También podría gustarte
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDe EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Simulacion de CircuitosDocumento16 páginasSimulacion de CircuitosCristhian Felipe Luengas MoraAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Ilovepdf MergedDocumento11 páginasIlovepdf MergedCristhian Felipe Luengas MoraAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- ARDUINO Rev1Documento7 páginasARDUINO Rev1wladimir ruizAún no hay calificaciones
- 100 Circuitos de Potencia con SCRs y TriacsDe Everand100 Circuitos de Potencia con SCRs y TriacsCalificación: 3 de 5 estrellas3/5 (5)
- Trabajo en Clase ArduinoDocumento12 páginasTrabajo en Clase ArduinoΑλέξανδρος φρέατοςAún no hay calificaciones
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Practica 1Documento6 páginasPractica 1Alejandro PavónAún no hay calificaciones
- Arduino para PrincipiantesDe EverandArduino para PrincipiantesCalificación: 3.5 de 5 estrellas3.5/5 (21)
- Informe Tanque de AguaDocumento12 páginasInforme Tanque de AguaortizcondeAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- ARDUINO 1 y 2 Victor LópezDocumento17 páginasARDUINO 1 y 2 Victor LópezVictor LopezAún no hay calificaciones
- Lab N 7 Electronica DigitalDocumento7 páginasLab N 7 Electronica DigitalSan Maycol FielAún no hay calificaciones
- PR1Sis MI18ODocumento3 páginasPR1Sis MI18OLuis GilAún no hay calificaciones
- PRACTICA 3microDocumento6 páginasPRACTICA 3microGustavo Sarmiento AntonioAún no hay calificaciones
- Tarea 2 METODOLOGIADocumento5 páginasTarea 2 METODOLOGIAJesus Quispe DiazAún no hay calificaciones
- Parcial 1 2020Documento1 páginaParcial 1 2020Josue Aparicio0% (1)
- Seguidor de Lineas Arduino 2017Documento8 páginasSeguidor de Lineas Arduino 2017Jair PerezAún no hay calificaciones
- Manual de Prácticas de Circuitos Arduino SimuladosDocumento30 páginasManual de Prácticas de Circuitos Arduino Simuladosspinal07Aún no hay calificaciones
- Practica 4 Hector MartinezDocumento11 páginasPractica 4 Hector MartinezHéctor J. MartínezAún no hay calificaciones
- Test de Comunicacion Lora-Arduino v2Documento2 páginasTest de Comunicacion Lora-Arduino v2ROGER ALBERTO BENITO ESTEBANAún no hay calificaciones
- Reporte 1 SemaforoDocumento7 páginasReporte 1 SemaforoNatividad Hdez RomeroAún no hay calificaciones
- Informe Conversor ADC0808Documento4 páginasInforme Conversor ADC0808KEVIN ANDRES LEON TARAPUESAún no hay calificaciones
- Diodos SMDDocumento16 páginasDiodos SMDcristianAún no hay calificaciones
- Seguidor de Lineas Arduino Tres D Print Tech ColombiaDocumento6 páginasSeguidor de Lineas Arduino Tres D Print Tech ColombiaAlex Daniel Rueda MolinaAún no hay calificaciones
- Andreilysurbina L2Documento35 páginasAndreilysurbina L2Andreilys UrbinaAún no hay calificaciones
- Robot Velocista QTR8RCDocumento5 páginasRobot Velocista QTR8RColggerAún no hay calificaciones
- Prácticario Electronica Digital 2018ADocumento11 páginasPrácticario Electronica Digital 2018AUlises Daniel ValverdeAún no hay calificaciones
- Kit Arduino 37 SensoresDocumento50 páginasKit Arduino 37 Sensoresrichard NAún no hay calificaciones
- Display 7 SegmentosDocumento7 páginasDisplay 7 SegmentosRaul ChavezAún no hay calificaciones
- L7 Programacion Arduino Parte 1 3Documento6 páginasL7 Programacion Arduino Parte 1 3Jefte Torres SilvaAún no hay calificaciones
- Temperatura Con PIC18f4550Documento4 páginasTemperatura Con PIC18f4550yahirdavid3096Aún no hay calificaciones
