También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Partes Del MicroscopioDocumento6 páginasPartes Del MicroscopioCarmen MartinezAún no hay calificaciones
- Ejercicios Resueltos Interpolacion PolinomialDocumento6 páginasEjercicios Resueltos Interpolacion Polinomialprofe.alex78% (18)
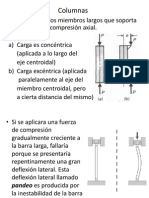
- ColumnasDocumento51 páginasColumnasmarioreyescardenas100% (1)
- ¡Qué Divertido! 5° SolucionarioDocumento175 páginas¡Qué Divertido! 5° SolucionarioElizabeth Hinojosa López86% (7)
- Practica 10. Muestreo de AceptaciónDocumento13 páginasPractica 10. Muestreo de AceptaciónDelfido Pirir100% (1)
- Propiedades Visuales 07Documento2 páginasPropiedades Visuales 07Bkn Wear Importaciones100% (1)
- Trabajo Metodologia Alfa de CronbachDocumento17 páginasTrabajo Metodologia Alfa de CronbachyennysAún no hay calificaciones
- Serie de Calculo IntegralDocumento47 páginasSerie de Calculo IntegralTraceur Carlos M. NAún no hay calificaciones
- PerezJuarez Antonio M18S4PIDocumento9 páginasPerezJuarez Antonio M18S4PIMario Yesn'tAún no hay calificaciones
- Comparando A Los Numeros Naturales para Primero de PrimariaDocumento4 páginasComparando A Los Numeros Naturales para Primero de PrimariaPILARAún no hay calificaciones
- Parcial Cálculo NuméricoDocumento22 páginasParcial Cálculo NuméricoJean ArandiaAún no hay calificaciones
- Practica de Matematica AvanzadaDocumento9 páginasPractica de Matematica AvanzadaDeam AlvaAún no hay calificaciones
- Actividad 4 Consolidado.Documento38 páginasActividad 4 Consolidado.NOELAún no hay calificaciones
- Consolidado Métodos Numéricos - Natalia Laserna - CristianPerezDocumento7 páginasConsolidado Métodos Numéricos - Natalia Laserna - CristianPerezCristian perezAún no hay calificaciones
- Tarea - 1 - Calculo DiferencialDocumento27 páginasTarea - 1 - Calculo DiferencialSebastian CorreaAún no hay calificaciones
- Recuperacion Actividad 1Documento11 páginasRecuperacion Actividad 1juan menesesAún no hay calificaciones
- Derivada Implicita - PrácticaDocumento4 páginasDerivada Implicita - PrácticaDylan RengifoAún no hay calificaciones
- Consolidado Métodos Numéricos - Natalia Laserna - CristianPerezDocumento7 páginasConsolidado Métodos Numéricos - Natalia Laserna - CristianPerezCristian perezAún no hay calificaciones
- Ejercicios eDocumento11 páginasEjercicios eHaiberAún no hay calificaciones
- TAREA 3 - Unidad 2 Calculo DiferencialDocumento12 páginasTAREA 3 - Unidad 2 Calculo DiferencialLaura RoperoAún no hay calificaciones
- Trabajo Colaborativo Tarea 3 CalculoDocumento30 páginasTrabajo Colaborativo Tarea 3 CalculoJENNY PEREZAún no hay calificaciones
- Tarea 3 - CalculoDocumento12 páginasTarea 3 - CalculoAngela AlvarezAún no hay calificaciones
- Tarea 2. AproximacionesDocumento4 páginasTarea 2. AproximacionesManuel PadillaAún no hay calificaciones
- Folleto Calculo de Una VariableDocumento28 páginasFolleto Calculo de Una VariableStefanoBrionesAún no hay calificaciones
- Tarea 1-Daniela Victoria DelgadoDocumento9 páginasTarea 1-Daniela Victoria DelgadoYesica Maria Calderon CastañedaAún no hay calificaciones
- Metodos Numericos: Capitulo 1 - Parte 2 Solucion de Ecuaciones ImplicitasDocumento28 páginasMetodos Numericos: Capitulo 1 - Parte 2 Solucion de Ecuaciones ImplicitasAyrton Flores SantosAún no hay calificaciones
- ACTIVIDAD FINAL - Calculo San MateoDocumento6 páginasACTIVIDAD FINAL - Calculo San MateoJaider MaciasAún no hay calificaciones
- Estudiante 4 WILLIAM - TAVERADocumento15 páginasEstudiante 4 WILLIAM - TAVERAWilliam Tavera QuirozAún no hay calificaciones
- Laboratorio de Polinomios de InterpolaciónDocumento5 páginasLaboratorio de Polinomios de InterpolaciónOscar GuaricalloAún no hay calificaciones
