- Bingo de PorcentajesDocumento24 páginasBingo de PorcentajesAnalia Rossi GarcíaAún no hay calificaciones
- S01 - L1 - Situación Comunicativa y Variedad AcadémicaDocumento13 páginasS01 - L1 - Situación Comunicativa y Variedad AcadémicaJhordan Ivan Abanto Tamayo100% (1)
- Cuestionario Fase 2Documento12 páginasCuestionario Fase 2Sara Giraldo de LeónAún no hay calificaciones
- Informe Leyes de MaxwellDocumento19 páginasInforme Leyes de MaxwellPIERRE ANDREAún no hay calificaciones
- Lenguaje y Procesos CognitivosDocumento13 páginasLenguaje y Procesos CognitivosClaudia AntuanetAún no hay calificaciones
- 2015 0 Acuerdo Mpal 012 PDM Guaduas PDF Original FirmadoDocumento110 páginas2015 0 Acuerdo Mpal 012 PDM Guaduas PDF Original FirmadoLuis Carlos LópezAún no hay calificaciones
- Ejercicio 4Documento8 páginasEjercicio 4Daniel LautaroAún no hay calificaciones
- GRAMÁTICA DEL CINE - GlosarioDocumento6 páginasGRAMÁTICA DEL CINE - GlosarioAna SanchezAún no hay calificaciones
- Copia de Maestro Materiales 04 07 2018 V5Documento36 páginasCopia de Maestro Materiales 04 07 2018 V5JavierAún no hay calificaciones
- Informe Psicológico Del Test de Apercepción Infantil Con Figuras AnimalesDocumento2 páginasInforme Psicológico Del Test de Apercepción Infantil Con Figuras Animalesfernando palaciosAún no hay calificaciones
- Sentencia Caso Masterpiece Cake Shop Corte Suprema Federal (Traducción de Christian Guzmán)Documento18 páginasSentencia Caso Masterpiece Cake Shop Corte Suprema Federal (Traducción de Christian Guzmán)Daniela De Fatima Pita AhumadaAún no hay calificaciones
- Tubo LED T8 Integrado DOBLE, 18W, 60cmDocumento5 páginasTubo LED T8 Integrado DOBLE, 18W, 60cmCasa Deporte BalinAún no hay calificaciones
- Determinacion Del Uso Consuntivo y Calculo de La Demanda de AguaDocumento34 páginasDeterminacion Del Uso Consuntivo y Calculo de La Demanda de AguaCesar Vasco GuerreroAún no hay calificaciones
- El Colosal 9Documento16 páginasEl Colosal 9RICARDO SARMIENTOAún no hay calificaciones
- Mision Vision Valores CompartidosDocumento40 páginasMision Vision Valores CompartidosOscar Samper RoblesAún no hay calificaciones
- DireccionesDocumento4 páginasDireccionesRichard FierroAún no hay calificaciones
- Evidencia 2Documento9 páginasEvidencia 2Jorge CoutinoAún no hay calificaciones
- SV Frutas DeshidratadasDocumento9 páginasSV Frutas DeshidratadasMayherly NsAún no hay calificaciones
- Ficha D20Documento1 páginaFicha D20Giuliano MartelliAún no hay calificaciones