- Informe Carro Evasor de ObstaculosDocumento9 páginasInforme Carro Evasor de ObstaculosSofía Moreno100% (1)
- IndiceDocumento4 páginasIndicejuan pablo sanabria 2021Aún no hay calificaciones
- Informe Motor de Induccion Parte 1Documento19 páginasInforme Motor de Induccion Parte 1Cristian MolinaAún no hay calificaciones
- Práctica 3Documento6 páginasPráctica 3Julio A. PadillaAún no hay calificaciones
- Microcontrolador Dspic VoltimetroDocumento6 páginasMicrocontrolador Dspic VoltimetroChristian QCAún no hay calificaciones
- Un Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoDocumento9 páginasUn Generador de Funciones de Onda Cuadrada Simple Con Un ArduinoPierDonneeAún no hay calificaciones
- Medidor de Temperatura Con Lm335Documento12 páginasMedidor de Temperatura Con Lm335Fernando Gutierrez100% (1)
- Informe Practica 4 SDIIDocumento6 páginasInforme Practica 4 SDIIJuan Sebastian Mosquera BarahonaAún no hay calificaciones
- 1 ArduinoDocumento28 páginas1 ArduinoBilly ViteriAún no hay calificaciones
- Taller - 1 DIODOS PDFDocumento5 páginasTaller - 1 DIODOS PDFCesar Castillo ArévaloAún no hay calificaciones
- Generación de Ondas SPWM Con Arduino para La Excitación de Inversores MonofásicosDocumento4 páginasGeneración de Ondas SPWM Con Arduino para La Excitación de Inversores MonofásicosEddy Rooy100% (1)
- Reporte Practicas Entradas AnalogicasDocumento9 páginasReporte Practicas Entradas AnalogicasaleAún no hay calificaciones
- Prácticas Arduino VisualinoDocumento37 páginasPrácticas Arduino VisualinoRaúl ConradoAún no hay calificaciones
- Taller 2do ParcialDocumento4 páginasTaller 2do Parcialjuan65321Aún no hay calificaciones
- Medidor de Velocidad.Documento12 páginasMedidor de Velocidad.Omar Alfredo Garcia OrdoñezAún no hay calificaciones
- Lección 7 FotoresistorDocumento7 páginasLección 7 FotoresistorPABLO NARVAEZAún no hay calificaciones
- Guia de Ejercicios - ArduinoDocumento29 páginasGuia de Ejercicios - ArduinoCarlos Andrés100% (1)
- Práctica 2, DesfasadorDocumento5 páginasPráctica 2, Desfasadorricardobim88Aún no hay calificaciones
- Informe-Proyecto de Tacometro DigitalDocumento29 páginasInforme-Proyecto de Tacometro DigitalBrian CwAún no hay calificaciones
- Laboratorio 3 - Jaider Diez - Vanessa AguirreDocumento7 páginasLaboratorio 3 - Jaider Diez - Vanessa AguirreVanessa AguirreAún no hay calificaciones
- Circuitos Electronicos 1 - LIDocumento6 páginasCircuitos Electronicos 1 - LIRey HolguinAún no hay calificaciones
- Práctica 1 Encender 1 o Varios Led Desde Monitor SerieDocumento5 páginasPráctica 1 Encender 1 o Varios Led Desde Monitor SerieArtonatoAún no hay calificaciones
- Informe Del Laboratorio # 4Documento10 páginasInforme Del Laboratorio # 4Rafael BejaranoAún no hay calificaciones
- Tutorial para PIC de 8 PinesDocumento132 páginasTutorial para PIC de 8 PinesFelipe Perez100% (1)
- Ejercicios ArduinoDocumento26 páginasEjercicios ArduinoEDITOR100% (1)
- PROYECTODocumento11 páginasPROYECTORaul Depaz NuñezAún no hay calificaciones
- Tesis Comport. Del Acero Estructural en Colombia PDFDocumento316 páginasTesis Comport. Del Acero Estructural en Colombia PDFfreddy.sucuytanaAún no hay calificaciones
- Imágenes de SimuladorDocumento5 páginasImágenes de SimuladorCristhian Felipe Luengas MoraAún no hay calificaciones
- Ilovepdf MergedDocumento11 páginasIlovepdf MergedCristhian Felipe Luengas MoraAún no hay calificaciones
- Actividad - 2 - Costos SaludDocumento4 páginasActividad - 2 - Costos SaludCristhian Felipe Luengas Mora33% (3)
