También podría gustarte
- Metodología Basada en La Norma VDI 2206Documento3 páginasMetodología Basada en La Norma VDI 2206Carlos AlbanAún no hay calificaciones
- tr1 Robotica Industrial SenatiDocumento16 páginastr1 Robotica Industrial Senatimaycol mamani huillaca100% (1)
- UF1470 - Administración y monitorización de los SGBD instaladosDe EverandUF1470 - Administración y monitorización de los SGBD instaladosAún no hay calificaciones
- Inte Iso 9241-171 2019Documento101 páginasInte Iso 9241-171 2019Kaycr426Aún no hay calificaciones
- Resumen de La Norma ISO 10218Documento14 páginasResumen de La Norma ISO 10218kevinAún no hay calificaciones
- Diagrama de Carril Swimlane MapDocumento21 páginasDiagrama de Carril Swimlane MapFernando TarinAún no hay calificaciones
- Cuestionario de Robótica PDFDocumento17 páginasCuestionario de Robótica PDFIsrael Bonilla50% (4)
- Guia CirosDocumento91 páginasGuia CirosHéctor PeñaAún no hay calificaciones
- Dimensionar, instalar y optimizar el hardware. IFCT0510De EverandDimensionar, instalar y optimizar el hardware. IFCT0510Aún no hay calificaciones
- Robótica Industrial FunciónDocumento8 páginasRobótica Industrial FunciónJorge Elias Moscoso SanchezAún no hay calificaciones
- Informe N°1 RoboticaDocumento15 páginasInforme N°1 RoboticaEduardo QuistanAún no hay calificaciones
- Capitulo 2Documento17 páginasCapitulo 2Félix MosquedaAún no hay calificaciones
- Diseño y Control de Una Celula RobotizadaDocumento9 páginasDiseño y Control de Una Celula RobotizadaMisael Miguel Matos DíazAún no hay calificaciones
- 3 - El Sistema RobóticoDocumento6 páginas3 - El Sistema RobóticoRodrigo Loz67% (3)
- Robots AntropomorficosDocumento5 páginasRobots AntropomorficosbobguvAún no hay calificaciones
- CUESTIONARIO FINAL TCyR 1851-SBBDocumento16 páginasCUESTIONARIO FINAL TCyR 1851-SBBBrandon SalazarAún no hay calificaciones
- Diseño de Celdas RobóticasDocumento13 páginasDiseño de Celdas RobóticasMonse Acosta0% (1)
- Laboratorio 2Documento3 páginasLaboratorio 2Yurithsel Yaremi Gòmez AvilaAún no hay calificaciones
- Informe Práctica 3Documento13 páginasInforme Práctica 3Fabricio Veintimilla BautistaAún no hay calificaciones
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDocumento5 páginasLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioAún no hay calificaciones
- Cuestionario 02Documento26 páginasCuestionario 02Royeiro Xavi DuduAún no hay calificaciones
- Fase2 OscarGutierrez 299011 2Documento14 páginasFase2 OscarGutierrez 299011 2franklin martinezAún no hay calificaciones
- Paper. Robótica Industrial PDFDocumento6 páginasPaper. Robótica Industrial PDFSebastián Contreras Ortiz100% (2)
- Emit Emit-522 Formatoalumnotrabajofinal 25Documento11 páginasEmit Emit-522 Formatoalumnotrabajofinal 25Dariel Sebastian CbAún no hay calificaciones
- Unidad 3 36 PagDocumento36 páginasUnidad 3 36 PagadrianahoukiAún no hay calificaciones
- Reporte Seguidor de LineaDocumento11 páginasReporte Seguidor de Lineabryan jaret vargas gomezzAún no hay calificaciones
- Actividad 5Documento5 páginasActividad 5alfredoAún no hay calificaciones
- Laboratorio1 RoboticaDocumento5 páginasLaboratorio1 RoboticaFreddy Lp RoblesAún no hay calificaciones
- Informe MinisumoDocumento27 páginasInforme MinisumoDiego RamirezAún no hay calificaciones
- TEMA01Documento31 páginasTEMA01Manuel Garcia SuarezAún no hay calificaciones
