También podría gustarte
- Un Trozo de Alambre de FT L de Longitud Se Corta en Tres PartesDocumento9 páginasUn Trozo de Alambre de FT L de Longitud Se Corta en Tres PartesJuan Pablo Urquijo Sanchez67% (3)
- 102 - Diversidad Cultural Del Estado Upav IDocumento3 páginas102 - Diversidad Cultural Del Estado Upav Ikatalina100% (7)
- Temario Procesos Sanitarios Tema 2Documento47 páginasTemario Procesos Sanitarios Tema 2Xanecouboi XikiAún no hay calificaciones
- Área en Coordenadas PolaresDocumento12 páginasÁrea en Coordenadas PolaresMaikol Alexander100% (1)
- Final 2019 MayoDocumento3 páginasFinal 2019 Mayofacundoacevedo460Aún no hay calificaciones
- FinalJulio2019 (1erllamado)Documento2 páginasFinalJulio2019 (1erllamado)facundoacevedo460Aún no hay calificaciones
- FinalDic 19 (2dollamado)Documento4 páginasFinalDic 19 (2dollamado)Luciano LuqueAún no hay calificaciones
- Examen 140723Documento4 páginasExamen 140723Seba smithAún no hay calificaciones
- Seminario - Grupo 5Documento13 páginasSeminario - Grupo 5FRANK JESUS ROJAS GUTIERREZAún no hay calificaciones
- Coord PolaresDocumento13 páginasCoord PolaresJonathan RuedaAún no hay calificaciones
- 2019 - 12 - Solucion - ExamenDocumento4 páginas2019 - 12 - Solucion - ExamenSebastian AlvezAún no hay calificaciones
- Examen Matematicas L GITI UPV FINAL SEGUNDO PARCIAL 2023Documento4 páginasExamen Matematicas L GITI UPV FINAL SEGUNDO PARCIAL 2023Marc TRVLAún no hay calificaciones
- PC4-Turno 1 - Solucià NDocumento4 páginasPC4-Turno 1 - Solucià Ng24ygv4pm4Aún no hay calificaciones
- 2019 - 07 - Letra - ExamenDocumento4 páginas2019 - 07 - Letra - ExamenSebastian Alvez100% (1)
- Parcial 2 02-22Documento6 páginasParcial 2 02-22Sebastián PabuenaAún no hay calificaciones
- Precertamen 1 PautaDocumento11 páginasPrecertamen 1 PautaGaspar SilvaAún no hay calificaciones
- Integrales DoblesDocumento15 páginasIntegrales DoblesCarmen Rosa FloresAún no hay calificaciones
- HojaEjercicios Vectorial13 SolDocumento9 páginasHojaEjercicios Vectorial13 SolCami TotoyAún no hay calificaciones
- Segundo Parcial 240623 (2) - SolucionDocumento9 páginasSegundo Parcial 240623 (2) - SolucionSONY ETCHEVERRYAún no hay calificaciones
- Evaluaciones Resueltas Cálculo Vectorial 2019A EPNDocumento30 páginasEvaluaciones Resueltas Cálculo Vectorial 2019A EPNKAGGHGAún no hay calificaciones
- Pauta de Prueba 2 MMAT702Documento3 páginasPauta de Prueba 2 MMAT702Sebastian Espinoza CejasAún no hay calificaciones
- Febrero Resuelto-1Documento5 páginasFebrero Resuelto-1Jorge MorielAún no hay calificaciones
- Taller 2 (No Evaluable)Documento3 páginasTaller 2 (No Evaluable)Maria Amelia Melo RualesAún no hay calificaciones
- 4122 Superficies ParametrizadasDocumento23 páginas4122 Superficies ParametrizadasJonathan López RuízAún no hay calificaciones
- Ejercicios ALDocumento1 páginaEjercicios ALNicolás Rodríguez WeldtAún no hay calificaciones
- I1 2305 PautaDocumento4 páginasI1 2305 PautaDesorter DsrAún no hay calificaciones
- Examen 11 MayobDocumento4 páginasExamen 11 MayobIvan Prieto OlivaAún no hay calificaciones
- PC2 BMA03 2021.2 SoluDocumento3 páginasPC2 BMA03 2021.2 SoluIVAN ESTEBAN PRUDENCIO RAMOSAún no hay calificaciones
- Ejercicios A 1 2Documento3 páginasEjercicios A 1 2javier correaAún no hay calificaciones
- 2020 - 02 - Letra - ExamenDocumento4 páginas2020 - 02 - Letra - ExamenSebastian AlvezAún no hay calificaciones
- EE1920Parte2 SolucionDocumento5 páginasEE1920Parte2 SolucionCesar Daniel Padilla GonzalezAún no hay calificaciones