- Certificacion LaboralDocumento2 páginasCertificacion LaboralCristhian Felipe Luengas MoraAún no hay calificaciones
- INFORMEDocumento15 páginasINFORMECristhian Felipe Luengas MoraAún no hay calificaciones
- Texto UnoDocumento68 páginasTexto UnoCristhian Felipe Luengas MoraAún no hay calificaciones
- Gris y Azul Ilustración Habilidad de Dibujo A Mano de Mapas Infografía de EducaciónDocumento2 páginasGris y Azul Ilustración Habilidad de Dibujo A Mano de Mapas Infografía de EducaciónCristhian Felipe Luengas MoraAún no hay calificaciones
- Informe Gestión de Recaudo Y Cobranza Marzo 2023: Panamá Colombia MéxicoDocumento18 páginasInforme Gestión de Recaudo Y Cobranza Marzo 2023: Panamá Colombia MéxicoCristhian Felipe Luengas MoraAún no hay calificaciones
- Proyecto Final de Fundamentos 2Documento5 páginasProyecto Final de Fundamentos 2Cristhian Felipe Luengas MoraAún no hay calificaciones
- Tesis Maestra MCMAIDocumento188 páginasTesis Maestra MCMAICristhian Felipe Luengas MoraAún no hay calificaciones
- Derivada 3Documento3 páginasDerivada 3Cristhian Felipe Luengas MoraAún no hay calificaciones
- Abril 11 Entregar DOMINGO 17 de Abril-Uni2 - Act1 - Tall - Sob - DeriDocumento6 páginasAbril 11 Entregar DOMINGO 17 de Abril-Uni2 - Act1 - Tall - Sob - DeriCristhian Felipe Luengas Mora100% (1)
- Taller 4 CienciasDocumento3 páginasTaller 4 CienciasCristhian Felipe Luengas MoraAún no hay calificaciones
- Apuntes 10Documento8 páginasApuntes 10Cristhian Felipe Luengas MoraAún no hay calificaciones
- Teorema Del Valor MedioDocumento3 páginasTeorema Del Valor MedioCristhian Felipe Luengas MoraAún no hay calificaciones
- Talleres SucesionesDocumento4 páginasTalleres SucesionesCristhian Felipe Luengas MoraAún no hay calificaciones
- Taller Edufit Calculo DiferencialDocumento3 páginasTaller Edufit Calculo DiferencialCristhian Felipe Luengas MoraAún no hay calificaciones
- Taller Edufit Calculo DiferencialDocumento3 páginasTaller Edufit Calculo DiferencialCristhian Felipe Luengas MoraAún no hay calificaciones
- Taller de Probabilidad 2022-02Documento10 páginasTaller de Probabilidad 2022-02Cristhian Felipe Luengas MoraAún no hay calificaciones
- Actividades Corte de Dos de LinealDocumento6 páginasActividades Corte de Dos de LinealCristhian Felipe Luengas MoraAún no hay calificaciones
- Taller 6Documento4 páginasTaller 6Cristhian Felipe Luengas MoraAún no hay calificaciones
- AnalisisDocumento6 páginasAnalisisCristhian Felipe Luengas MoraAún no hay calificaciones
- AnalisisDocumento6 páginasAnalisisCristhian Felipe Luengas MoraAún no hay calificaciones
- Analisis 2Documento1 páginaAnalisis 2Cristhian Felipe Luengas MoraAún no hay calificaciones
- Universidad Distrital Francisco Jose de Caldas Cálculo Diferencial Facultad TecnologicaDocumento2 páginasUniversidad Distrital Francisco Jose de Caldas Cálculo Diferencial Facultad TecnologicaCristhian Felipe Luengas MoraAún no hay calificaciones
- Parcial 1Documento3 páginasParcial 1Cristhian Felipe Luengas MoraAún no hay calificaciones
- Guia Del Usuario 3.5Documento26 páginasGuia Del Usuario 3.5Fernando Reynoso MagalloniAún no hay calificaciones
- Habilitacion Variable ComplejaDocumento1 páginaHabilitacion Variable ComplejaEDUART ARLEY MEDINA AGUIRREAún no hay calificaciones
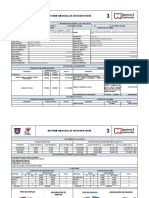
- Informe Mensual I.E. No. 3 - JDJ..Documento11 páginasInforme Mensual I.E. No. 3 - JDJ..ANGELA ZAMBRANOAún no hay calificaciones