- Fase2 OscarGutierrez 299011 2Documento10 páginasFase2 OscarGutierrez 299011 2franklin martinezAún no hay calificaciones
- TR2 PDFDocumento14 páginasTR2 PDFJesus LlontopAún no hay calificaciones
- Talrob - Actividad - Semana 01Documento3 páginasTalrob - Actividad - Semana 01Franco RM10Aún no hay calificaciones
- HT - Talrob - Semana 01Documento3 páginasHT - Talrob - Semana 01lesly chAún no hay calificaciones
- Clasificacion y Caracteristicas de RobotsDocumento4 páginasClasificacion y Caracteristicas de RobotsHernandez PadillaAún no hay calificaciones
- Cuestionario de Repaso de UnidadDocumento6 páginasCuestionario de Repaso de UnidadErick AlanisAún no hay calificaciones
- Robotica Industrial TR!Documento6 páginasRobotica Industrial TR!Renzo Lescano ParedesAún no hay calificaciones
- Control Numerico ExpoDocumento19 páginasControl Numerico ExpoJorge ZozayaAún no hay calificaciones
- Paper RV-M1Documento5 páginasPaper RV-M1dickforusAún no hay calificaciones
- RoboticaDocumento113 páginasRoboticaRafael RodriguezAún no hay calificaciones
- Estructura de Un Robot IndustrialDocumento22 páginasEstructura de Un Robot IndustrialMiroslava GalvánAún no hay calificaciones
- Robótica IndustrialDocumento8 páginasRobótica IndustrialRenzo Mamani CherresAún no hay calificaciones
- KUKA Primer InformeDocumento47 páginasKUKA Primer InformeAlexis VladimirAún no hay calificaciones
- Celda RoboticaDocumento22 páginasCelda RoboticaEberthson67% (3)
- Text 3Documento2 páginasText 3Fransceska GarridoAún no hay calificaciones
- Practica1 Introducción Ala RoboticaDocumento8 páginasPractica1 Introducción Ala RoboticaWeMakeThisZhit StoreAún no hay calificaciones
- Robo ZumoDocumento52 páginasRobo ZumoGilbertoCarrilloAún no hay calificaciones
- Practica 7 MecfDocumento10 páginasPractica 7 MecfEdgar ZepedaAún no hay calificaciones
- Actividad EntregableDocumento11 páginasActividad EntregableRhonny NaverosAún no hay calificaciones
- Cook Meneses Jordi Robot Control Odometrico Estado Del ArteDocumento63 páginasCook Meneses Jordi Robot Control Odometrico Estado Del ArteJhon MineroAún no hay calificaciones
- Tesis Brazo RoboticoDocumento27 páginasTesis Brazo RoboticoMauricio Avila Salgado50% (2)
- Tema 1.2 Estructura Mecánica de Un RobotDocumento10 páginasTema 1.2 Estructura Mecánica de Un RobotYami CortezAún no hay calificaciones
- Manufactura FlexibleDocumento14 páginasManufactura FlexibleEddy ZacariasAún no hay calificaciones
- Tarea#1 - Román Eduardo Olivares GómezDocumento17 páginasTarea#1 - Román Eduardo Olivares GómezLuis ChongAún no hay calificaciones
- Habilitación de Entradas Digitales para La Formación de TrayectoriasDocumento12 páginasHabilitación de Entradas Digitales para La Formación de TrayectoriasAdolfo Carlos V HerdzAún no hay calificaciones
- Estructura Mecánica de Un RobotDocumento13 páginasEstructura Mecánica de Un RobotKevin MontillaAún no hay calificaciones
- Cuestionario de Robotica 4Documento5 páginasCuestionario de Robotica 4Jerry MercyAún no hay calificaciones
- Reparación de instalaciones automatizadas. ELEE0109De EverandReparación de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Guia de Aprendizaje 4Documento6 páginasGuia de Aprendizaje 4AlexisAún no hay calificaciones
- Tesis Master Wei ZhengDocumento70 páginasTesis Master Wei ZhengProfesor ivan ayalaAún no hay calificaciones
- Tabla Con Los Tipos de DatosDocumento4 páginasTabla Con Los Tipos de DatosJosué GAún no hay calificaciones