- Solucionario de La Practica 2 2019 - IDocumento4 páginasSolucionario de La Practica 2 2019 - IAlex Cabrera LázaroAún no hay calificaciones
- Prueba1 CV 2019A SoluciónDocumento4 páginasPrueba1 CV 2019A SoluciónRugeth CastilloAún no hay calificaciones
- Taller 3 - Álgebra LinealDocumento2 páginasTaller 3 - Álgebra LinealsavilaqAún no hay calificaciones
- Capítulos 9 y 10Documento3 páginasCapítulos 9 y 10Alicia EspinolaAún no hay calificaciones
- Clase 12-Indicaciones PDFDocumento5 páginasClase 12-Indicaciones PDFOneal RosalesAún no hay calificaciones
- Soluciones PrimerParBII2021Documento4 páginasSoluciones PrimerParBII2021ROXANA CASTILLO MAMANIAún no hay calificaciones
- Sol PEC 2 2024Documento3 páginasSol PEC 2 2024OroroAún no hay calificaciones
- Algebra Lineal-FINAL-2019-2Documento3 páginasAlgebra Lineal-FINAL-2019-2Legión Espartana :vAún no hay calificaciones
- Ejercicios Mat102Documento11 páginasEjercicios Mat102Brian VelaAún no hay calificaciones
- PC1 Igd 2022BDocumento1 páginaPC1 Igd 2022BShuller OlivaresAún no hay calificaciones
- Taller 10-2019IDocumento2 páginasTaller 10-2019IAnálisis UnseAún no hay calificaciones
- Compendio 1 Puntos y VectoresDocumento7 páginasCompendio 1 Puntos y VectoresFrancisco Abarzúa VallejosAún no hay calificaciones
- PAIEP Areas Longitud Polar APT 2019Documento11 páginasPAIEP Areas Longitud Polar APT 2019celina lopezAún no hay calificaciones
- GEOMETRIA2Documento4 páginasGEOMETRIA2Lorena Del Coz RodríguezAún no hay calificaciones
- 10-11-18 Parcial Algebra 2Documento4 páginas10-11-18 Parcial Algebra 2Naiara Estefanía NaveiraAún no hay calificaciones
- Erick - Vazquez - ACTIVIDAD 2 - Algebra LinealDocumento14 páginasErick - Vazquez - ACTIVIDAD 2 - Algebra LinealErick VázquezAún no hay calificaciones
- Stokes y Gauss Apuntes Nc-1Documento10 páginasStokes y Gauss Apuntes Nc-1Johao DoradoAún no hay calificaciones
- Tarea 1Documento9 páginasTarea 1David Alva TenorioAún no hay calificaciones
- Taller #7Documento2 páginasTaller #7anon_687397226Aún no hay calificaciones
- Complejos DistanciaDocumento10 páginasComplejos DistanciaEmiliano NavarroAún no hay calificaciones
- Clase 14 Y15 Cal2 2018-2Documento14 páginasClase 14 Y15 Cal2 2018-2OrlandoPerezValenciaAún no hay calificaciones
- Taller 5 (Final)Documento6 páginasTaller 5 (Final)lina maria abello quirogaAún no hay calificaciones
- Solu MañanaDocumento9 páginasSolu Mañanajuan carlosAún no hay calificaciones
- I2 Mat1630 2023Documento5 páginasI2 Mat1630 2023javierAún no hay calificaciones
- Clase 4 Modelado Con Transformada de Laplace Parte 2 PDFDocumento29 páginasClase 4 Modelado Con Transformada de Laplace Parte 2 PDFJonah SolarAún no hay calificaciones
- Intersection and Sum of Subspaces EsDocumento5 páginasIntersection and Sum of Subspaces EsJorge Ganto PelaezAún no hay calificaciones
- (ER) Pauta - Recuperacion - Trimestre3 - 2017Documento5 páginas(ER) Pauta - Recuperacion - Trimestre3 - 2017Natalia ContrerasAún no hay calificaciones
- Introducción Al Cálculo Vectorial.Documento7 páginasIntroducción Al Cálculo Vectorial.VíctorAún no hay calificaciones
- c4 p2 SolDocumento3 páginasc4 p2 SolCarlos CastroAún no hay calificaciones
- Numeros Primos y CompuestosDocumento4 páginasNumeros Primos y CompuestosErickRojasAún no hay calificaciones
- Histología Del EstómagoDocumento6 páginasHistología Del EstómagoErnesto GarciaAún no hay calificaciones
- MSDS Lubrax Industrial SH-... - ADDocumento7 páginasMSDS Lubrax Industrial SH-... - ADCAGERIGOAún no hay calificaciones
