También podría gustarte
- Estadística multivariada: inferencia y métodosDe EverandEstadística multivariada: inferencia y métodosAún no hay calificaciones
- Elementos de La Comprension Oral - DocccDocumento2 páginasElementos de La Comprension Oral - DocccAraceli Sànchez0% (1)
- Planificamos nuestro proyecto de seguridad vialDocumento213 páginasPlanificamos nuestro proyecto de seguridad vialNorma BCAún no hay calificaciones
- Aprendiendo Python OpenCVDocumento181 páginasAprendiendo Python OpenCVEdwing Maquera FloresAún no hay calificaciones
- Matlab aplicado a telecomunicacionesDe EverandMatlab aplicado a telecomunicacionesCalificación: 5 de 5 estrellas5/5 (1)
- JacobianoDocumento15 páginasJacobianoJulio CedilloAún no hay calificaciones
- Introduccion A Matlab y Simulink para Sistemas de ControlDocumento20 páginasIntroduccion A Matlab y Simulink para Sistemas de Controldaniel100% (7)
- Análisis estadístico de datos multivariadosDe EverandAnálisis estadístico de datos multivariadosCalificación: 5 de 5 estrellas5/5 (1)
- El problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónDe EverandEl problema de complementariedad No lineal: Teoría, aplicaciones y nuevos algoritmos para su soluciónAún no hay calificaciones
- Presaberes Sistemas DinamicosDocumento12 páginasPresaberes Sistemas DinamicosDiego Carranza100% (1)
- El Cerebrocentrismo PDFDocumento12 páginasEl Cerebrocentrismo PDFAlejandroValenciaAún no hay calificaciones
- Navegación Autónoma Flujo OpticoDocumento14 páginasNavegación Autónoma Flujo OpticoEdgar OvalleAún no hay calificaciones
- Proyecciones en OpenGLDocumento14 páginasProyecciones en OpenGLVerónica MendozaAún no hay calificaciones
- Tema 3. Derivadas y aplicacionesDocumento125 páginasTema 3. Derivadas y aplicacionesAxel MolinaAún no hay calificaciones
- Propuesta V3Documento12 páginasPropuesta V3mexAún no hay calificaciones
- Programación OpenGLDocumento73 páginasProgramación OpenGLEduardo Corral SotoAún no hay calificaciones
- Procesamiento Imagenes ConvolucionDocumento69 páginasProcesamiento Imagenes ConvolucionAlberto Patiño SAún no hay calificaciones
- Ingeniería de Software, ING. Sistemas.Documento40 páginasIngeniería de Software, ING. Sistemas.YeimiBMAún no hay calificaciones
- Semaforo Inteligente Con PerceptronDocumento43 páginasSemaforo Inteligente Con PerceptronDaniel PSAún no hay calificaciones
- Ejercicios ResueltosDocumento31 páginasEjercicios ResueltosMarcos Ramos0% (1)
- Reconocimiento de figuras mediante detección de contornosDocumento9 páginasReconocimiento de figuras mediante detección de contornosulises ramosAún no hay calificaciones
- Visión por computador: introducción y ejemplosDocumento147 páginasVisión por computador: introducción y ejemplosNicolásAún no hay calificaciones
- Generacion de Numeros Aleatorios PDFDocumento9 páginasGeneracion de Numeros Aleatorios PDFAnonymous k2zQoUIAún no hay calificaciones
- Tesina de Licenciatura en Ciencias de La Computación. Zanetti, ÁlvaroDocumento106 páginasTesina de Licenciatura en Ciencias de La Computación. Zanetti, Álvarozaratesugey04Aún no hay calificaciones
- 02 Cinemática Directa e Inversa.Documento10 páginas02 Cinemática Directa e Inversa.sistemaelectricoAún no hay calificaciones
- Calculo Integro Diferencial y Aplicaciones M2Documento55 páginasCalculo Integro Diferencial y Aplicaciones M2LarryGamboaPomaAún no hay calificaciones
- Modelado de sistemas no lineales con redes neuronalesDocumento20 páginasModelado de sistemas no lineales con redes neuronalesJ Alberto Vázquez RAAún no hay calificaciones
- Introducción a OpenGLDocumento57 páginasIntroducción a OpenGLsirgeorge1987Aún no hay calificaciones
- Verzani (2004) - LenguajeDocumento37 páginasVerzani (2004) - LenguajeCamilo Moncanut AntiaAún no hay calificaciones