- Primera Entrega Del Trabajo Final-Grupo 7Documento8 páginasPrimera Entrega Del Trabajo Final-Grupo 7Christian Romero PeñafielAún no hay calificaciones
- Informe Tipos de Mantenimiento. Auditoria de SistemasDocumento5 páginasInforme Tipos de Mantenimiento. Auditoria de SistemasJhon Alejandro Esáa ArnaízAún no hay calificaciones
- 1.-Elaboramos Un Afiche Sobre El Uso Responsable Del Teléfono CelularDocumento3 páginas1.-Elaboramos Un Afiche Sobre El Uso Responsable Del Teléfono Celularbety nancy heras ferrerAún no hay calificaciones
- 34 Libros para Aprender Chino Mandarín (PDF) ¡Gratis!Documento12 páginas34 Libros para Aprender Chino Mandarín (PDF) ¡Gratis!Leydy RamosAún no hay calificaciones
- Applications With Azure Cloud and Windows Containers (Ebook) Es EsDocumento75 páginasApplications With Azure Cloud and Windows Containers (Ebook) Es EsJavier GuerreroAún no hay calificaciones
- Rivalidad Entre CompetidoresDocumento2 páginasRivalidad Entre CompetidoresJULYGARCIA23Aún no hay calificaciones
- Guía Semanal Celulares Telcel Semana 1Documento11 páginasGuía Semanal Celulares Telcel Semana 1TonyMVAún no hay calificaciones
- Electrónica 3. ActividadDocumento2 páginasElectrónica 3. Actividadsaul ochoaAún no hay calificaciones
- Arco OxigenoDocumento4 páginasArco OxigenoErickcarlos Lucas NinaAún no hay calificaciones
- Plantilla PetzlDocumento4 páginasPlantilla PetzlGustavo Carrasco100% (1)
- Anclas Mecanicas TerminatorDocumento2 páginasAnclas Mecanicas TerminatorjacquelineAún no hay calificaciones
- Manual contrAA 300 ES 2011-01Documento68 páginasManual contrAA 300 ES 2011-01ELIANA BURGOSAún no hay calificaciones
- Manual Técnico NeumoventDocumento74 páginasManual Técnico NeumoventCRISTIAN FERNANDO ROMERO SANCHEZ50% (2)
- Canales y Frecuencias Marinas de VHF PDFDocumento3 páginasCanales y Frecuencias Marinas de VHF PDFLuis CedilloAún no hay calificaciones
- LISTA DE PRECIOS Imprimir.3Documento17 páginasLISTA DE PRECIOS Imprimir.3A. Jose Sierra MendozaAún no hay calificaciones
- Beneficios Del Uso de Es Sistema de Llenado AutomáticoDocumento3 páginasBeneficios Del Uso de Es Sistema de Llenado AutomáticoFaby Sierra100% (1)
- Geominas 89Documento76 páginasGeominas 89GEOMINASAún no hay calificaciones
- Videoclase Gerencia de Operaciones, Semana 2. DAHH BlendedDocumento27 páginasVideoclase Gerencia de Operaciones, Semana 2. DAHH BlendedJERSIN JULINHO ZEVALLOS ARZAPALOAún no hay calificaciones
- La Ti y Las Ventajas CompetitivasDocumento14 páginasLa Ti y Las Ventajas CompetitivasLUCERO MELINA COSME INOCENTEAún no hay calificaciones
- Cuestionario Generalidades de AuditoriaDocumento3 páginasCuestionario Generalidades de AuditoriaCarlosArturoBlandonJaramilloAún no hay calificaciones
- METRADOSDocumento14 páginasMETRADOSMichel DCAún no hay calificaciones
- Manual de Usuario: WWW - Viceroysmartpro.EsDocumento13 páginasManual de Usuario: WWW - Viceroysmartpro.Esjules.motttteAún no hay calificaciones
- Revista Finanz@s 24Documento52 páginasRevista Finanz@s 24pol velizAún no hay calificaciones
- Apuntes Del Mètodo de La Ruta Critica (Pert)Documento8 páginasApuntes Del Mètodo de La Ruta Critica (Pert)Carlos HernandezAún no hay calificaciones
- FlushingterDocumento5 páginasFlushingterRoberto GómezAún no hay calificaciones
- El Correo Electrónico y Sus AplicacionesDocumento10 páginasEl Correo Electrónico y Sus AplicacionesAdrian Garcia SarabiaAún no hay calificaciones
- Laboratorio de AbrasionDocumento11 páginasLaboratorio de AbrasionSudaydaAún no hay calificaciones