- Quishpe Mireya Practica4Documento9 páginasQuishpe Mireya Practica4MIREYA MISHELL QUISHPE QUISHPEAún no hay calificaciones
- Quimica Organica 2022Documento50 páginasQuimica Organica 2022José Rodrigo Asturias GodoyAún no hay calificaciones
- Exp 75-2020-0Documento16 páginasExp 75-2020-0Ruben Antonio Salazar CoralAún no hay calificaciones
- Documento Bebidas AchocolatadasDocumento5 páginasDocumento Bebidas Achocolatadasangie ruizAún no hay calificaciones
- Pip Mejoramiento Capacidad Operativa de MaquinariaDocumento114 páginasPip Mejoramiento Capacidad Operativa de MaquinariaJames ChongAún no hay calificaciones
- Ejercicios de Costos Por AbsorciónDocumento15 páginasEjercicios de Costos Por AbsorciónVerito BbhAún no hay calificaciones
- LA CIANOBACTERIA: Caso Lago de Atitlán, Guatemala.Documento7 páginasLA CIANOBACTERIA: Caso Lago de Atitlán, Guatemala.Csd Saprissa De Guatemala100% (2)
- Plástico Biodegradable 2Documento11 páginasPlástico Biodegradable 2BrenAún no hay calificaciones
- Gestion Educativa - Nuevo Paradigma - ResumenDocumento3 páginasGestion Educativa - Nuevo Paradigma - ResumenjaureficoAún no hay calificaciones
- Cateterismo VesicalDocumento6 páginasCateterismo VesicalShely's Sants SaliinasAún no hay calificaciones
- Ultimos 9 RegimenesDocumento8 páginasUltimos 9 RegimenesJUAN JOSE MONTENEGRO FREIREAún no hay calificaciones
- Sanación Tribal de Bloqueos Energéticos 2Documento3 páginasSanación Tribal de Bloqueos Energéticos 2EduardoAún no hay calificaciones
- Ejercicios Propuestos de Archivos de TextoDocumento2 páginasEjercicios Propuestos de Archivos de TextoLUIS ANGEL SILVA PAIRAZAMANAún no hay calificaciones
- Clockify Time Report Detailed 01 01 2023-31 12 2023Documento138 páginasClockify Time Report Detailed 01 01 2023-31 12 2023ernestoAún no hay calificaciones
- Libro CitlalliDocumento20 páginasLibro CitlalliCitlalli GAún no hay calificaciones
- Alfabetizacion Adolescentes Discapacidad IntelectualDocumento24 páginasAlfabetizacion Adolescentes Discapacidad IntelectualGraciela SanchezAún no hay calificaciones
- Plan de Desarrollo Urbano Sostenible Final Urbanismo 2 g2 2020.01Documento584 páginasPlan de Desarrollo Urbano Sostenible Final Urbanismo 2 g2 2020.01Jatnna Valentín0% (1)
- Tratamiento Tributario de Retiro de BienesDocumento50 páginasTratamiento Tributario de Retiro de BienesGiovanni Mendez EspinozaAún no hay calificaciones
- Conexión Serie Paralelo Mixto en Corriente Continua - Pre Informe 2 - Apaza Guachalla JimenaDocumento3 páginasConexión Serie Paralelo Mixto en Corriente Continua - Pre Informe 2 - Apaza Guachalla JimenaJimena Apaza GuachallaAún no hay calificaciones
- 1-74 Al 1-130 Informacion de Electricidad Y ElectronicaDocumento56 páginas1-74 Al 1-130 Informacion de Electricidad Y ElectronicaWilson ClaveriaAún no hay calificaciones
- Matematica2 Semana 12 - Dia 1 Magnitudes Proporcionales II Ccesa007Documento5 páginasMatematica2 Semana 12 - Dia 1 Magnitudes Proporcionales II Ccesa007Demetrio Ccesa Rayme100% (1)
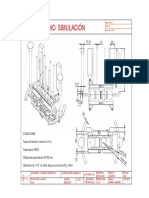
- Carter Compresor Metro Medellin Sim8Documento1 páginaCarter Compresor Metro Medellin Sim8Andres AvAún no hay calificaciones
- Lección N° 7 Plantas Con Flores y Sin FloresDocumento6 páginasLección N° 7 Plantas Con Flores y Sin FloresCarla Cecilia100% (1)
- Ejercicio Desarrollado El 06-09-2022 SeminarioDocumento6 páginasEjercicio Desarrollado El 06-09-2022 SeminarioYeimi OrellanaAún no hay calificaciones
- 1 Mercado de TrabajoDocumento15 páginas1 Mercado de TrabajoNêrithä BŠÇ100% (1)