- IRAF - Tecnicas - ExamenDocumento91 páginasIRAF - Tecnicas - ExamenaulogelioAún no hay calificaciones
- Procesamiento de Imagen en Simulink / Jean MonserrateDocumento16 páginasProcesamiento de Imagen en Simulink / Jean MonserrateJean MonserrateAún no hay calificaciones
- MAchine Learning PDFDocumento52 páginasMAchine Learning PDFAlan GonzagaAún no hay calificaciones
- Cálculo de La Dinámica Del Brazo Robótico y Reconocimiento de ImagenesDocumento35 páginasCálculo de La Dinámica Del Brazo Robótico y Reconocimiento de ImagenesRamiro rdzAún no hay calificaciones
- 02 VariabilidadDocumento20 páginas02 VariabilidadGabriela CastellanosAún no hay calificaciones
- AfinDocumento23 páginasAfinsursolidAún no hay calificaciones
- Proyecto Final Procesamiento de Imágenes DigitalesDocumento15 páginasProyecto Final Procesamiento de Imágenes DigitalesSantiago LealAún no hay calificaciones
- MorphingDocumento32 páginasMorphingPattrixxAún no hay calificaciones
- Duoc Uc Escuela de Ingeniería, Valparaíso Control Automatico de Procesos Actividad RecuperativaDocumento14 páginasDuoc Uc Escuela de Ingeniería, Valparaíso Control Automatico de Procesos Actividad Recuperativamario rojasAún no hay calificaciones
- Dibujo de escenas 3D con OpenGLDocumento15 páginasDibujo de escenas 3D con OpenGLalbert283100% (1)
- MedialdeaVillanueva TFMDocumento65 páginasMedialdeaVillanueva TFMDr. JonesAún no hay calificaciones
- PageRank Google algoritmo búsquedaDocumento21 páginasPageRank Google algoritmo búsquedaSergio TovarAún no hay calificaciones
- Generador de Graficas Con MatlabDocumento8 páginasGenerador de Graficas Con MatlabCristian YomayuzaAún no hay calificaciones
- Practica5 Represent Matricial Transform BidimensionalDocumento10 páginasPractica5 Represent Matricial Transform BidimensionalToñito MejiaAún no hay calificaciones
- MemoriaDocumento54 páginasMemoriaSusy NaranjoAún no hay calificaciones
- Guà - A Mã Dulo Cinemã¡tica 2020-2Documento5 páginasGuà - A Mã Dulo Cinemã¡tica 2020-2Diego Alejandro Moreno PedrozaAún no hay calificaciones
- Tipos de Prosesos de RenderizacionDocumento25 páginasTipos de Prosesos de RenderizacionIsamar Ines Isaura Martinez BriceñoAún no hay calificaciones
- Detección de bordes en imágenes mediante derivadas parcialesDocumento24 páginasDetección de bordes en imágenes mediante derivadas parcialesMartínez Jiménez Luis FernandoAún no hay calificaciones
- C Mputo Cient Fico II Trabajo FinalDocumento77 páginasC Mputo Cient Fico II Trabajo FinalKarolina Padilla ValdezAún no hay calificaciones
- Tutorial Simulink 3Documento231 páginasTutorial Simulink 3Gonzalo1959100% (1)
- ICC PLANTILLA CopyDocumento24 páginasICC PLANTILLA CopyMEDIOS PUBLICTARIOSAún no hay calificaciones
- Laboratorio 3 Transformaciones Geométricas AndroidDocumento9 páginasLaboratorio 3 Transformaciones Geométricas AndroidThotsuyaAún no hay calificaciones
- maxima-winedt-complementosDocumento27 páginasmaxima-winedt-complementosborjanunezasensioAún no hay calificaciones
- Transformaciones geométricas de imágenes con OpenCVDocumento12 páginasTransformaciones geométricas de imágenes con OpenCVJoel Jacob CastellanosAún no hay calificaciones
- Taller Repaso 2022-1Documento7 páginasTaller Repaso 2022-1FABIO ANDRES CARDONA JARAMILLOAún no hay calificaciones
- IA Clustering MethodsDocumento45 páginasIA Clustering MethodsjoseAún no hay calificaciones
- Guia 01 - Adquisición de ImágenesDocumento4 páginasGuia 01 - Adquisición de ImágenesPaulo Tejada BenabidesAún no hay calificaciones
- Guia Experimental de Laboratorio 5 de Fisica 1Documento2 páginasGuia Experimental de Laboratorio 5 de Fisica 1Miguel Sánchez TejadaAún no hay calificaciones
- ROI y filtro GaussianoDocumento10 páginasROI y filtro Gaussianoulises ramosAún no hay calificaciones