- Ejercicios 3, 7 y 11Documento17 páginasEjercicios 3, 7 y 11Dayanna Barrios CaicedoAún no hay calificaciones
- Tarea. DerivadasDocumento11 páginasTarea. DerivadasMaria Isabel Castro SilvaAún no hay calificaciones
- ACTIVIDAD No. 9. Maximos, Minimos, AplicacionesDocumento13 páginasACTIVIDAD No. 9. Maximos, Minimos, AplicacionesGina BotinaAún no hay calificaciones
- Unidad 1 - Tarea 1 - Jenifer Julieth CampoDocumento13 páginasUnidad 1 - Tarea 1 - Jenifer Julieth CampoDANIELA GUEVARAAún no hay calificaciones
- Actividad TaylorDocumento4 páginasActividad Taylorsantiago acevedoAún no hay calificaciones
- Dcin Ea U3 JagcDocumento7 páginasDcin Ea U3 JagcyafetAún no hay calificaciones
- Cálculo IntegralDocumento22 páginasCálculo Integralivan jose jimenezAún no hay calificaciones
- Actividad Ecuaciones Diferenciales Unidad TresDocumento7 páginasActividad Ecuaciones Diferenciales Unidad TresRodrigo HernandezAún no hay calificaciones
- Examenes Calculo Cursos AnterioresDocumento68 páginasExamenes Calculo Cursos AnterioresCarlos MotosAún no hay calificaciones
- Ejercicios Resueltos de Calculo de DerivadasDocumento7 páginasEjercicios Resueltos de Calculo de DerivadasAgustin Asensio TruccoAún no hay calificaciones
- Integrales-Winston SalazarDocumento11 páginasIntegrales-Winston Salazarwinston salazarAún no hay calificaciones
- Metodos de InterpolacionDocumento7 páginasMetodos de InterpolacionMarco Antonio Alanoca ChoqueAún no hay calificaciones
- Unidad 3 - ColaborativoDocumento41 páginasUnidad 3 - ColaborativoLorena Prada PeñaAún no hay calificaciones
- Tarea 3 - DerivadasDocumento7 páginasTarea 3 - DerivadasSandra Milena diazAún no hay calificaciones
- Andres Avila IntegralesDocumento8 páginasAndres Avila IntegralesArgelio Arias SanchezAún no hay calificaciones
- Tarea 3 Estudiante 2 Karen Lara Gallego.Documento11 páginasTarea 3 Estudiante 2 Karen Lara Gallego.Jorge Luis CaceresAún no hay calificaciones
- Calculo CPMXDocumento11 páginasCalculo CPMXvictor moralesAún no hay calificaciones
- Act 2 Calculo Integral Luis Gael Lopez SalazarDocumento7 páginasAct 2 Calculo Integral Luis Gael Lopez SalazarDylan LópezAún no hay calificaciones
- Liliana Zuleta 30Documento6 páginasLiliana Zuleta 30Sergio Leonardo Sánchez MéndezAún no hay calificaciones
- UNIDAD I 1ra ParteDocumento8 páginasUNIDAD I 1ra Parteveracruz266Aún no hay calificaciones
- Junio - Álgebra - 5toDocumento17 páginasJunio - Álgebra - 5toAnonymous 7za15o0Aún no hay calificaciones
- Tarea 1. El Concepto de Integral - Grupo - 30Documento30 páginasTarea 1. El Concepto de Integral - Grupo - 30Viviana SagastuyAún no hay calificaciones
- Paso - 2 - Calculo IntegralDocumento14 páginasPaso - 2 - Calculo IntegraldaniloAún no hay calificaciones
- Polinomios Cuarto PDFDocumento30 páginasPolinomios Cuarto PDFFuentes Anaya HenryAún no hay calificaciones
- Factorización y PolinomiosDocumento8 páginasFactorización y PolinomiosElvis HermesAún no hay calificaciones
- Calculo 1-2-3-4 (1) JoseDocumento16 páginasCalculo 1-2-3-4 (1) JoseJose David De AvilaAún no hay calificaciones
- Cin U2 A2 RommDocumento6 páginasCin U2 A2 Rommrosalinda martinezAún no hay calificaciones
- Castiblanco John Calculo de Derivadas Taller Semana 4Documento47 páginasCastiblanco John Calculo de Derivadas Taller Semana 4John CastiblancoAún no hay calificaciones
- Eliana Reyes - Tares 4Documento20 páginasEliana Reyes - Tares 4Eliana ReyesAún no hay calificaciones
- Cristian Te Amo No Me Quiere CuliarDocumento7 páginasCristian Te Amo No Me Quiere CuliarZharick ReyesAún no hay calificaciones
- 01deberes Sobre Límites-1Documento8 páginas01deberes Sobre Límites-1Lizbeth CumbalAún no hay calificaciones
- Radicales y RacionalizaciónDocumento4 páginasRadicales y RacionalizaciónkinjattAún no hay calificaciones