- WCC Options es-ESDocumento442 páginasWCC Options es-ESaldtol21Aún no hay calificaciones
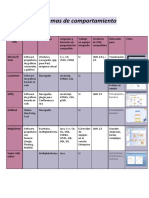
- Práctica 8-1 - Diagramas de ComportamientoDocumento1 páginaPráctica 8-1 - Diagramas de ComportamientoGabriela SeguraAún no hay calificaciones
- Implementación de Cluster de Computadoras para Aplicaciones de IngenieríaDocumento177 páginasImplementación de Cluster de Computadoras para Aplicaciones de IngenieríaTonyTonySAún no hay calificaciones
- Ingenieria de MantenimientoDocumento22 páginasIngenieria de MantenimientoJorge BadellAún no hay calificaciones
- 8 Logística 2019 IDocumento6 páginas8 Logística 2019 ICARLOS DANIEL HUAMAN QUISPEAún no hay calificaciones
- v1h5 Hoja Trabajo No.7 4 BACO Unidad II VDB Programacion 2023Documento4 páginasv1h5 Hoja Trabajo No.7 4 BACO Unidad II VDB Programacion 2023Wilder CanelAún no hay calificaciones
- MN 2022 Lenguaje de Programación I (1891)Documento191 páginasMN 2022 Lenguaje de Programación I (1891)Gilmar Perez DelgadoAún no hay calificaciones
- Directorio Funcionarios Uspec Julio 2023 - 0Documento10 páginasDirectorio Funcionarios Uspec Julio 2023 - 0Juan Carlos Jimenez CardonaAún no hay calificaciones
- (03 - 2) Actividad PC AlgoritmosAleatoriosDocumento7 páginas(03 - 2) Actividad PC AlgoritmosAleatoriosWilliam TovarAún no hay calificaciones
- Interfaces, Clases y Herencias en JAVADocumento2 páginasInterfaces, Clases y Herencias en JAVACyntia SanchezAún no hay calificaciones
- Manual Funcional ED-360 PDFDocumento177 páginasManual Funcional ED-360 PDFAlexander Cordoba Medina0% (1)
- Lab 10 - Programación y Control de Un Tanque - Control PIDDocumento32 páginasLab 10 - Programación y Control de Un Tanque - Control PIDRonaldo Sebastian ZeballosAún no hay calificaciones
- Modelo de Calidad de McCallDocumento3 páginasModelo de Calidad de McCallDiana JaimesAún no hay calificaciones
- Arquitectura de ClustersDocumento5 páginasArquitectura de Clustersmarkus298033Aún no hay calificaciones
- PSP 0Documento14 páginasPSP 0ivanAún no hay calificaciones
- CUESTIONARIO IS1 - FinDocumento119 páginasCUESTIONARIO IS1 - FinBorja Corral PérezAún no hay calificaciones
- Macros y Lenguaje VBA Aprender A Programar Con Excel 3 Edicion 1Documento351 páginasMacros y Lenguaje VBA Aprender A Programar Con Excel 3 Edicion 1ENRIQUEAún no hay calificaciones
- ReporterotacionDocumento4 páginasReporterotacionLiliana ZavalaAún no hay calificaciones
- Actividad 5 - Programación EstructuradaDocumento7 páginasActividad 5 - Programación EstructuradaRonald Carlos HVAún no hay calificaciones
- DiscretizacionDocumento23 páginasDiscretizacionGabriela MoralesAún no hay calificaciones
- Técnicas Avanzadas de Diseño de Software - TP 02Documento12 páginasTécnicas Avanzadas de Diseño de Software - TP 02Maximiliano GonzalezAún no hay calificaciones
- Integración de La IPO en El Proceso de Desarrollo de La Ingeniería Del Software - Propuestas Existentes y Temas A Resolver PDFDocumento8 páginasIntegración de La IPO en El Proceso de Desarrollo de La Ingeniería Del Software - Propuestas Existentes y Temas A Resolver PDFGRUNDOPUNKAún no hay calificaciones
- Etapa 1 - Sergio RodriguezDocumento5 páginasEtapa 1 - Sergio RodriguezJuan David Cruz LopezAún no hay calificaciones
- Unidad 2 S5-2Documento25 páginasUnidad 2 S5-2Delheimy Sanchez MartinezAún no hay calificaciones