- Sem5 Acel Caida-Libre EnrgiaDocumento4 páginasSem5 Acel Caida-Libre EnrgiaMil SebaAún no hay calificaciones
- Importancia de las áreas funcionales en una empresaDocumento5 páginasImportancia de las áreas funcionales en una empresaDalia LazaroAún no hay calificaciones
- Carlos Mora Vanegas - A Todos Se Nos Dio Un Potencial CreativoDocumento3 páginasCarlos Mora Vanegas - A Todos Se Nos Dio Un Potencial CreativoOtiAún no hay calificaciones
- 1-Informe Examen Mental - L.M.Documento5 páginas1-Informe Examen Mental - L.M.Metakill BurmanAún no hay calificaciones
- Los Lectores Rumiantes de NietzscheDocumento2 páginasLos Lectores Rumiantes de NietzscheSAMANTHAAún no hay calificaciones
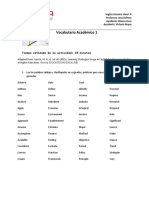
- Vocabulario Académico 1Documento2 páginasVocabulario Académico 1Camila AlcayagaAún no hay calificaciones
- Museo imágenesDocumento5 páginasMuseo imágenesjuan sebastianAún no hay calificaciones
- Diagnóstico estudiantes 5° InformáticaDocumento13 páginasDiagnóstico estudiantes 5° Informáticahelaman86100% (1)
- Modelo de Planificación de Una Sesión de Clase PFADocumento3 páginasModelo de Planificación de Una Sesión de Clase PFAECIC CapacitacionesAún no hay calificaciones
- Discapacidad SubjetividadDocumento13 páginasDiscapacidad Subjetividadangela ianniAún no hay calificaciones
- Rapport Terapeutico InfertilidadDocumento9 páginasRapport Terapeutico InfertilidadLaura Rabinad LizanoAún no hay calificaciones
- Ensayo Sobre Los Contenidos ActitudinalesDocumento2 páginasEnsayo Sobre Los Contenidos ActitudinalesJose Ramon GomezAún no hay calificaciones
- Introducción Materia Práctica Jurídica Básica Tarea 14Documento10 páginasIntroducción Materia Práctica Jurídica Básica Tarea 14petty avalosAún no hay calificaciones
- Cuestionario e Invesstigación # 6 IDocumento2 páginasCuestionario e Invesstigación # 6 IdanyAún no hay calificaciones
- Manual Del Gestor de Calidad VFDocumento28 páginasManual Del Gestor de Calidad VFPERLA IDOLINA BARRAGAN SOSAAún no hay calificaciones
- Organización General Del Sistema NerviosoDocumento28 páginasOrganización General Del Sistema NerviosoburricorneoAún no hay calificaciones
- Guía de Trabajo 1 Ciencias Sociales - Grado NovenoDocumento4 páginasGuía de Trabajo 1 Ciencias Sociales - Grado NovenoPedro J AriasAún no hay calificaciones
- 3 - Ssa - Img - Cursos - Rehabilitacion en ACV PDFDocumento29 páginas3 - Ssa - Img - Cursos - Rehabilitacion en ACV PDFJosue Guerra Cruz100% (1)
- Artículo 4 - Formación de Los Cuidadores para Transformar La Vida de Los NiñosDocumento4 páginasArtículo 4 - Formación de Los Cuidadores para Transformar La Vida de Los NiñosLuz MariaAún no hay calificaciones
- SEPTIMO BASICO MatematicaDocumento3 páginasSEPTIMO BASICO MatematicaRuby Engady Rodriguez ReyesAún no hay calificaciones
- 5 Trabajo Mapa MentalDocumento4 páginas5 Trabajo Mapa MentalMARIA JOSE REYES CARRANZAAún no hay calificaciones
- Caso Clinico Profesores 9 PDFDocumento4 páginasCaso Clinico Profesores 9 PDFWILLY VLADIMIR GONZALEZ IBARRAAún no hay calificaciones
- TRÍPTICO Introducción A La Psicología UtpDocumento2 páginasTRÍPTICO Introducción A La Psicología UtpTatakae Tatakae0% (1)
- Unidad IV Interoperabilidad EntreDocumento45 páginasUnidad IV Interoperabilidad EntreIsmae LizMaick Cepeda MoralesAún no hay calificaciones
- Tareas ResumenDocumento3 páginasTareas ResumenGustavo Isaza ZapataAún no hay calificaciones
- 06 13junio Om 222 2023 Agebre Orientaciones Evaluacion Medio TerminoDocumento7 páginas06 13junio Om 222 2023 Agebre Orientaciones Evaluacion Medio TerminoGiovanna Sandoval SalinasAún no hay calificaciones
- Pre ProyectoDocumento19 páginasPre Proyectoesperanza89Aún no hay calificaciones
- Respuestas de Saberes Previos Unidad 5Documento9 páginasRespuestas de Saberes Previos Unidad 5MariaMilagroAún no hay calificaciones