- Tarea 1 Ejercicios C Juan Londoño ConsolidadoDocumento10 páginasTarea 1 Ejercicios C Juan Londoño Consolidadojuan carlos londoño rodriguezAún no hay calificaciones
- Sergio Rodrigo Carcamo ObandoDocumento6 páginasSergio Rodrigo Carcamo ObandoSergio Rodrigo Cárcamo ObandoAún no hay calificaciones
- Presentación Momento-CurvaturaDocumento45 páginasPresentación Momento-CurvaturaJean ArandiaAún no hay calificaciones
- Examples 1D-2DDocumento51 páginasExamples 1D-2DJean ArandiaAún no hay calificaciones
- Vigas y MarcosDocumento12 páginasVigas y MarcosJean ArandiaAún no hay calificaciones
- PortafolioDocumento48 páginasPortafolioJean ArandiaAún no hay calificaciones
- Período Fundamental VibraciónDocumento5 páginasPeríodo Fundamental VibraciónJean ArandiaAún no hay calificaciones
- Placas Apoyo Vigas y Bases ColumnasDocumento10 páginasPlacas Apoyo Vigas y Bases ColumnasJean ArandiaAún no hay calificaciones
- 2.-Aspectos Generales Del AceroDocumento32 páginas2.-Aspectos Generales Del AceroJean ArandiaAún no hay calificaciones
- Pensum Tec Proce Quimi IndusDocumento1 páginaPensum Tec Proce Quimi IndusYulith MurilloAún no hay calificaciones
- Polinomios Álgebra Pre UniversitariaDocumento2 páginasPolinomios Álgebra Pre UniversitariaNeheyler Mecatrónico100% (1)
- Canaleta y Camara de Aquietamiento y DosificacionDocumento28 páginasCanaleta y Camara de Aquietamiento y DosificacionSebastian RiquettAún no hay calificaciones
- Teoría de Colas: Modelos en AdministraciónDocumento34 páginasTeoría de Colas: Modelos en Administraciónjuan jose martinezAún no hay calificaciones
- SCD Lab1 - Puma - 2019aDocumento42 páginasSCD Lab1 - Puma - 2019aJano Jesus AlexAún no hay calificaciones
- Analisis de ContenidoDocumento7 páginasAnalisis de ContenidoMa Magdalena DAún no hay calificaciones
- Ah 1996Documento194 páginasAh 1996Anonymous VrZv0QAAún no hay calificaciones
- Estadistica p4 PDFDocumento17 páginasEstadistica p4 PDFDanny Marcelo Tomichá0% (1)
- Flujograma Is 2011 Aprobado CADocumento1 páginaFlujograma Is 2011 Aprobado CARicardo GerstlAún no hay calificaciones
- ESTADISTICAXDDocumento11 páginasESTADISTICAXDasdfAún no hay calificaciones
- Saber Ver La ArquitecturaDocumento9 páginasSaber Ver La ArquitecturabssbsAún no hay calificaciones
- Guion Metodo MatematicoDocumento5 páginasGuion Metodo MatematicoEnrique Rosario GuerreroAún no hay calificaciones
- Origin of Angiosperms - Evidencia Fósil y Molecular-2012.en - EsDocumento29 páginasOrigin of Angiosperms - Evidencia Fósil y Molecular-2012.en - EsVerito BermAún no hay calificaciones
- Ejercicios de Estadisica 4 Eavaluacion PDFDocumento24 páginasEjercicios de Estadisica 4 Eavaluacion PDFwilbert pinedaAún no hay calificaciones
- CURSO ECO069 Consultoria A Empresas Rurales, ECO0069 - RESUMENDocumento155 páginasCURSO ECO069 Consultoria A Empresas Rurales, ECO0069 - RESUMENanmara19548649100% (3)
- Diapositiva Sesion 7 2023-IDocumento57 páginasDiapositiva Sesion 7 2023-Ijoseluis0482Aún no hay calificaciones
- Lamina #6-A3Documento1 páginaLamina #6-A3Yeremy CerasAún no hay calificaciones
- Guias de Aprendizaje Matematicas 4º PDFDocumento29 páginasGuias de Aprendizaje Matematicas 4º PDFGinna Fernanda CUBILLOS GONZALEZAún no hay calificaciones
- Fuerza de RoceDocumento3 páginasFuerza de RocedanielaAún no hay calificaciones
- Guia de Diseño de La Calidad - QFD JLDocumento105 páginasGuia de Diseño de La Calidad - QFD JLJeison LombeidaAún no hay calificaciones
- 1.-Analisis Preliminar de RiesgosDocumento24 páginas1.-Analisis Preliminar de RiesgosGabriel Fernandez100% (1)
- Palabras Reservadas de CDocumento10 páginasPalabras Reservadas de CMariaCristinaJarquinQuirozAún no hay calificaciones
- Producto VectorialDocumento5 páginasProducto VectorialRodrigo Gutierrez ChavezAún no hay calificaciones